
3-DC Motor Kontolü
3-DC Motor Kontolü
You might also like
- MODULE 1 - Introduction To Electrical DrivesDocument34 pagesMODULE 1 - Introduction To Electrical DrivesAshraf FauzanNo ratings yet
- MCQ DistributionDocument8 pagesMCQ Distributiongoyal.167009100% (3)
- SW-V2.1 1250 Service ManualDocument15 pagesSW-V2.1 1250 Service ManualByronD880% (2)
- Abc To DQDocument29 pagesAbc To DQKarThiNo ratings yet
- Electrical Drives 1: Week 1: Introduction To Drive SystemsDocument32 pagesElectrical Drives 1: Week 1: Introduction To Drive SystemsTran Duc TuanNo ratings yet
- Electric MotorDocument40 pagesElectric MotorhmiwukcyNo ratings yet
- DRIVES PPT45 - 16255 - EE424 - 2015 - 1 - 2 - 1 - Week 1Document12 pagesDRIVES PPT45 - 16255 - EE424 - 2015 - 1 - 2 - 1 - Week 1Prema Kumar NavuriNo ratings yet
- Brushless DC Motor PDFDocument21 pagesBrushless DC Motor PDFJaya KarthigaaNo ratings yet
- Module 2 - DC Motor DrivesDocument61 pagesModule 2 - DC Motor DrivesMohammad Amirul ShafiqNo ratings yet
- Special Purpose MotorsDocument16 pagesSpecial Purpose MotorsHari ReddyNo ratings yet
- BLDC MotorsDocument45 pagesBLDC Motorswicked_not_meNo ratings yet
- Dcmotor 121120082910 Phpapp01Document11 pagesDcmotor 121120082910 Phpapp01Faheem IjazNo ratings yet
- College of Engineering: - Topic: BLDC MotorDocument38 pagesCollege of Engineering: - Topic: BLDC MotorjitbakNo ratings yet
- Chapter - 1 DET5063 Combine pdf-1Document30 pagesChapter - 1 DET5063 Combine pdf-1Muhd FaizNo ratings yet
- Wind Energy Conversion SystemsDocument4 pagesWind Energy Conversion SystemsRudra palNo ratings yet
- Chapter 1 Intro To Electrical DrivesDocument76 pagesChapter 1 Intro To Electrical DrivesAfiq ZahinNo ratings yet
- Kaizen - Motor Selection GuideDocument11 pagesKaizen - Motor Selection Guideneerajkumar101No ratings yet
- Motor Selection Guide: A Kaizen Project: By: Jeff Andrus & Andrew FindlayDocument11 pagesMotor Selection Guide: A Kaizen Project: By: Jeff Andrus & Andrew Findlayabid azizNo ratings yet
- Sigma Institute of Engineering Department of Electrical Engineering Bakrol, VadodaraDocument52 pagesSigma Institute of Engineering Department of Electrical Engineering Bakrol, VadodaraBhavik PrajapatiNo ratings yet
- Brushless DDocument11 pagesBrushless DAkash NiwalNo ratings yet
- Brushless-DC-Motor 7027711 PowerpointDocument15 pagesBrushless-DC-Motor 7027711 PowerpointMalik Shahzeb AliNo ratings yet
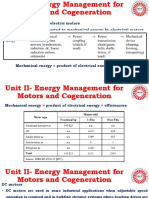
- Unit II Energy Management For Motors and CogenerationDocument7 pagesUnit II Energy Management For Motors and CogenerationLal Raja Singh RNo ratings yet
- Special Types of Machines & Microprocessor Based FunctionalDocument20 pagesSpecial Types of Machines & Microprocessor Based FunctionalSintiya TarannumNo ratings yet
- Group 6 - DC Motors PDFDocument22 pagesGroup 6 - DC Motors PDFRashen DilNo ratings yet
- Permanent Magnet DC MotorDocument7 pagesPermanent Magnet DC MotorJesse Jones Seraspe100% (1)
- Unit - IDocument23 pagesUnit - IshirishNo ratings yet
- Automation and Robotics - MODULE 4 - Santhosh AcharyaDocument76 pagesAutomation and Robotics - MODULE 4 - Santhosh AcharyaMadhusudhan N MNo ratings yet
- DC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document11 pagesDC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Aslam MohammadNo ratings yet
- EM2 C5 Special Purpose MotorsDocument19 pagesEM2 C5 Special Purpose Motorslucb2012913No ratings yet
