Download as pdf or txt
You might also like
- Original PDF Physics 11th Edition by John D Cutnell PDFDocument41 pagesOriginal PDF Physics 11th Edition by John D Cutnell PDFnoe.simons46995% (42)
- ISSA Strength and Conditioning Performance Psychology Main Course TextbookDocument586 pagesISSA Strength and Conditioning Performance Psychology Main Course TextbookMadiha Saleem100% (8)
- PedestrianPlanningAndDesign JJFruin 1971Document38 pagesPedestrianPlanningAndDesign JJFruin 1971v0% (1)
- (Aquatic Exercise Association) Aquatic Fitness Pro (B-Ok - CC) PDFDocument422 pages(Aquatic Exercise Association) Aquatic Fitness Pro (B-Ok - CC) PDFVadim Gaivoronschi100% (1)
- Nancy Hamilton, Wendi Weimar, Kathryn Luttgens - Kinesiology - Scientific Basis of Human Motion-McGraw-Hill Education (2011)Document640 pagesNancy Hamilton, Wendi Weimar, Kathryn Luttgens - Kinesiology - Scientific Basis of Human Motion-McGraw-Hill Education (2011)RodrigoNo ratings yet
- Sports SpeedDocument256 pagesSports Speedandre50% (2)
- Brunnstrom's Movement Therapy in Hemiplegic Patient (Lower Limb)Document71 pagesBrunnstrom's Movement Therapy in Hemiplegic Patient (Lower Limb)Barney Cordova100% (2)
- CalDietz TriphasicTraining HighSchoolManual PDFDocument194 pagesCalDietz TriphasicTraining HighSchoolManual PDFr2r100% (10)
- Etienne Burdet, David W. Franklin, Theodore E. Milner - Human Robotics - Neuromechanics and Motor Control-The MIT Press (2013)Document290 pagesEtienne Burdet, David W. Franklin, Theodore E. Milner - Human Robotics - Neuromechanics and Motor Control-The MIT Press (2013)SIMET100% (1)
- Sport SpeedDocument256 pagesSport SpeedandreNo ratings yet
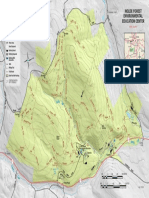
- Nolde Forest Trail MapDocument1 pageNolde Forest Trail MapReading_EagleNo ratings yet
- Gait Normalabnormal 120622041834 Phpapp02Document102 pagesGait Normalabnormal 120622041834 Phpapp02citaNo ratings yet
- Basic Biomechanics 9Th Edition Full ChapterDocument41 pagesBasic Biomechanics 9Th Edition Full Chaptersarah.maha714100% (22)
- ebook download (eBook PDF) Basic Biomechanics 9th Edition all chapterDocument43 pagesebook download (eBook PDF) Basic Biomechanics 9th Edition all chapterthunetuvia75100% (5)
- FULL Download Ebook PDF Kinesiology Scientific Basis of Human Motion 12th Edition PDF EbookDocument41 pagesFULL Download Ebook PDF Kinesiology Scientific Basis of Human Motion 12th Edition PDF Ebookconnie.vasquez24298% (45)
- Full Download Book Basic Biomechanics Team Ira PDFDocument41 pagesFull Download Book Basic Biomechanics Team Ira PDFmaryann.alu279100% (32)
- Strength and Power For Handball 2021 Ret6eiDocument318 pagesStrength and Power For Handball 2021 Ret6eiEndi MacingoNo ratings yet
- MCT 342 Lecture 2 Spring 2021Document90 pagesMCT 342 Lecture 2 Spring 2021Youssef NagatyNo ratings yet
- Biomechanics of Sport and ExerciseDocument12 pagesBiomechanics of Sport and ExerciseMei ChintiaNo ratings yet
- 14 Biomechanics of Normal Human Gait PDFDocument26 pages14 Biomechanics of Normal Human Gait PDFDiego A. MezaNo ratings yet
- 3 Speed and AgilityDocument37 pages3 Speed and Agilitymartimparreira69No ratings yet
- Strength Training For Soccer (Bram Swinnen) (Z-Library) - 7Document1 pageStrength Training For Soccer (Bram Swinnen) (Z-Library) - 7guypetro6No ratings yet
