Download as pdf or txt
You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- A Review Article On Integrator Circuits Using Various Active DevicesDocument7 pagesA Review Article On Integrator Circuits Using Various Active DevicesRaja ChandruNo ratings yet
- Rotary Tiller Desing Parameters Part 1 PDFDocument7 pagesRotary Tiller Desing Parameters Part 1 PDFJonathan Gonzalez Camargo100% (1)
- Rotor 52Document120 pagesRotor 52jaspertiemNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- National Advisory Committee For AeronauticsDocument26 pagesNational Advisory Committee For Aeronauticscepheid_luNo ratings yet
- Wind Tunnel Tests On A 12 FT Diameter Helicopter Rotor Squire 1953 Arc-Rm-2695Document21 pagesWind Tunnel Tests On A 12 FT Diameter Helicopter Rotor Squire 1953 Arc-Rm-2695Mariela TisseraNo ratings yet
- Aerodynamic Performance of A 0.27-Scale Model of An AH-64 Helicopter With Baseline andDocument24 pagesAerodynamic Performance of A 0.27-Scale Model of An AH-64 Helicopter With Baseline andSavage MasaruNo ratings yet
- NACA - High-Speed Kaman Rotochute - 1954Document20 pagesNACA - High-Speed Kaman Rotochute - 1954Anton EdigerNo ratings yet
- Design and Analysis Trends of Helicopter Rotor SystemsDocument40 pagesDesign and Analysis Trends of Helicopter Rotor SystemsHasan ÖzgenNo ratings yet
- RamasamyAHSF13 Corrected2Document23 pagesRamasamyAHSF13 Corrected2kalina.jovanovskiNo ratings yet
- National Advisory Committee For Aeronautics: Technical Note 3798Document34 pagesNational Advisory Committee For Aeronautics: Technical Note 3798Mariela TisseraNo ratings yet
- General Disclaimer One or More of The Following Statements May Affect This DocumentDocument14 pagesGeneral Disclaimer One or More of The Following Statements May Affect This DocumentUmair MunirNo ratings yet
- Active Flaps and Slats For Rotor Performance EnhancementDocument17 pagesActive Flaps and Slats For Rotor Performance EnhancementKumar RavichandranNo ratings yet
- Analytical Investigation of The Free-Tip Rotor For Helicopters NASA 81345 FIL FIL FILDocument34 pagesAnalytical Investigation of The Free-Tip Rotor For Helicopters NASA 81345 FIL FIL FILMariela TisseraNo ratings yet
- CFD Design Framework Barbely PDFDocument15 pagesCFD Design Framework Barbely PDFVikNo ratings yet
- NASA HelicopterDocument51 pagesNASA HelicopterRolando RivasNo ratings yet
- (2010) Suenmin Lee - Analysis of Aerodynamic Characteristics On A Counter-Rotating Wind TurbineDocument4 pages(2010) Suenmin Lee - Analysis of Aerodynamic Characteristics On A Counter-Rotating Wind TurbineYoledie MacapagalNo ratings yet
- Calculation of The Aerodynamic Behavior of The Tilt Rotor Aeroacoustic Model (TRAM) in The DNWDocument37 pagesCalculation of The Aerodynamic Behavior of The Tilt Rotor Aeroacoustic Model (TRAM) in The DNWTimothy JimNo ratings yet
- 2005 Renewable Energy WindDocument14 pages2005 Renewable Energy WindAhmed NasrNo ratings yet
- 20170000654Document12 pages20170000654tizio caglioNo ratings yet
- On The Torque Mechanism of Savonius Rotors: Nobuyuki FujisawaDocument16 pagesOn The Torque Mechanism of Savonius Rotors: Nobuyuki FujisawaMonica CanafNo ratings yet
- Vol1no1-6 GovardhanMDocument14 pagesVol1no1-6 GovardhanMSandra PowersNo ratings yet
- Designing and FEM Simulation of The Helicopter Rotor and HubDocument11 pagesDesigning and FEM Simulation of The Helicopter Rotor and HubAlper DedeNo ratings yet