- Brushless DC Motors: Presented by Kumaresan A (161me527) Moutheepan S (161me542)Document18 pagesBrushless DC Motors: Presented by Kumaresan A (161me527) Moutheepan S (161me542)Prakash RajNo ratings yet
- DC Motors and Generators: Electromechanical Energy Conversion - IDocument51 pagesDC Motors and Generators: Electromechanical Energy Conversion - IIBRAHIM ALJEHEFNo ratings yet
- Phy 121 Week 10 - DC & Ac CircuitsDocument152 pagesPhy 121 Week 10 - DC & Ac Circuitscezidi.2301985No ratings yet
- Term Paper On DC Motor:-: Name:-Deepshikha Verma Roll No: - RK6003B56 Section: - RK6003 Reg No: - 11011921Document16 pagesTerm Paper On DC Motor:-: Name:-Deepshikha Verma Roll No: - RK6003B56 Section: - RK6003 Reg No: - 11011921Deepshikha VermaNo ratings yet
- Drives Acdc - CNCDocument42 pagesDrives Acdc - CNCShami KunalNo ratings yet
- BLDC MotorDocument9 pagesBLDC MotorAnandan RamalingamNo ratings yet
- Special Purpose MotorsDocument16 pagesSpecial Purpose Motorskasparov001100% (1)
- BLDC MotorsDocument37 pagesBLDC MotorsCursed to DefyNo ratings yet
- EM ch-9 DC MOTORS AND GENERATORSDocument65 pagesEM ch-9 DC MOTORS AND GENERATORSmuhammad.anas2007No ratings yet
- Electric Vehicle Powertrains Session 14Document15 pagesElectric Vehicle Powertrains Session 14praneshr196No ratings yet
- Chapter 1Document45 pagesChapter 1tebelayhabitamu12No ratings yet
- DC Motors: PresenterDocument18 pagesDC Motors: Presenter281720 ktr.pg.mtron.18No ratings yet
- Classification of Electric Motors: Electrical Motors Basic ComponentsDocument89 pagesClassification of Electric Motors: Electrical Motors Basic ComponentsSarada Sankar DasNo ratings yet
- AC Drives - 2019 PDFDocument23 pagesAC Drives - 2019 PDFFady MichealNo ratings yet
- MOTORSDocument8 pagesMOTORSADESH TRIVEDINo ratings yet
- DC Motors and Generators Chapter # 9Document13 pagesDC Motors and Generators Chapter # 9SamiNo ratings yet
- Unit - 2 SSDDocument85 pagesUnit - 2 SSDAkshat SaxenaNo ratings yet
- DC MotorsDocument18 pagesDC MotorsFairos ZakariahNo ratings yet
- 1.DC Motor Drives-Part1 Module 2 PDFDocument77 pages1.DC Motor Drives-Part1 Module 2 PDFsuvij ksNo ratings yet
- Spem NotesDocument43 pagesSpem Notesolalatom8No ratings yet
- E-Motor Technologies For Ev: Motors, Controllers and DriversDocument41 pagesE-Motor Technologies For Ev: Motors, Controllers and Driversvarun sharmaNo ratings yet
- MCT 5.1Document70 pagesMCT 5.1Alfred CheriyanNo ratings yet
- Lecture No 2Document25 pagesLecture No 2Walid salamaNo ratings yet
- Satya Seminar TopicDocument18 pagesSatya Seminar TopicSatya raoNo ratings yet
- DC MotorDocument45 pagesDC MotorRayz C.ONo ratings yet
- Akshaya Bharathi Institute of Technology: R.S. Nagar, Siddavatam, Kadapa (Dist)Document13 pagesAkshaya Bharathi Institute of Technology: R.S. Nagar, Siddavatam, Kadapa (Dist)zilanimeisterNo ratings yet
- Energy Conversion in DC Motors - Series DC MotorDocument11 pagesEnergy Conversion in DC Motors - Series DC MotorMarc Jairro GajudoNo ratings yet
- Iam PPT FHD MotorsDocument25 pagesIam PPT FHD MotorsShreeNo ratings yet
- UNIT-3 Robot Drive MechanisamDocument82 pagesUNIT-3 Robot Drive MechanisamChetuNo ratings yet
- DKM AC CatalogueDocument65 pagesDKM AC Cataloguejlruiz06No ratings yet
- DC Motors: PresenterDocument18 pagesDC Motors: Presenterوسيم الزهرانيNo ratings yet
- Manual Robotics 1Document103 pagesManual Robotics 1DeekshaomarNo ratings yet
