Download as pdf or txt
You might also like
- Solid Mechanics (Bending of A T Beam Lab Report)Document12 pagesSolid Mechanics (Bending of A T Beam Lab Report)rajesh yadavNo ratings yet
- Broms MethodDocument1 pageBroms MethodTemp Temptemp100% (3)
- Solution CH3Document46 pagesSolution CH3roundstorm1100% (1)
- Analytical Derivation of Induction Motors Inductances Under Eccentricity ConditionsDocument16 pagesAnalytical Derivation of Induction Motors Inductances Under Eccentricity ConditionsBui TrungTuyen (Beo)No ratings yet
- Vibration Diagnostics of Rolling Mills Based On Nonlinear Effects in DynamicsDocument6 pagesVibration Diagnostics of Rolling Mills Based On Nonlinear Effects in DynamicsSontosh BhattacharjeeNo ratings yet
- Second Class /materials Engineering Department: TorsionDocument5 pagesSecond Class /materials Engineering Department: TorsionYzhel LopezNo ratings yet
- Torsional PendulumDocument14 pagesTorsional PendulumAbdul Razak SoaleNo ratings yet
- Mte360 W08 MT1Document2 pagesMte360 W08 MT1dholedays100% (1)
- The Effects of Bolt Preload On Vibration Amplitude of Gantry CNC RouterDocument10 pagesThe Effects of Bolt Preload On Vibration Amplitude of Gantry CNC RouterPHẠM TRẦN LƯUNo ratings yet
- MT Pre-PritntDocument9 pagesMT Pre-PritntGamal SalehNo ratings yet
- A Study of The In-Plane Force Transmission of Tires: H. R. DorfiDocument26 pagesA Study of The In-Plane Force Transmission of Tires: H. R. DorfisiritapeNo ratings yet
- Example 3-12: SolutionDocument12 pagesExample 3-12: SolutionSamawat AhsanNo ratings yet
- Howe or Pratt Truss?Document51 pagesHowe or Pratt Truss?MICAH BELOCURANo ratings yet
- HookesDocument5 pagesHookesMaxi MusNo ratings yet
- Heat Dynemic Gear Transmıssıon SystemDocument18 pagesHeat Dynemic Gear Transmıssıon SystemkarayagizmuhammedNo ratings yet
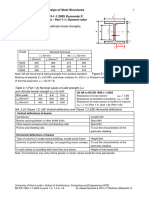
- Tabels Extracts From Eurocode 3Document12 pagesTabels Extracts From Eurocode 3hisham.alazzaniNo ratings yet
- HK212Document7 pagesHK212Minh HuyNo ratings yet
- OjobbnDocument2 pagesOjobbnKartik BhararaNo ratings yet
- Research On Moment of Inertia Measurement Method2019Document7 pagesResearch On Moment of Inertia Measurement Method2019ait oubella marouaneNo ratings yet
- Kinematics, Dynamics and Mechanical Efficiency of A Cardan Joint With Manufacturing Tolerances - Part IiDocument6 pagesKinematics, Dynamics and Mechanical Efficiency of A Cardan Joint With Manufacturing Tolerances - Part IiDenis MataNo ratings yet
- An Optimum Braking StrategyDocument4 pagesAn Optimum Braking StrategyAleksandar GrkicNo ratings yet
- A Review of Dynamic Models Used in Simulation of Gear TransmissionsDocument10 pagesA Review of Dynamic Models Used in Simulation of Gear TransmissionsKhalid F AbdulraheemNo ratings yet
- A Slip Factor Calculation in Centrifugal Impellers Based On Linear Cascade DataDocument21 pagesA Slip Factor Calculation in Centrifugal Impellers Based On Linear Cascade DatajavadamniNo ratings yet
- Tutorial2 SolutionDocument9 pagesTutorial2 SolutionSam StideNo ratings yet
- IPhO 2000Document26 pagesIPhO 2000Gustavo Oliveira SilvaNo ratings yet
- Ball Screw Selection ExerciseDocument7 pagesBall Screw Selection ExercisemaddyaugNo ratings yet
- 5 Position Control IDocument16 pages5 Position Control Imstudent327No ratings yet
- Torque Production in Permanent-MagnetDocument6 pagesTorque Production in Permanent-MagnetTien Dung TranNo ratings yet
- An Analysis of Possible AssessmentDocument9 pagesAn Analysis of Possible AssessmentYanyan2009No ratings yet