- Numerical Simulation and Rotor Dynamic Stability Analysis On A Large-GRUPO 8Document8 pagesNumerical Simulation and Rotor Dynamic Stability Analysis On A Large-GRUPO 8Cristian Polo VallejosNo ratings yet
- Unsteady Velocity Measurements Taken Behind A Model Helicopter Rotor Hub in Forward FlightDocument248 pagesUnsteady Velocity Measurements Taken Behind A Model Helicopter Rotor Hub in Forward FlightHyunJoon, KimNo ratings yet
- NACA TN3237 - Hovering Performance of A Helicopter Rotor - Perfiles (Naca 8-H-12)Document15 pagesNACA TN3237 - Hovering Performance of A Helicopter Rotor - Perfiles (Naca 8-H-12)MB-RPNo ratings yet
- Effect of SizingDocument6 pagesEffect of Sizingbavin rajNo ratings yet
- Aeroelastic Stability For Straight and Swept-Tip Rotor BladesDocument17 pagesAeroelastic Stability For Straight and Swept-Tip Rotor BladesGökhan ÖzlüNo ratings yet
- Paulos CycleDocument35 pagesPaulos CycleBonar StepanusNo ratings yet
- Rotor Design Options For Improving Tiltrotor Whirl-Flutter Stability MarginsDocument9 pagesRotor Design Options For Improving Tiltrotor Whirl-Flutter Stability Margins雷黎明No ratings yet
- National Advisory Commi'I.I'Ee For Aeronautics: Afm:CDocument24 pagesNational Advisory Commi'I.I'Ee For Aeronautics: Afm:CdrumingeekNo ratings yet
- Synopsis TH 2113 - 166103030Document8 pagesSynopsis TH 2113 - 166103030Aaradhya YadavNo ratings yet
- A New Class of Rotary Piston Machine Suitable For Compressors, Pumps and Internal Combustion EnginesDocument18 pagesA New Class of Rotary Piston Machine Suitable For Compressors, Pumps and Internal Combustion Enginesconlib100% (1)
- Performance and Design Investigation of Heavy Lift Tiltrotor With Aerodynamic Interference EffectsDocument19 pagesPerformance and Design Investigation of Heavy Lift Tiltrotor With Aerodynamic Interference EffectsJr Zdenko VukojaNo ratings yet
- Analytical Design of Radial Turbine Design-NasaDocument162 pagesAnalytical Design of Radial Turbine Design-Nasamrbookani100% (1)
- Permanent Magnet Bias, Homopolar Magnetic Bearings For A 130 KW-HR Composite FlywheelDocument8 pagesPermanent Magnet Bias, Homopolar Magnetic Bearings For A 130 KW-HR Composite FlywheelAnonymous f3oWRCJNo ratings yet
- Axial FlowDocument11 pagesAxial FlowKtst EngNo ratings yet
- Simulacion NumericaDocument7 pagesSimulacion Numericajohansarache1986No ratings yet
- Main ShaftDocument7 pagesMain Shaftcosta59dac9242No ratings yet
- Savonius Blade Profile PDFDocument21 pagesSavonius Blade Profile PDFTushar KarekarNo ratings yet
- Nature Inspired Wind Turbine Blade DesignDocument21 pagesNature Inspired Wind Turbine Blade Design19MECH052 SYED YOUNUSNo ratings yet
- 01 - Experimental Analysis of Flow Structure in Contra-Rotating Axial Flow Pump Designed With Different Rotational Speed ConceptDocument7 pages01 - Experimental Analysis of Flow Structure in Contra-Rotating Axial Flow Pump Designed With Different Rotational Speed ConceptAhmetNo ratings yet
- Curvature and Twist of VAWTDocument16 pagesCurvature and Twist of VAWTBattle SagaNo ratings yet
- Fluid-Structure Interaction Study of Gas Turbine Blade VibrationsDocument9 pagesFluid-Structure Interaction Study of Gas Turbine Blade VibrationsAmbrish SinghNo ratings yet
- UH-60 Blackhawk NASA TestsDocument18 pagesUH-60 Blackhawk NASA TestsmaverickF15No ratings yet