- Robot Mechanisms and Mechanical Devices IllustratedFrom EverandRobot Mechanisms and Mechanical Devices IllustratedRating: 4 out of 5 stars4/5 (1)
- Zero Speed Switch Working Principle Instrumentation ToolsDocument3 pagesZero Speed Switch Working Principle Instrumentation Toolsersanjeeb_456100% (1)
- Fluke 5500a-Coil Inst SheetDocument2 pagesFluke 5500a-Coil Inst SheetasNo ratings yet
- MV SkidDocument4 pagesMV SkidJordan AndradeNo ratings yet
- Car & Marine Audio: Superb - Give Your Music A New Expression!Document13 pagesCar & Marine Audio: Superb - Give Your Music A New Expression!taseas aivaNo ratings yet
- Fieldvue DVC6000 Series Digital Valve ControllersDocument12 pagesFieldvue DVC6000 Series Digital Valve ControllersSebas RuzoNo ratings yet
- Protective Relay RS 2001: Operating Instructions BA59/07Document12 pagesProtective Relay RS 2001: Operating Instructions BA59/07raza239No ratings yet
- Approved By: - : Alejandro Q. MaulionDocument1 pageApproved By: - : Alejandro Q. Maulionreniel fabroNo ratings yet
- Electric Quarter Turn Actuator: Flange F04 F05 F07Document2 pagesElectric Quarter Turn Actuator: Flange F04 F05 F07melad yousefNo ratings yet
- Arcteq AQ200 Product Catalogue 1.4ENGLISH WebDocument32 pagesArcteq AQ200 Product Catalogue 1.4ENGLISH WebMarliton SalinasNo ratings yet
- Operator & Installation Manual Tr-810 857645Document50 pagesOperator & Installation Manual Tr-810 857645बासुदेव अर्यालNo ratings yet
- Micromaster 440: 0,12 KW - 250 KWDocument78 pagesMicromaster 440: 0,12 KW - 250 KWadiNo ratings yet
- IntelliSAW IRM READER - DatasheetDocument4 pagesIntelliSAW IRM READER - DatasheetMarco CornelioNo ratings yet
- Coulometry and ElectrogravimetryDocument36 pagesCoulometry and ElectrogravimetryFaiza AnsariNo ratings yet
- Genset PDFDocument63 pagesGenset PDFkartik kapoorNo ratings yet
- EENGDocument4 pagesEENGrbNo ratings yet
- Silicon NPN Power Transistors: Savantic Semiconductor Product SpecificationDocument3 pagesSilicon NPN Power Transistors: Savantic Semiconductor Product Specificationolalekan jimohNo ratings yet
- As 3Document2 pagesAs 3Trip Adler100% (3)
- Ec100 Model Question Paper With AnswersDocument35 pagesEc100 Model Question Paper With AnswersSanjay P NambiarNo ratings yet
- Fast Decoupled State Estimation For Distribution Networks Considering Branch Ampere MeasurementsDocument4 pagesFast Decoupled State Estimation For Distribution Networks Considering Branch Ampere MeasurementsJesus Ortiz LNo ratings yet
- Lab11b - SERVO TRAINER 4 Proportional Plus Integral Control of Servo Trainer SpeedDocument11 pagesLab11b - SERVO TRAINER 4 Proportional Plus Integral Control of Servo Trainer Speedsairafi100% (3)
- EMI Failure Analysis Techniques: I. Frequency Spectrum AnalysisDocument6 pagesEMI Failure Analysis Techniques: I. Frequency Spectrum Analysislaa1978No ratings yet
- Chapter 15 Magnetic CircuitsDocument2 pagesChapter 15 Magnetic CircuitsNelson Naval CabingasNo ratings yet
- Commscope HBX 4517ds1 VTMDocument2 pagesCommscope HBX 4517ds1 VTMMario LeónNo ratings yet
- Instructions: Explosion Proof Smoke Detector 30-3013Document18 pagesInstructions: Explosion Proof Smoke Detector 30-3013Farid Silman WinstanleyNo ratings yet
- DI67Document3 pagesDI67Erln LimaNo ratings yet
- 4 Standards For AC Motors PDFDocument37 pages4 Standards For AC Motors PDFEdú BrizuelaNo ratings yet






















































