- Cor Stability PersentaseDocument31 pagesCor Stability PersentaseRidha SyahputraNo ratings yet
- Strength and Conditioning 1st Chapter 2Document14 pagesStrength and Conditioning 1st Chapter 2Rayhan Islam 1915281680No ratings yet
- Biomechanics05 001Document72 pagesBiomechanics05 001Muhammad FahmyNo ratings yet
- Sample Occupational Therapy For Physical DysfunctionDocument3 pagesSample Occupational Therapy For Physical DysfunctionOT PRACTICE TIME100% (1)
- Me PDFDocument553 pagesMe PDFSoma GhoshNo ratings yet
- Types of Muscle ContractionDocument21 pagesTypes of Muscle ContractionlyleNo ratings yet
- Textbook Laboratory and Field Exercises in Sport and Exercise Biomechanics James Watkins Ebook All Chapter PDFDocument53 pagesTextbook Laboratory and Field Exercises in Sport and Exercise Biomechanics James Watkins Ebook All Chapter PDFfrank.pleasanton324100% (12)
- Introduction and Opensim: Bme 599: Modeling & Simulation of MovementDocument44 pagesIntroduction and Opensim: Bme 599: Modeling & Simulation of MovementJackelineTafurOviedoNo ratings yet
- 2128ebook download (Original PDF) Physics, 11th Edition by John D. Cutnell all chapterDocument43 pages2128ebook download (Original PDF) Physics, 11th Edition by John D. Cutnell all chaptermaliaodumii100% (1)
- Full Download PDF of (Original PDF) Physics, 11th Edition by John D. Cutnell All ChapterDocument43 pagesFull Download PDF of (Original PDF) Physics, 11th Edition by John D. Cutnell All Chapterheittoatewe100% (6)
- Mechanics by Benjamin CrowellDocument566 pagesMechanics by Benjamin CrowellMuhammad Shafnoon KabirNo ratings yet
- Shoulder Model2Document30 pagesShoulder Model2carlos ali issaNo ratings yet
- Vladimir Zatsiorsky, Boris Prilutsky-Biomechanics of Skeletal Muscles-Human Kinetics (2012) PDFDocument536 pagesVladimir Zatsiorsky, Boris Prilutsky-Biomechanics of Skeletal Muscles-Human Kinetics (2012) PDFJoao CunhaNo ratings yet
- Are Complex Control Signals Required For Human ArmDocument35 pagesAre Complex Control Signals Required For Human ArmHarsh DhruveNo ratings yet
- Describing MotionDocument24 pagesDescribing MotionAbd Hasib MuhaeminNo ratings yet
- SPS501 Sport Biomechanics: Chapter 5 - Applications in Linear and Angular KinematicsDocument44 pagesSPS501 Sport Biomechanics: Chapter 5 - Applications in Linear and Angular Kinematicsafifah temiziNo ratings yet
- 1.2.a Physical TrainingDocument17 pages1.2.a Physical TrainingRICA ELACIONNo ratings yet
- Fernandez 5768 Chapter-33 MainDocument14 pagesFernandez 5768 Chapter-33 MainMaluNo ratings yet
- Describing MotionDocument26 pagesDescribing MotionIin nur asriNo ratings yet
- Biomechanics (Autosaved)Document30 pagesBiomechanics (Autosaved)nur'afeefa binti hamdanNo ratings yet
- Komunikasi Dalam Pelayanan KesehatanDocument23 pagesKomunikasi Dalam Pelayanan KesehatanNi Made M JNo ratings yet
- Newtonian Physics, by Benjamin CrowellDocument296 pagesNewtonian Physics, by Benjamin CrowellBenjamin CrowellNo ratings yet
- Developing Agility and Quickness (Etc.) (Z-Library) - 80Document2 pagesDeveloping Agility and Quickness (Etc.) (Z-Library) - 80guypetro6No ratings yet
- Free Download Animal Locomotion C Oabs T Oxford Animal Biology 2Nd Edition Andrew Biewener Full Chapter PDFDocument51 pagesFree Download Animal Locomotion C Oabs T Oxford Animal Biology 2Nd Edition Andrew Biewener Full Chapter PDFrobert.holbrook711100% (22)