- Wind Turbine Gearbox Technologies: April 2010Document19 pagesWind Turbine Gearbox Technologies: April 2010Adarsh ShindeNo ratings yet
- Effect of Rotor Profiles On The Torque of A Switched ReluctaDocument6 pagesEffect of Rotor Profiles On The Torque of A Switched Reluctaapi-19827661No ratings yet
- Axial Vibrations of A Marine Shaft Lines. Calculations Measurements ComparisonDocument10 pagesAxial Vibrations of A Marine Shaft Lines. Calculations Measurements ComparisonCojocaru TiberiuNo ratings yet
- A Comparison of Helicopter Main Rotor PDFDocument18 pagesA Comparison of Helicopter Main Rotor PDFMirkoD.InterbartoloNo ratings yet
- Experimental Investigation of Rotorcraft Outwash in Ground EffectDocument26 pagesExperimental Investigation of Rotorcraft Outwash in Ground Effectedward.granthamNo ratings yet
- The Effect of Rotor Blade Thickness and Surface Finish On The Erformance of A Small Axial Flow TurbineDocument16 pagesThe Effect of Rotor Blade Thickness and Surface Finish On The Erformance of A Small Axial Flow TurbinePeter IjaramendiNo ratings yet
- Solidity Study and Its Effects On The Performance of A Small Scale Horizontal Axis Wind TurbineDocument8 pagesSolidity Study and Its Effects On The Performance of A Small Scale Horizontal Axis Wind TurbineDEBAPRASAD PALNo ratings yet
- Fulltext 3Document6 pagesFulltext 3ijal84No ratings yet
- Umping Capacity of Pitched Blade Multi Stage Impellers: Tomáš JiroutDocument7 pagesUmping Capacity of Pitched Blade Multi Stage Impellers: Tomáš Jiroutthomas_v501925No ratings yet
- Propeller in Vortex RingDocument16 pagesPropeller in Vortex Ringmondy.egNo ratings yet
- Tidal TurbineDocument10 pagesTidal TurbineAdson Santos Silva Jr.No ratings yet
- Measurements of The Near Wake of A Rotor in Forward Flight: AIAA 98-0692Document10 pagesMeasurements of The Near Wake of A Rotor in Forward Flight: AIAA 98-0692Naveen NaviNo ratings yet
- Numerical Simulation of Horizontal Axis Wind Turbines With Vortex GeneratorsDocument10 pagesNumerical Simulation of Horizontal Axis Wind Turbines With Vortex GeneratorsPiotr AdamNo ratings yet
- Aerodynamic Performance of A Hex-Rotor Unmanned Aerial Vehicle With Different Rotor SpacingDocument8 pagesAerodynamic Performance of A Hex-Rotor Unmanned Aerial Vehicle With Different Rotor SpacingjuanNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Validation and Verification of ANSYS FLUENT Boiling CapabilitiesDocument22 pagesValidation and Verification of ANSYS FLUENT Boiling CapabilitiesMaximNo ratings yet
- Verification and Validation in CFD and Heat Transfer: ANSYS Practice and The New ASME StandardDocument22 pagesVerification and Validation in CFD and Heat Transfer: ANSYS Practice and The New ASME StandardMaxim100% (1)
- Lift Generation of Forward Flying Helicopters/rotorsDocument3 pagesLift Generation of Forward Flying Helicopters/rotorsMaximNo ratings yet
- Proposed cm-s-014 Modelling Simulation - For ConsultationDocument55 pagesProposed cm-s-014 Modelling Simulation - For ConsultationMaximNo ratings yet
- Washington, D.C. 20535: Section 552 Section 552aDocument59 pagesWashington, D.C. 20535: Section 552 Section 552aGenocea CfoNo ratings yet
- Lab Report DLD 2Document9 pagesLab Report DLD 2Amin QureshiNo ratings yet
- L76 PPP TNDocument2 pagesL76 PPP TNAlexei CarlesNo ratings yet