Download as pdf or txt
You might also like
- MODULE 1 - Introduction To Electrical DrivesDocument34 pagesMODULE 1 - Introduction To Electrical DrivesAshraf FauzanNo ratings yet
- MCQ DistributionDocument8 pagesMCQ Distributiongoyal.167009100% (3)
- SW-V2.1 1250 Service ManualDocument15 pagesSW-V2.1 1250 Service ManualByronD880% (2)
- Abc To DQDocument29 pagesAbc To DQKarThiNo ratings yet
- Electrical Drives 1: Week 1: Introduction To Drive SystemsDocument32 pagesElectrical Drives 1: Week 1: Introduction To Drive SystemsTran Duc TuanNo ratings yet
- Electric MotorDocument40 pagesElectric MotorhmiwukcyNo ratings yet
- DRIVES PPT45 - 16255 - EE424 - 2015 - 1 - 2 - 1 - Week 1Document12 pagesDRIVES PPT45 - 16255 - EE424 - 2015 - 1 - 2 - 1 - Week 1Prema Kumar NavuriNo ratings yet
- Brushless DC Motor PDFDocument21 pagesBrushless DC Motor PDFJaya KarthigaaNo ratings yet
- Module 2 - DC Motor DrivesDocument61 pagesModule 2 - DC Motor DrivesMohammad Amirul ShafiqNo ratings yet
- Special Purpose MotorsDocument16 pagesSpecial Purpose MotorsHari ReddyNo ratings yet
- BLDC MotorsDocument45 pagesBLDC Motorswicked_not_meNo ratings yet
- Dcmotor 121120082910 Phpapp01Document11 pagesDcmotor 121120082910 Phpapp01Faheem IjazNo ratings yet
- College of Engineering: - Topic: BLDC MotorDocument38 pagesCollege of Engineering: - Topic: BLDC MotorjitbakNo ratings yet
- Chapter - 1 DET5063 Combine pdf-1Document30 pagesChapter - 1 DET5063 Combine pdf-1Muhd FaizNo ratings yet
- Wind Energy Conversion SystemsDocument4 pagesWind Energy Conversion SystemsRudra palNo ratings yet
- Chapter 1 Intro To Electrical DrivesDocument76 pagesChapter 1 Intro To Electrical DrivesAfiq ZahinNo ratings yet
- Kaizen - Motor Selection GuideDocument11 pagesKaizen - Motor Selection Guideneerajkumar101No ratings yet
- Motor Selection Guide: A Kaizen Project: By: Jeff Andrus & Andrew FindlayDocument11 pagesMotor Selection Guide: A Kaizen Project: By: Jeff Andrus & Andrew Findlayabid azizNo ratings yet
- Sigma Institute of Engineering Department of Electrical Engineering Bakrol, VadodaraDocument52 pagesSigma Institute of Engineering Department of Electrical Engineering Bakrol, VadodaraBhavik PrajapatiNo ratings yet
- Brushless DDocument11 pagesBrushless DAkash NiwalNo ratings yet
- Brushless-DC-Motor 7027711 PowerpointDocument15 pagesBrushless-DC-Motor 7027711 PowerpointMalik Shahzeb AliNo ratings yet
- Unit II Energy Management For Motors and CogenerationDocument7 pagesUnit II Energy Management For Motors and CogenerationLal Raja Singh RNo ratings yet
- Special Types of Machines & Microprocessor Based FunctionalDocument20 pagesSpecial Types of Machines & Microprocessor Based FunctionalSintiya TarannumNo ratings yet
- Group 6 - DC Motors PDFDocument22 pagesGroup 6 - DC Motors PDFRashen DilNo ratings yet
- Permanent Magnet DC MotorDocument7 pagesPermanent Magnet DC MotorJesse Jones Seraspe100% (1)
- Unit - IDocument23 pagesUnit - IshirishNo ratings yet
- Automation and Robotics - MODULE 4 - Santhosh AcharyaDocument76 pagesAutomation and Robotics - MODULE 4 - Santhosh AcharyaMadhusudhan N MNo ratings yet
- DC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document11 pagesDC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Aslam MohammadNo ratings yet
- EM2 C5 Special Purpose MotorsDocument19 pagesEM2 C5 Special Purpose Motorslucb2012913No ratings yet
