Download as pdf or txt
You might also like
- Especificaciones 226-B CAT Engine 3024CDocument9 pagesEspecificaciones 226-B CAT Engine 3024CRASMAJON91% (11)
- Instantaneous Centre Method NotesDocument9 pagesInstantaneous Centre Method NotesBrian GithinjiNo ratings yet
- 2 Velocity and AccelerationDocument28 pages2 Velocity and AccelerationAbdur RahmanNo ratings yet
- KOM Unit 2Document29 pagesKOM Unit 2Ahmed Sobhi l أحمد صبحيNo ratings yet
- Instantaneous Centre MethodDocument30 pagesInstantaneous Centre Methodm_er100No ratings yet
- Velocity Analysis IDocument41 pagesVelocity Analysis IDanialNo ratings yet
- Unit-I Tom Part IiDocument11 pagesUnit-I Tom Part Iickartik925No ratings yet
- Velocity AnalysisDocument12 pagesVelocity Analysisniaz kilamNo ratings yet
- Velocity in Mechanisms: Instantaneous Centre MethodDocument17 pagesVelocity in Mechanisms: Instantaneous Centre MethodDrew LadlowNo ratings yet
- Unit 2Document16 pagesUnit 2VENKATESHNo ratings yet
- Kinematics & Theory of MachinesDocument10 pagesKinematics & Theory of MachinesMoli DuttaNo ratings yet
- Velocity Analysis by Instantaneous Centre MethodDocument7 pagesVelocity Analysis by Instantaneous Centre Methodm elangoNo ratings yet
- Kinematics of Machines Unit - Ii Velocity Analysis Absolute Velocity: Velocity of A Point With Respect To A Fixed Point (Zero Velocity Point)Document9 pagesKinematics of Machines Unit - Ii Velocity Analysis Absolute Velocity: Velocity of A Point With Respect To A Fixed Point (Zero Velocity Point)Jagadeesh Babu VadapalliNo ratings yet
- Instantaneous Center of Zero VelocityDocument15 pagesInstantaneous Center of Zero Velocitym_er100No ratings yet
- Instantaneous Centre Method-Velocity at A Point: An Alternative Approach To The Relative Velocity MethodDocument61 pagesInstantaneous Centre Method-Velocity at A Point: An Alternative Approach To The Relative Velocity MethodKarthikeyanRamanujamNo ratings yet
- Velocity Analysis-Instantaneous Center MDocument7 pagesVelocity Analysis-Instantaneous Center MSuman_SamadderNo ratings yet
- Position Vector: OrientationDocument37 pagesPosition Vector: OrientationKarthikeyanRamanujamNo ratings yet
- CHP 22Document13 pagesCHP 22Abhiram Reddy100% (1)
- Em - 5 Part 2Document21 pagesEm - 5 Part 2Asha AsokNo ratings yet
- Lec 11Document17 pagesLec 11Pratyush MishraNo ratings yet
- MECH223 - Final LEcture No. 1 (Plane Motion of Rigid Bodies)Document20 pagesMECH223 - Final LEcture No. 1 (Plane Motion of Rigid Bodies)Ibo, Kim CaesarNo ratings yet
- Lect Acceleration Analysis - GraphicalDocument63 pagesLect Acceleration Analysis - GraphicalRayan IsranNo ratings yet
- Dynamics Lecture No 13Document44 pagesDynamics Lecture No 13G Gfr YMaNo ratings yet
- MCE 312 Lecture Note (Module 2)Document29 pagesMCE 312 Lecture Note (Module 2)Ahmed Mohamed SalihNo ratings yet
- MCE 312 Lecture Note (Module 2)Document29 pagesMCE 312 Lecture Note (Module 2)jagpreetNo ratings yet
- Lec 11Document17 pagesLec 11mukesh3021No ratings yet
- GEC 241 Week 7 NoteDocument5 pagesGEC 241 Week 7 Notesamtarrayo4No ratings yet
- KDM 6Document54 pagesKDM 6KarthikeyanRamanujamNo ratings yet
- 2 - Kinematics of Mechanisms - Instantaneous Center MethodDocument4 pages2 - Kinematics of Mechanisms - Instantaneous Center MethodGaurav GuptaNo ratings yet
- Mechanical Principles Outcome 4 - Mechanical Power Transmission Tutorial 3 - Linkage MechanismsDocument11 pagesMechanical Principles Outcome 4 - Mechanical Power Transmission Tutorial 3 - Linkage MechanismscataiceNo ratings yet