- National Textile UniversityDocument9 pagesNational Textile UniversityWaqas AkramNo ratings yet
- 3288.0-18 MHZ ReceiverDocument2 pages3288.0-18 MHZ ReceiverJoy MukherjiNo ratings yet
- Ban Ve Thang TQ Co PMDocument51 pagesBan Ve Thang TQ Co PMNguyễn VũNo ratings yet
- 02 - STD - 03 Pole Contactors - (2.01 - 2.02)Document2 pages02 - STD - 03 Pole Contactors - (2.01 - 2.02)ThilinaNo ratings yet
- Lab 07 To Understand The Transformation Ratio of AutotransformerDocument3 pagesLab 07 To Understand The Transformation Ratio of AutotransformerMuhammad MashamNo ratings yet
- Wiring & Connection Diagram SCU (Slurry Control Unit) 9549-162C-PVE-B-015-01Document39 pagesWiring & Connection Diagram SCU (Slurry Control Unit) 9549-162C-PVE-B-015-01C&I DarlipaliNo ratings yet
- EE C-15 5 and 6 PDFDocument332 pagesEE C-15 5 and 6 PDFpradeepNo ratings yet
- Mechanical 3rd Syllabus CsvtuDocument11 pagesMechanical 3rd Syllabus CsvtuTejasvi AnantNo ratings yet
- Produced Number Built Developed From National Origin Manufacturer First Flight StatusDocument4 pagesProduced Number Built Developed From National Origin Manufacturer First Flight StatusDario Alberto Lopez PesqueiraNo ratings yet
- Space Vector PWM Intro - SwitchcraftDocument28 pagesSpace Vector PWM Intro - SwitchcraftAnky KNo ratings yet
- UC3843 STMicroelectronicsDocument11 pagesUC3843 STMicroelectronicsDelcu MarinicaNo ratings yet
- Communications Systems - LBC 3432/02 Unidirectional Sound ProjectorDocument3 pagesCommunications Systems - LBC 3432/02 Unidirectional Sound ProjectorKevin Alexander RuizNo ratings yet
- NOVOMET. VSD Novomet Troubleshooting Manual. 480V. Rev. 1.01Document36 pagesNOVOMET. VSD Novomet Troubleshooting Manual. 480V. Rev. 1.01Klever AlvarezNo ratings yet
- Skema Laptop NB672Document22 pagesSkema Laptop NB672m. sochaNo ratings yet
- M10 Ota IiiDocument34 pagesM10 Ota IiifirpealNo ratings yet
- Manual 1492Document61 pagesManual 1492Kyle SorensenNo ratings yet
- Blank Sample WPS Form (SAW) Welding Procedure Specification (WPS)Document1 pageBlank Sample WPS Form (SAW) Welding Procedure Specification (WPS)GMNo ratings yet
- Safety Barier MTL7787Document1 pageSafety Barier MTL7787MESBAH ALAMOURINo ratings yet
- KY8T1P9BDocument5 pagesKY8T1P9BTamilarasan KNo ratings yet
- Power Electronics - QB - Final - PECDocument52 pagesPower Electronics - QB - Final - PECmanoj kumarNo ratings yet
- EE6352-Electrical Engineering and Instrumentation Unit II Question Bank NewDocument2 pagesEE6352-Electrical Engineering and Instrumentation Unit II Question Bank NewkarthikeyanNo ratings yet
- KBP005M Thru KBP10M, 3N246 Thru 3N252: Glass Passivated Single-Phase Bridge RectifierDocument3 pagesKBP005M Thru KBP10M, 3N246 Thru 3N252: Glass Passivated Single-Phase Bridge Rectifieranon_412893633No ratings yet
- Digital Electronics Chapter 3Document39 pagesDigital Electronics Chapter 3Pious TraderNo ratings yet
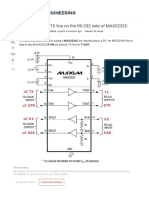
- Crosstalk From RX To TX Line On The RS-232 Side of MAX3232CDocument4 pagesCrosstalk From RX To TX Line On The RS-232 Side of MAX3232CTurkogluNo ratings yet
- WR Package 72-Lead QFN (10mm: (Reference LTC DWG # 05-08-1930 Rev A)Document1 pageWR Package 72-Lead QFN (10mm: (Reference LTC DWG # 05-08-1930 Rev A)Rodrigo BenitezNo ratings yet
- Biasing of PN Junction DiodeDocument24 pagesBiasing of PN Junction Diodegirishkumardarisi254No ratings yet