Download as pdf or txt
You might also like
- ParaphraseDocument51 pagesParaphrasevincent tekeyNo ratings yet
- 3D-Shapes Symmetry Patterns-Term2 WorksheetDocument3 pages3D-Shapes Symmetry Patterns-Term2 Worksheetmahroof50% (2)
- Reeds Ship Construction PDFDocument103 pagesReeds Ship Construction PDFJohn Rodrigues100% (1)
- Module 4 Instruction and AdressingDocument60 pagesModule 4 Instruction and AdressingMairos Kunze Bonga0% (1)
- Coa LMRDocument11 pagesCoa LMRff8005636No ratings yet
- The Central Processing Unit 3.1 Computer Arithmetic 3.1.1 The Arithmetic and Logic Unit (ALU)Document12 pagesThe Central Processing Unit 3.1 Computer Arithmetic 3.1.1 The Arithmetic and Logic Unit (ALU)Tamene TekileNo ratings yet
- Draw The Block Diagram of Von Neumann Architecture and Explain About Its Parts in Brief AnswerDocument7 pagesDraw The Block Diagram of Von Neumann Architecture and Explain About Its Parts in Brief AnswerhayerpaNo ratings yet
- Module 2 CoaDocument13 pagesModule 2 CoacabbywarzoneNo ratings yet
- BCA 106 SolvedDocument15 pagesBCA 106 SolvedGhanshyam SharmaNo ratings yet
- Microprocessor FundamentalsDocument14 pagesMicroprocessor Fundamentalssenthilkumarm50No ratings yet
- Assignment 4: Course Instructor / Lab EngineerDocument8 pagesAssignment 4: Course Instructor / Lab EngineerNitasha HumaNo ratings yet
- Module 4Document12 pagesModule 4Bijay NagNo ratings yet
- Instruction Set and Addressing ModesDocument14 pagesInstruction Set and Addressing ModesAastha KohliNo ratings yet
- Instruction SetsDocument44 pagesInstruction SetsAlprinces RespicioNo ratings yet
- Cpu 1Document6 pagesCpu 1mayan nelsonNo ratings yet
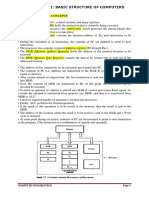
- Module 1: Basic Structure of Computers 1.1 Basic Operational ConceptsDocument34 pagesModule 1: Basic Structure of Computers 1.1 Basic Operational Conceptsyashu JNo ratings yet
- PipelineDocument30 pagesPipelineSushrutNo ratings yet
- Instruction PipelineDocument16 pagesInstruction PipelineRamya RamasubramanianNo ratings yet
- CA Classes-76-80Document5 pagesCA Classes-76-80SrinivasaRaoNo ratings yet
- Computer Organization and Architecture G11+G12+G13 AssignmentDocument14 pagesComputer Organization and Architecture G11+G12+G13 AssignmentParth ChauhanNo ratings yet
- Computer Architecture 16 MarksDocument28 pagesComputer Architecture 16 MarksBalachandar2000100% (1)
- FinalDocument26 pagesFinalHứa Đăng KhoaNo ratings yet
- Computer Architecture (Bcs504) Unit IDocument51 pagesComputer Architecture (Bcs504) Unit IJayed Ahmed LaskarNo ratings yet
- COM AssignmentDocument27 pagesCOM AssignmentsunnybaggaNo ratings yet
- Pco Note2Document22 pagesPco Note2Sarbesh ChaudharyNo ratings yet
- PIpeline Processing and Multi ProcessingDocument16 pagesPIpeline Processing and Multi ProcessingYashvant singh GaurNo ratings yet
- CA Classes-61-65Document5 pagesCA Classes-61-65SrinivasaRaoNo ratings yet
- # Tutorial 9 & 10Document6 pages# Tutorial 9 & 10aojiru.coNo ratings yet
- ACA Question BankDocument19 pagesACA Question BankVanitha VivekNo ratings yet
- Unit-4 CoaDocument17 pagesUnit-4 CoaArun KrishNo ratings yet
- Unit 3 Central Processing Unit and Instructions: StructureDocument24 pagesUnit 3 Central Processing Unit and Instructions: StructureSny Kumar DeepakNo ratings yet
- Cycle 2Document8 pagesCycle 2ireneNo ratings yet
- Instruction Set Architecture (ISA) NotesDocument12 pagesInstruction Set Architecture (ISA) NotesSaira GillaniNo ratings yet
- Unit 3: Machine InstructionsDocument16 pagesUnit 3: Machine Instructionsshreya ChauhanNo ratings yet