- I CentreDocument7 pagesI CentreO.p. BrarNo ratings yet
- EM Lecture Notes Module-5Document36 pagesEM Lecture Notes Module-5elinNo ratings yet
- Kom Unit 2Document24 pagesKom Unit 2Muthuvel M100% (3)
- Instantaneous Center of Zero VelocityDocument15 pagesInstantaneous Center of Zero VelocityIrteza HossainNo ratings yet
- KOM Unit IIDocument68 pagesKOM Unit IIVinoth KumarNo ratings yet
- Kinematics of Rotational MotionDocument10 pagesKinematics of Rotational MotionCesska EloisseNo ratings yet
- Planar Kinematics of Rigid Body NotesDocument79 pagesPlanar Kinematics of Rigid Body NotesYadanaNo ratings yet
- Planar Kinematics of A Rigid BodyDocument40 pagesPlanar Kinematics of A Rigid BodyZoker_45No ratings yet
- Machine Elements 1 002Document19 pagesMachine Elements 1 002MelindaNo ratings yet
- Elements of Mechanism Work Book and Lab ManualDocument105 pagesElements of Mechanism Work Book and Lab ManualMelinda100% (1)
- Displacement, Velocity and Acceleration Analysis of Plane Mechanisms Study Notes For Mechanical EngineeringDocument151 pagesDisplacement, Velocity and Acceleration Analysis of Plane Mechanisms Study Notes For Mechanical EngineeringDeepam SharmaNo ratings yet
- KIN Ematic Analysis of Planar MotionDocument42 pagesKIN Ematic Analysis of Planar MotionVikrant KumarNo ratings yet
- Chapter 16 Planar Kinematics of Rigid BodyDocument51 pagesChapter 16 Planar Kinematics of Rigid BodyDawood AbdullahNo ratings yet
- Chapter 16 Planar Kinematics of Rigid BodyDocument52 pagesChapter 16 Planar Kinematics of Rigid BodyMuhd HaqimNo ratings yet
- Cam and FollowersDocument29 pagesCam and Followerskefiyalew agegnNo ratings yet
- Chapter 16: Planar Kinematics of A Rigid BodyDocument58 pagesChapter 16: Planar Kinematics of A Rigid BodyineedchemicalxNo ratings yet
- Kinematics of Rigid BodyDocument6 pagesKinematics of Rigid BodyKhairul YahyahNo ratings yet
- 3.0 Wrap Up and SummaryDocument4 pages3.0 Wrap Up and SummaryGian SanchezNo ratings yet
- CH 16Document60 pagesCH 16Abdallah OdeibatNo ratings yet
- Unit IiDocument37 pagesUnit IiDamotharan Sathesh KumarNo ratings yet
- Lect Acceleration AnalysisDocument107 pagesLect Acceleration AnalysisTalha Khanzada100% (1)
- 6 DynamicsDocument93 pages6 Dynamicsmurada_7No ratings yet
- Part 2: Dynamics: Chapter No 16Document54 pagesPart 2: Dynamics: Chapter No 16Farhan ShahriarNo ratings yet
- EN4 Notes - Kinematics of Rigid BodiesDocument8 pagesEN4 Notes - Kinematics of Rigid BodiesaeropaschalNo ratings yet
- Lecture 3 Aerodynamics Some Fundamental Principles and EquationsDocument47 pagesLecture 3 Aerodynamics Some Fundamental Principles and EquationsKaleab TekabeNo ratings yet
- Rotation About A Fixed PointDocument31 pagesRotation About A Fixed PointGooftilaaAniJiraachuunkooYesusiinNo ratings yet
- 03 Kinematics III UpdatedDocument26 pages03 Kinematics III Updatedadeshinasamuel017No ratings yet
- Module 3 - Plane MotionDocument54 pagesModule 3 - Plane MotionNirav MachhiNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Documents 2Document8 pagesDocuments 2Diana NjelesaniNo ratings yet
- Tribology Test 1 2023Document5 pagesTribology Test 1 2023Diana NjelesaniNo ratings yet
- Turbo Test 1 2023Document2 pagesTurbo Test 1 2023Diana NjelesaniNo ratings yet
- Heat and Mass Test 1 2023Document2 pagesHeat and Mass Test 1 2023Diana NjelesaniNo ratings yet
- EM 411 Term 3 Assignment 2022 2023Document2 pagesEM 411 Term 3 Assignment 2022 2023Diana NjelesaniNo ratings yet