- Balkan Journal of Mechanical Transmissions: ISSN 2069-5497Document8 pagesBalkan Journal of Mechanical Transmissions: ISSN 2069-5497Vaisakh SomakumarNo ratings yet
- 7 Sem Past - PapersDocument13 pages7 Sem Past - Papersatif naeemNo ratings yet
- Exp 8Document28 pagesExp 8Faiz MsNo ratings yet
- CurvesDocument9 pagesCurvesAmadeusNo ratings yet
- Torsion Design of Prestressed ConcreteDocument20 pagesTorsion Design of Prestressed ConcreteDr. M.V.Krishna RaoNo ratings yet
- TE-01_TYM_P1_2426_Code-ADocument19 pagesTE-01_TYM_P1_2426_Code-AAmishi GuptaNo ratings yet
- 2022.05.15 Đáp Án Final Exam Machine Elements PDFDocument7 pages2022.05.15 Đáp Án Final Exam Machine Elements PDFHoàng QuânNo ratings yet
- Torsion I: Prepared By: Nash BonaventuraDocument25 pagesTorsion I: Prepared By: Nash Bonaventuranashb96No ratings yet
- Capitulo 6 - Torsion en Ejes Prismaticos PDFDocument42 pagesCapitulo 6 - Torsion en Ejes Prismaticos PDFCristian David BravoNo ratings yet
- CH6 PDFDocument45 pagesCH6 PDFAguero AgueroNo ratings yet
- FORMATO MATPR EES 8-PagDocument8 pagesFORMATO MATPR EES 8-Pagarlette caizaNo ratings yet
- CFSD Report RP18 2Document23 pagesCFSD Report RP18 2m53196No ratings yet
- Sub Assign3 GeoDocument5 pagesSub Assign3 GeoKwok Cheong ChengNo ratings yet
- Amr.591 593.196Document6 pagesAmr.591 593.196matrix dNo ratings yet
- Frictional Torque On A Rotating Disc: Carl E MunganDocument5 pagesFrictional Torque On A Rotating Disc: Carl E MunganSeethaNo ratings yet
- Dynamics of Machines: I) Objective QuestionsDocument12 pagesDynamics of Machines: I) Objective QuestionsnagarajNo ratings yet
- Physics - 25 Jan - Shift-2Document16 pagesPhysics - 25 Jan - Shift-2DEPRESSED GAMERNo ratings yet
- 004tyson - Edited - NEWDocument11 pages004tyson - Edited - NEWFilip Van den AbeeleNo ratings yet
- 1.stress and Strain PDFDocument33 pages1.stress and Strain PDFharshdeepNo ratings yet
- Etep 1Document20 pagesEtep 1berndNo ratings yet
- J Engfailanal 2007 01 010Document10 pagesJ Engfailanal 2007 01 010luisNo ratings yet
- Me 2009 Gate PaperDocument13 pagesMe 2009 Gate PaperSudheer ReddyNo ratings yet
- Chap03 ADocument36 pagesChap03 ASaira TahirNo ratings yet
- Chasis Assignment 2Document8 pagesChasis Assignment 2Sandeep MaddyNo ratings yet
- Modelling and Vibration Analysis of Misaligned Rotor-Ball Bearing SystemsDocument16 pagesModelling and Vibration Analysis of Misaligned Rotor-Ball Bearing Systemsmanjunath k sNo ratings yet
- Automatic Quality Measuring of Precision GearboxesDocument6 pagesAutomatic Quality Measuring of Precision GearboxesPeterNo ratings yet
- EC2 Bending With or Without Axial ForceDocument11 pagesEC2 Bending With or Without Axial ForceselinaNo ratings yet
- Mechanics Ii Time Allowed: 2 HoursDocument9 pagesMechanics Ii Time Allowed: 2 HourssubipuruNo ratings yet
- Extracts From Ec3 For Students 2012Document6 pagesExtracts From Ec3 For Students 2012Alexandru MarincuNo ratings yet
- Winfrith 11may10 SchwerDocument28 pagesWinfrith 11may10 SchwerprashantsjceNo ratings yet
- Materials Science and Technology of Optical FabricationFrom EverandMaterials Science and Technology of Optical FabricationNo ratings yet
- Unit 5.4 Magnetism Practice Test AnswersDocument10 pagesUnit 5.4 Magnetism Practice Test AnswersAlicias YongNo ratings yet
- Figure 1 Model Geometry and Generated Mesh (PLAXIS 2D) : 1.0m Mesh Refinement ZoneDocument4 pagesFigure 1 Model Geometry and Generated Mesh (PLAXIS 2D) : 1.0m Mesh Refinement ZoneJohn Steven Anaya InfantesNo ratings yet