- Brushless DC Motors: Presented by Kumaresan A (161me527) Moutheepan S (161me542)Document18 pagesBrushless DC Motors: Presented by Kumaresan A (161me527) Moutheepan S (161me542)Prakash RajNo ratings yet
- DC Motors and Generators: Electromechanical Energy Conversion - IDocument51 pagesDC Motors and Generators: Electromechanical Energy Conversion - IIBRAHIM ALJEHEFNo ratings yet
- Phy 121 Week 10 - DC & Ac CircuitsDocument152 pagesPhy 121 Week 10 - DC & Ac Circuitscezidi.2301985No ratings yet
- Term Paper On DC Motor:-: Name:-Deepshikha Verma Roll No: - RK6003B56 Section: - RK6003 Reg No: - 11011921Document16 pagesTerm Paper On DC Motor:-: Name:-Deepshikha Verma Roll No: - RK6003B56 Section: - RK6003 Reg No: - 11011921Deepshikha VermaNo ratings yet
- Drives Acdc - CNCDocument42 pagesDrives Acdc - CNCShami KunalNo ratings yet
- BLDC MotorDocument9 pagesBLDC MotorAnandan RamalingamNo ratings yet
- Special Purpose MotorsDocument16 pagesSpecial Purpose Motorskasparov001100% (1)
- BLDC MotorsDocument37 pagesBLDC MotorsCursed to DefyNo ratings yet
- EM ch-9 DC MOTORS AND GENERATORSDocument65 pagesEM ch-9 DC MOTORS AND GENERATORSmuhammad.anas2007No ratings yet
- Electric Vehicle Powertrains Session 14Document15 pagesElectric Vehicle Powertrains Session 14praneshr196No ratings yet
- Chapter 1Document45 pagesChapter 1tebelayhabitamu12No ratings yet
- DC Motors: PresenterDocument18 pagesDC Motors: Presenter281720 ktr.pg.mtron.18No ratings yet
- Classification of Electric Motors: Electrical Motors Basic ComponentsDocument89 pagesClassification of Electric Motors: Electrical Motors Basic ComponentsSarada Sankar DasNo ratings yet
- AC Drives - 2019 PDFDocument23 pagesAC Drives - 2019 PDFFady MichealNo ratings yet
- MOTORSDocument8 pagesMOTORSADESH TRIVEDINo ratings yet
- DC Motors and Generators Chapter # 9Document13 pagesDC Motors and Generators Chapter # 9SamiNo ratings yet
- Unit - 2 SSDDocument85 pagesUnit - 2 SSDAkshat SaxenaNo ratings yet
- DC MotorsDocument18 pagesDC MotorsFairos ZakariahNo ratings yet
- 1.DC Motor Drives-Part1 Module 2 PDFDocument77 pages1.DC Motor Drives-Part1 Module 2 PDFsuvij ksNo ratings yet
- Spem NotesDocument43 pagesSpem Notesolalatom8No ratings yet
- E-Motor Technologies For Ev: Motors, Controllers and DriversDocument41 pagesE-Motor Technologies For Ev: Motors, Controllers and Driversvarun sharmaNo ratings yet
- MCT 5.1Document70 pagesMCT 5.1Alfred CheriyanNo ratings yet
- Lecture No 2Document25 pagesLecture No 2Walid salamaNo ratings yet
- Satya Seminar TopicDocument18 pagesSatya Seminar TopicSatya raoNo ratings yet
- DC MotorDocument45 pagesDC MotorRayz C.ONo ratings yet
- Akshaya Bharathi Institute of Technology: R.S. Nagar, Siddavatam, Kadapa (Dist)Document13 pagesAkshaya Bharathi Institute of Technology: R.S. Nagar, Siddavatam, Kadapa (Dist)zilanimeisterNo ratings yet
- Energy Conversion in DC Motors - Series DC MotorDocument11 pagesEnergy Conversion in DC Motors - Series DC MotorMarc Jairro GajudoNo ratings yet
- Iam PPT FHD MotorsDocument25 pagesIam PPT FHD MotorsShreeNo ratings yet
- UNIT-3 Robot Drive MechanisamDocument82 pagesUNIT-3 Robot Drive MechanisamChetuNo ratings yet
- DKM AC CatalogueDocument65 pagesDKM AC Cataloguejlruiz06No ratings yet
- DC Motors: PresenterDocument18 pagesDC Motors: Presenterوسيم الزهرانيNo ratings yet