- BCA-305 Computer Architecture Unit 1-Introduction: Dr. Santosh Kumar Lucknow Public College of Professional StudiesDocument34 pagesBCA-305 Computer Architecture Unit 1-Introduction: Dr. Santosh Kumar Lucknow Public College of Professional StudiessadsaNo ratings yet
- Addressing ModeDocument8 pagesAddressing ModerajNo ratings yet
- Unit 2Document60 pagesUnit 2Ashish kumarNo ratings yet
- 5EC3-01: Computer Architecture: UNIT-3Document11 pages5EC3-01: Computer Architecture: UNIT-3Himanshi SainiNo ratings yet
- DPCO Unit3 2mark Q&ADocument11 pagesDPCO Unit3 2mark Q&Akanimozhi rajasekarenNo ratings yet
- Chapter 5 A Closer Look at Instruction Set Architectures: Lecturer: Hao Zheng Comp Sci & Eng, USFDocument50 pagesChapter 5 A Closer Look at Instruction Set Architectures: Lecturer: Hao Zheng Comp Sci & Eng, USFGreen ChiquitaNo ratings yet
- System On Chip: Inside Processor Pipeline StallsDocument12 pagesSystem On Chip: Inside Processor Pipeline StallsPinagani SurajNo ratings yet
- Introduction To MIPS ArchitectureDocument10 pagesIntroduction To MIPS ArchitectureJahanzaib AwanNo ratings yet
- Cep 4Document11 pagesCep 4ShivamNo ratings yet
- Coa Unit 1,2 4MDocument13 pagesCoa Unit 1,2 4MVishesh RankaNo ratings yet
- Co RegDocument8 pagesCo Regaryan.shivam.10No ratings yet
- Answer of Q.2: Figure 1: A Generic ALU That Has 2 Inputs and 1 OutputDocument12 pagesAnswer of Q.2: Figure 1: A Generic ALU That Has 2 Inputs and 1 OutputAmit JainNo ratings yet
- MIPS Report FileDocument17 pagesMIPS Report FileAayushiNo ratings yet
- Co Module1 Notes 21schemeDocument14 pagesCo Module1 Notes 21schemeShivam KumarNo ratings yet
- Cse IV Computer Organization (10cs46) SolutionDocument46 pagesCse IV Computer Organization (10cs46) SolutionTasleem Arif100% (1)
- Concept of Pipelining - Computer Architecture Tutorial What Is Pipelining?Document5 pagesConcept of Pipelining - Computer Architecture Tutorial What Is Pipelining?Ayush Kumar100% (1)
- NAME: Fuldeore Srushti Vinod Subject: Coa ID: 201071908 BRANCH: ComputerDocument7 pagesNAME: Fuldeore Srushti Vinod Subject: Coa ID: 201071908 BRANCH: ComputerSrushti vinod FuldeoreNo ratings yet
- System On Chip: Inside Processor Pipeline StallsDocument12 pagesSystem On Chip: Inside Processor Pipeline StallsPinagani SurajNo ratings yet
- 4-Concept of PipeliningDocument20 pages4-Concept of Pipeliningtabin iftakharNo ratings yet
- 4.2 5-Stage Pipeline ARM Organization: Memory Bottle NeckDocument6 pages4.2 5-Stage Pipeline ARM Organization: Memory Bottle NeckchaitudscNo ratings yet
- Chapter 2 ProposedDocument62 pagesChapter 2 Proposedvincent tekeyNo ratings yet
- UNIT-3: MIPS InstructionsDocument15 pagesUNIT-3: MIPS InstructionsMukeshram.B AIDS20No ratings yet
- Cse IV Computer Organization (10cs46) SolutionDocument62 pagesCse IV Computer Organization (10cs46) Solutionnbpr0% (1)
- Coa-2-Marks-Q & ADocument30 pagesCoa-2-Marks-Q & AArup RakshitNo ratings yet
- Instruction TablesDocument323 pagesInstruction TablestahlokoNo ratings yet
- Pipeline ProcessingDocument28 pagesPipeline Processinganismitaray14No ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- L15 Autoregressive and Reversible ModelsDocument7 pagesL15 Autoregressive and Reversible Modelsparvathyp220246ecNo ratings yet
- Core Maths ODEDocument49 pagesCore Maths ODEparvathyp220246ecNo ratings yet
- ProbabilityDocument22 pagesProbabilityparvathyp220246ecNo ratings yet
- CountersDocument4 pagesCountersparvathyp220246ecNo ratings yet
- PRML Slides 2Document86 pagesPRML Slides 2parvathyp220246ecNo ratings yet
- Assignment 7Document24 pagesAssignment 7parvathyp220246ecNo ratings yet