- Homework 2.2Document10 pagesHomework 2.2Emiliano AlbánNo ratings yet
- E202: Conservation of Momentum: The Ballistic Pendulum POLICIOUS, Mark Angelo FDocument5 pagesE202: Conservation of Momentum: The Ballistic Pendulum POLICIOUS, Mark Angelo FMark Angelo PoliciosNo ratings yet
- On Sound: Phys130, A04 Dr. Robert MacdonaldDocument24 pagesOn Sound: Phys130, A04 Dr. Robert MacdonaldAlinaBogoiNo ratings yet
- Experience With Torsional Vibration at Reciprocating CompressorsDocument14 pagesExperience With Torsional Vibration at Reciprocating CompressorsÏmŗäņPŗïņċëNo ratings yet
- Wind-Induced Vibration of Structural CablesDocument72 pagesWind-Induced Vibration of Structural CablessazradNo ratings yet
- Power Transmission and Conveying Solutions: S.I.T. Indeva, IncDocument12 pagesPower Transmission and Conveying Solutions: S.I.T. Indeva, IncRamon Gaytan RojasNo ratings yet
- D. S. Chandrasekharaiah and Lokenath Debnath (Auth.) - Continuum Mechanics-Elsevier Inc, Academic Press (1994)Document599 pagesD. S. Chandrasekharaiah and Lokenath Debnath (Auth.) - Continuum Mechanics-Elsevier Inc, Academic Press (1994)amit yadav93% (14)
- 1310 0241v1 PDFDocument341 pages1310 0241v1 PDFMefNo ratings yet
- VA1 Graphsandmotionmaps APNDocument2 pagesVA1 Graphsandmotionmaps APNJNo ratings yet
- Chemical Engineering Thermodynamics: Volumetric Properties of Pure FluidDocument20 pagesChemical Engineering Thermodynamics: Volumetric Properties of Pure FluidThurgah VshinyNo ratings yet
- Chapter #3Document24 pagesChapter #3kKhalid YousafNo ratings yet
- Civil Engineering - HGEDocument2 pagesCivil Engineering - HGEKristelle Anne GarciaNo ratings yet
- Chapter 2: Principle of Operation of An AccelerometerDocument5 pagesChapter 2: Principle of Operation of An AccelerometerENRIQUENo ratings yet
- ADAPT TN294 RC DFLTN Crack Ex 12Document7 pagesADAPT TN294 RC DFLTN Crack Ex 12CarsonBakerNo ratings yet
- Finite Element Analysis of Spreader Bar by Utilizing The Arrangement and Connection of PadeyesDocument21 pagesFinite Element Analysis of Spreader Bar by Utilizing The Arrangement and Connection of PadeyesrahulNo ratings yet
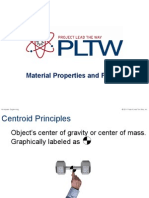
- Material Properties and Forces: © 2011 Project Lead The Way, Inc. Aerospace EngineeringDocument33 pagesMaterial Properties and Forces: © 2011 Project Lead The Way, Inc. Aerospace EngineeringAntonioNo ratings yet
- Class 10 - NVHDocument38 pagesClass 10 - NVHAmit SharmaNo ratings yet
- List of DP Phys WebsitesDocument7 pagesList of DP Phys Websitesapi-196482229No ratings yet
- EarthquakeGeotechnicalEngineeringDesign 1 PDFDocument391 pagesEarthquakeGeotechnicalEngineeringDesign 1 PDFGülnur Kayış100% (4)
- Analysis of RC Framed Structure With STR PDFDocument4 pagesAnalysis of RC Framed Structure With STR PDFJohn DávilaNo ratings yet
- Chapter 6 - Moment Distribution: Dr. C. CapraniDocument177 pagesChapter 6 - Moment Distribution: Dr. C. Capranihitendra_gk100% (2)
- Drive AxleDocument12 pagesDrive AxleDidier ÁlvarezNo ratings yet
- Seismic Analysis UBCDocument7 pagesSeismic Analysis UBCAnil kumar RNo ratings yet
- Choke SizingDocument6 pagesChoke SizingshervinyNo ratings yet
- Chapter 16 Problems-Applied Thermodynamics and Engineering 5th EditionDocument5 pagesChapter 16 Problems-Applied Thermodynamics and Engineering 5th EditionLudwig van RooyenNo ratings yet
- Step 2 Chassis 4WDDocument136 pagesStep 2 Chassis 4WDkaban_ayouuuNo ratings yet