- Spring DesignDocument35 pagesSpring DesignDiana NjelesaniNo ratings yet
- 470 Test 1 2023Document2 pages470 Test 1 2023Diana NjelesaniNo ratings yet
- MA 411 Test 2Document3 pagesMA 411 Test 2Diana NjelesaniNo ratings yet
- Reverse Osmosis Desalination Plant in Nuweiba City (Case Study)Document16 pagesReverse Osmosis Desalination Plant in Nuweiba City (Case Study)RonaldNo ratings yet
- SG17V08EDocument2 pagesSG17V08EAndres HuertasNo ratings yet
- The Circular Economy Solution To Plastic Pollution July 2020Document15 pagesThe Circular Economy Solution To Plastic Pollution July 2020MY SustaZenNo ratings yet
- Technical Specification El Adm 137 12Document50 pagesTechnical Specification El Adm 137 12palgvenuNo ratings yet
- Builder - Jan 2015Document190 pagesBuilder - Jan 2015Ashok Subramaniyan100% (1)
- Toyota LumberginyDocument17 pagesToyota LumberginyBiniyam BekeleNo ratings yet
- ST - 13.06 Steam Traps, Seal Water and Service Piping ArrangementsDocument29 pagesST - 13.06 Steam Traps, Seal Water and Service Piping ArrangementsMaksim.em001No ratings yet
- Actuador Electrico AutomaxDocument12 pagesActuador Electrico AutomaxLuis Guerra VegaNo ratings yet
- 002 Prime-G+ Commercial PerformanceDocument18 pages002 Prime-G+ Commercial Performancesameerjp50% (2)
- Cleanroom Energy EfficiencyDocument6 pagesCleanroom Energy EfficiencysdvitkoNo ratings yet
- PAS2080 FinalDownloadDocument68 pagesPAS2080 FinalDownloadAnkit PandeyNo ratings yet
- Tarifa SD MachDocument28 pagesTarifa SD MachBac Viet NguyenNo ratings yet
- Grove Gear Products Catalog 8050Document436 pagesGrove Gear Products Catalog 8050fsijestNo ratings yet
- Fishing Tool Manual: Oil Field Services DivisionDocument162 pagesFishing Tool Manual: Oil Field Services DivisionAboozar FathinejadNo ratings yet
- The Quantum-Mechanical Model of The Atom: Principles of Chemistry: A Molecular Approach, 1Document77 pagesThe Quantum-Mechanical Model of The Atom: Principles of Chemistry: A Molecular Approach, 1ynottripNo ratings yet
- Biffi Atuador PneumaticoDocument4 pagesBiffi Atuador PneumaticoAnderson SiqueiraNo ratings yet
- J250R Breaker EnclosureDocument1 pageJ250R Breaker EnclosureBob HabNo ratings yet
- A4-P 13.0 enDocument13 pagesA4-P 13.0 enAtiq Ur RehmanNo ratings yet
- Single-Phase SSR With Detachable Heatsink: SR1 SeriesDocument2 pagesSingle-Phase SSR With Detachable Heatsink: SR1 Seriestechnical supportNo ratings yet
- TC66T Sea PDFDocument4 pagesTC66T Sea PDFjorge cornejoNo ratings yet
- Powerpoint - PHY01 - CO6 - Simple Harmonic Motion Waves and Sound 1Document46 pagesPowerpoint - PHY01 - CO6 - Simple Harmonic Motion Waves and Sound 1Angelika Valencia100% (1)
- NPLEX Biochem CarbsDocument1 pageNPLEX Biochem Carbsapi-26938624No ratings yet
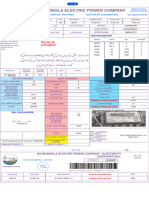
- Gepco Online Bill 2Document1 pageGepco Online Bill 2ARSHI SULAHRINo ratings yet
- Spec Tank ProcedureDocument2 pagesSpec Tank ProcedureCharles Robert McDonaldNo ratings yet
- JEE-Adv Grand Test Question Paper (P 1) - 14-05-2014Document24 pagesJEE-Adv Grand Test Question Paper (P 1) - 14-05-2014Ranjan PrasadNo ratings yet
- GroundhandlngDocument44 pagesGroundhandlnghuouinkyouma100% (1)
- Scientific Glass EquipmentDocument28 pagesScientific Glass EquipmentJuan P RuizNo ratings yet
- Electric Motor CatalogDocument68 pagesElectric Motor CatalogFayez Al-ahmadiNo ratings yet
- Synthesis and Consolidation of Boron Carbide A ReviewDocument37 pagesSynthesis and Consolidation of Boron Carbide A ReviewAlexandru PrisecaruNo ratings yet