- Animal Locomotion C Oabs T Oxford Animal Biology 2Nd Edition Andrew Biewener Full ChapterDocument67 pagesAnimal Locomotion C Oabs T Oxford Animal Biology 2Nd Edition Andrew Biewener Full Chapterpamela.stanley399100% (2)
- MechanicsDocument558 pagesMechanicsfejiloNo ratings yet
- Trotting, Pacing and Bounding by A Quadruped Robot: Marc HDocument19 pagesTrotting, Pacing and Bounding by A Quadruped Robot: Marc HPrajwal KrishnaNo ratings yet
- Chris McMullen - Essential Calculus-Based Physics Study Guide Workbook - The Laws of Motion Copie 4Document1 pageChris McMullen - Essential Calculus-Based Physics Study Guide Workbook - The Laws of Motion Copie 4youssef.hilali89yhNo ratings yet
- 11th Class Physics WWW Prep4civils ComDocument414 pages11th Class Physics WWW Prep4civils ComPrep4Civils75% (4)
- Newtonian PhysicsDocument299 pagesNewtonian PhysicsdarcasNo ratings yet
- Magisterarbeit MuskelmodellierungDocument146 pagesMagisterarbeit MuskelmodellierungSebastian Bichler100% (1)
- Kinesiology and Biomechanics in SportsDocument8 pagesKinesiology and Biomechanics in Sportssharma.devki2018No ratings yet
- Title of Kinematics - 001Document1 pageTitle of Kinematics - 001Siddharth JainNo ratings yet
- ebook download (eBook PDF) Dynamics of Structures 4th Edition all chapterDocument43 pagesebook download (eBook PDF) Dynamics of Structures 4th Edition all chapterbleszenku100% (5)
- Full Download PDF of (Ebook PDF) Dynamics of Structures 4th Edition All ChapterDocument43 pagesFull Download PDF of (Ebook PDF) Dynamics of Structures 4th Edition All Chaptereproryaksh100% (7)
- Strength Program Design For The Running AthleteDocument34 pagesStrength Program Design For The Running AthletepfluchoNo ratings yet
- Animal Locomotion C Oabs T Oxford Animal Biology 2Nd Edition Andrew Biewener Full Chapter PDFDocument69 pagesAnimal Locomotion C Oabs T Oxford Animal Biology 2Nd Edition Andrew Biewener Full Chapter PDFalwadyipuisa100% (7)
- Feedback Systems: An Introduction for Scientists and Engineers, Second EditionFrom EverandFeedback Systems: An Introduction for Scientists and Engineers, Second EditionNo ratings yet
- Adaptive Structures: Engineering ApplicationsFrom EverandAdaptive Structures: Engineering ApplicationsDavid WaggNo ratings yet
- Sensing, Intelligence, Motion: How Robots and Humans Move in an Unstructured WorldFrom EverandSensing, Intelligence, Motion: How Robots and Humans Move in an Unstructured WorldNo ratings yet
- MMW Q1Document4 pagesMMW Q1Samantha AbelloNo ratings yet
- Abstract Reasoning 2Document14 pagesAbstract Reasoning 2Samantha AbelloNo ratings yet
- Module 2 Output Page 2Document1 pageModule 2 Output Page 2Samantha AbelloNo ratings yet
- Abstract ReasoningDocument4 pagesAbstract ReasoningSamantha AbelloNo ratings yet
- Module 2 Output Page 1Document1 pageModule 2 Output Page 1Samantha AbelloNo ratings yet
- Opportunities For Opportunities For: Work, WorkDocument5 pagesOpportunities For Opportunities For: Work, WorkMaarten JacobsNo ratings yet
- Modeling and Robust Control of Quadruped RobotDocument5 pagesModeling and Robust Control of Quadruped RobotMer FroNo ratings yet