- A CNN-Based Sentinel-2 Image Super-Resolution Method Using Multiobjective TrainingDocument14 pagesA CNN-Based Sentinel-2 Image Super-Resolution Method Using Multiobjective Trainingparvathyp220246ecNo ratings yet
- Cell Cycle Regulation and CancerDocument1 pageCell Cycle Regulation and CancerGerlJerlNo ratings yet
- Assignment BasicsDocument11 pagesAssignment BasicsusmanahmadawanNo ratings yet
- EVMU-EVMUG - Instruction and OperationDocument44 pagesEVMU-EVMUG - Instruction and OperationDavidThânNo ratings yet
- Single / Multi-Station Subplates: Cuparmuir - Cupar - Fife - KY15 5SL - UKDocument52 pagesSingle / Multi-Station Subplates: Cuparmuir - Cupar - Fife - KY15 5SL - UKPSINGENIERIA2No ratings yet
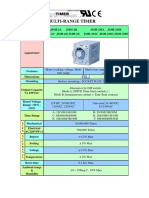
- Delay On Multi-Range Timer: FIG. 2 PF085ADocument2 pagesDelay On Multi-Range Timer: FIG. 2 PF085ADaniel CornielNo ratings yet
- Chapter 2Document50 pagesChapter 2mopliqNo ratings yet
- Zaha HadidDocument14 pagesZaha Hadidjanhavi28No ratings yet
- R. A Place in A Wall Where You Can Connect An Electrical Object To The Main Supply of ElectricityDocument9 pagesR. A Place in A Wall Where You Can Connect An Electrical Object To The Main Supply of ElectricityChan PhakkdeyNo ratings yet
- Model Pl5 Service ManualDocument31 pagesModel Pl5 Service ManualEd CalheNo ratings yet
- Mitutoyo - System Przenoszenia Danych USB Input Tool Direct USB-ITN - PRE1343 - 2014 ENDocument2 pagesMitutoyo - System Przenoszenia Danych USB Input Tool Direct USB-ITN - PRE1343 - 2014 END.T.No ratings yet
- Lab01 Exercise LinuxDocument7 pagesLab01 Exercise LinuxBhupinder SharmaNo ratings yet
- Improving The Performance and Bandwidth EfficiencyDocument12 pagesImproving The Performance and Bandwidth EfficiencyalexNo ratings yet
- Group 4 Reporting OMTQMDocument67 pagesGroup 4 Reporting OMTQMJessica VasquezNo ratings yet
- Name Source Description Syntax Par, Frequency, Basis)Document12 pagesName Source Description Syntax Par, Frequency, Basis)alsaban_7No ratings yet
- AE1222 2021 GROUP E10E WingDesignReportDocument100 pagesAE1222 2021 GROUP E10E WingDesignReportBowmigowNo ratings yet
- Nitrogen Fixation - AssignmentDocument2 pagesNitrogen Fixation - Assignmentkilanko timilehinNo ratings yet
- Achiever DLP Unit Test 3 SoDocument11 pagesAchiever DLP Unit Test 3 SoChetan LaxkarNo ratings yet
- Trumpet: Vacuum Tube MM PhonostageDocument8 pagesTrumpet: Vacuum Tube MM PhonostageSridip BanerjeeNo ratings yet
- Metal PlasticityDocument13 pagesMetal PlasticityAmando GallardoNo ratings yet
- Popcon ConfigDocument30 pagesPopcon ConfigSupriono LegiminNo ratings yet
- Tableau Text Table - Tableau Crosstab: 1. ObjectiveDocument5 pagesTableau Text Table - Tableau Crosstab: 1. ObjectiveGiri RajNo ratings yet
- 3GPP TS 31.102 - Characteristics of The Universal Subscriber Identity Module (USIM) ApplicationDocument287 pages3GPP TS 31.102 - Characteristics of The Universal Subscriber Identity Module (USIM) Applicationtiagobilly_1212No ratings yet
- 19 LO4 Measures of Central Tendency and SpreadDocument9 pages19 LO4 Measures of Central Tendency and SpreadwmathematicsNo ratings yet
- Toc Recursive Function TheoryDocument83 pagesToc Recursive Function TheoryTaqi Shah100% (1)
- Ha ClusterDocument78 pagesHa ClusterHoàng TrườngNo ratings yet
- Section C - Group 5 - Merton Truck CompanyDocument10 pagesSection C - Group 5 - Merton Truck CompanyVaibhav VermaNo ratings yet
- Delamination Measurement in Glass Fibre Reinforced Poly - 2023 - Composites PartDocument12 pagesDelamination Measurement in Glass Fibre Reinforced Poly - 2023 - Composites PartGUANCI ZHUNo ratings yet
- Rebuilding Rails - Free ChaptersDocument45 pagesRebuilding Rails - Free ChaptersfarmisenNo ratings yet