- Manual Robotics 1Document103 pagesManual Robotics 1DeekshaomarNo ratings yet
- Robot Mechanisms and Mechanical Devices IllustratedFrom EverandRobot Mechanisms and Mechanical Devices IllustratedRating: 4 out of 5 stars4/5 (1)
- Zero Speed Switch Working Principle Instrumentation ToolsDocument3 pagesZero Speed Switch Working Principle Instrumentation Toolsersanjeeb_456100% (1)
- Fluke 5500a-Coil Inst SheetDocument2 pagesFluke 5500a-Coil Inst SheetasNo ratings yet
- MV SkidDocument4 pagesMV SkidJordan AndradeNo ratings yet
- Car & Marine Audio: Superb - Give Your Music A New Expression!Document13 pagesCar & Marine Audio: Superb - Give Your Music A New Expression!taseas aivaNo ratings yet
- Fieldvue DVC6000 Series Digital Valve ControllersDocument12 pagesFieldvue DVC6000 Series Digital Valve ControllersSebas RuzoNo ratings yet
- Protective Relay RS 2001: Operating Instructions BA59/07Document12 pagesProtective Relay RS 2001: Operating Instructions BA59/07raza239No ratings yet
- Approved By: - : Alejandro Q. MaulionDocument1 pageApproved By: - : Alejandro Q. Maulionreniel fabroNo ratings yet
- Electric Quarter Turn Actuator: Flange F04 F05 F07Document2 pagesElectric Quarter Turn Actuator: Flange F04 F05 F07melad yousefNo ratings yet
- Arcteq AQ200 Product Catalogue 1.4ENGLISH WebDocument32 pagesArcteq AQ200 Product Catalogue 1.4ENGLISH WebMarliton SalinasNo ratings yet
- Operator & Installation Manual Tr-810 857645Document50 pagesOperator & Installation Manual Tr-810 857645बासुदेव अर्यालNo ratings yet
- Micromaster 440: 0,12 KW - 250 KWDocument78 pagesMicromaster 440: 0,12 KW - 250 KWadiNo ratings yet
- IntelliSAW IRM READER - DatasheetDocument4 pagesIntelliSAW IRM READER - DatasheetMarco CornelioNo ratings yet
- Coulometry and ElectrogravimetryDocument36 pagesCoulometry and ElectrogravimetryFaiza AnsariNo ratings yet
- Genset PDFDocument63 pagesGenset PDFkartik kapoorNo ratings yet
- EENGDocument4 pagesEENGrbNo ratings yet
- Silicon NPN Power Transistors: Savantic Semiconductor Product SpecificationDocument3 pagesSilicon NPN Power Transistors: Savantic Semiconductor Product Specificationolalekan jimohNo ratings yet
- As 3Document2 pagesAs 3Trip Adler100% (3)
- Ec100 Model Question Paper With AnswersDocument35 pagesEc100 Model Question Paper With AnswersSanjay P NambiarNo ratings yet
- Fast Decoupled State Estimation For Distribution Networks Considering Branch Ampere MeasurementsDocument4 pagesFast Decoupled State Estimation For Distribution Networks Considering Branch Ampere MeasurementsJesus Ortiz LNo ratings yet
- Lab11b - SERVO TRAINER 4 Proportional Plus Integral Control of Servo Trainer SpeedDocument11 pagesLab11b - SERVO TRAINER 4 Proportional Plus Integral Control of Servo Trainer Speedsairafi100% (3)
- EMI Failure Analysis Techniques: I. Frequency Spectrum AnalysisDocument6 pagesEMI Failure Analysis Techniques: I. Frequency Spectrum Analysislaa1978No ratings yet
- Chapter 15 Magnetic CircuitsDocument2 pagesChapter 15 Magnetic CircuitsNelson Naval CabingasNo ratings yet
- Commscope HBX 4517ds1 VTMDocument2 pagesCommscope HBX 4517ds1 VTMMario LeónNo ratings yet
- Instructions: Explosion Proof Smoke Detector 30-3013Document18 pagesInstructions: Explosion Proof Smoke Detector 30-3013Farid Silman WinstanleyNo ratings yet
- DI67Document3 pagesDI67Erln LimaNo ratings yet
- 4 Standards For AC Motors PDFDocument37 pages4 Standards For AC Motors PDFEdú BrizuelaNo ratings yet