- International Shoe Size Conversion ChartsDocument1 pageInternational Shoe Size Conversion Chartsmartin elias vargas salasNo ratings yet
- Buy Latest Kids Footwear Online at Decathlon IndiaDocument1 pageBuy Latest Kids Footwear Online at Decathlon Indiashneha12344860No ratings yet
- A Review of Gait Cycle and Its ParametersDocument7 pagesA Review of Gait Cycle and Its ParametersDoinaBuNo ratings yet
- The Elves and The ShoemakerDocument2 pagesThe Elves and The ShoemakerThila SingamNo ratings yet
- Katalog Red WingDocument19 pagesKatalog Red Wingmanox007No ratings yet
- Return DemonstrationDocument8 pagesReturn DemonstrationCDT Feliciano Fernando JardelezaNo ratings yet
- City Sustainability: The Influence of Walkability On Built Environments City Sustainability: The Influence of Walkability On Built EnvironmentsDocument8 pagesCity Sustainability: The Influence of Walkability On Built Environments City Sustainability: The Influence of Walkability On Built EnvironmentsNicole VerosilNo ratings yet
- Ergonomics For Rehabilitation Professionals: Shrawan KumarDocument18 pagesErgonomics For Rehabilitation Professionals: Shrawan Kumarsmith197077No ratings yet
- James A. Garfield National Historic Site Special Events Calendar 2018Document18 pagesJames A. Garfield National Historic Site Special Events Calendar 2018Anonymous 3yDD4dP5No ratings yet
- Staircase DrawingDocument1 pageStaircase Drawingsrinivas pNo ratings yet
- School Shoes PortfolioDocument29 pagesSchool Shoes PortfoliodiscardmailsNo ratings yet
- Energetics and Biomechanics of Inclined Treadmill Walking in Obese AdultsDocument9 pagesEnergetics and Biomechanics of Inclined Treadmill Walking in Obese AdultssdjuknicNo ratings yet
- Tai ChiDocument24 pagesTai Chiリ リシャバNo ratings yet
- USDOT - Pedestrian and Walkway Design GuidelinesDocument248 pagesUSDOT - Pedestrian and Walkway Design GuidelinesTaylor W. Hickem100% (1)
- Normal & Abnormal GaitDocument29 pagesNormal & Abnormal GaitVidhya anand MNo ratings yet
- DPWH - Do - 034 - S2012 - Guidelines On The Implementation of Pedestrian Refuge Island Along National RoadsDocument6 pagesDPWH - Do - 034 - S2012 - Guidelines On The Implementation of Pedestrian Refuge Island Along National RoadsN.a. M. TandayagNo ratings yet
- Transfer Using Gait Belt PDFDocument2 pagesTransfer Using Gait Belt PDFKim WashingtonNo ratings yet
- How Far Should Parkers WalkDocument4 pagesHow Far Should Parkers WalkYusfita Chrisna WikartaNo ratings yet
- Return To Running ProgramDocument1 pageReturn To Running ProgramMark DingleNo ratings yet
- Pedestrian-Friendly Streetscape in A Tropical Business DistrictDocument7 pagesPedestrian-Friendly Streetscape in A Tropical Business DistrictRachel SorianoNo ratings yet
- Skechers Women's Uno Frosty Kicks Sneaker DSW CanadaDocument1 pageSkechers Women's Uno Frosty Kicks Sneaker DSW Canadadeepika sharmaNo ratings yet
- Kisi Soal AKM BING Kls 7 Genap2020 - TriDocument3 pagesKisi Soal AKM BING Kls 7 Genap2020 - TriTri MacoaloNo ratings yet
- Biomechanical Effects of Wearing High-Heeled Shoes: Chang-Min Lee, Eun-Hee Jeong, Andris FreivaldsDocument6 pagesBiomechanical Effects of Wearing High-Heeled Shoes: Chang-Min Lee, Eun-Hee Jeong, Andris FreivaldsSilviSilvaniaNo ratings yet
- Biomecanica Da ObesidadeDocument9 pagesBiomecanica Da ObesidadehgtrainerNo ratings yet