Download as pdf or txt
You might also like
- Lecture 5.0 - Spiral CurveDocument2 pagesLecture 5.0 - Spiral Curvermle50% (8)
- Solution of Mathematics SSC-II (3rd Set)Document7 pagesSolution of Mathematics SSC-II (3rd Set)Javaid100% (1)
- Giatay Na FinalDocument55 pagesGiatay Na FinalEstiven Gier33% (3)
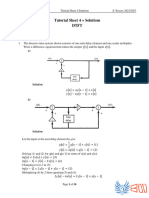
- Tutorial 4 SolutionsDocument10 pagesTutorial 4 Solutionssama abd elgelilNo ratings yet
- 2020 Spring MESF5450 E04 PDFDocument5 pages2020 Spring MESF5450 E04 PDFLit Pao WongNo ratings yet
- 2018 JuneDocument18 pages2018 Juneizzat razaliNo ratings yet
- Sta5 PrevDocument6 pagesSta5 PrevMuhammad Sadman Sakib khan100% (1)
- Solutions Assignment No 3Document16 pagesSolutions Assignment No 3Jahid HasanNo ratings yet
- Ejercicios ResueltosDocument3 pagesEjercicios ResueltosGonzalo Ventura HuayancaNo ratings yet
- FreddyAntonioEspejoSerrano A3Document13 pagesFreddyAntonioEspejoSerrano A3Freddy EspejoNo ratings yet
- 1.a Setting Up Table of Values: Assessment Task 2 SolutionDocument12 pages1.a Setting Up Table of Values: Assessment Task 2 SolutionJulie Grace Timario ObiedoNo ratings yet
- Ecuaciones-Diferenciales Ejercicios ResueltosDocument5 pagesEcuaciones-Diferenciales Ejercicios ResueltosMilda LeonNo ratings yet
- Ecvv U2 A3 Gier OoooDocument8 pagesEcvv U2 A3 Gier OoooGilberto EugenioNo ratings yet
- Ecvv U2 A3 Gier OoooeeeDocument8 pagesEcvv U2 A3 Gier Ooooeeebeto riveraNo ratings yet
- Midterm 1 SolutionsDocument6 pagesMidterm 1 SolutionsPranusha reddyNo ratings yet
- SPH410 Y2S2 2024 CAT 2 Marking SchemeDocument4 pagesSPH410 Y2S2 2024 CAT 2 Marking SchemeligawacalvinceNo ratings yet
- DOC. ADIC. Cp5Document19 pagesDOC. ADIC. Cp5yekel86460No ratings yet
- Imroatul Hudati (07111750020003) Tugas 1Document4 pagesImroatul Hudati (07111750020003) Tugas 1Argatha AlwinsyahNo ratings yet
- Answers-Chaks Pure Maths P2 Ex 1 Pure Mathematics0001Document13 pagesAnswers-Chaks Pure Maths P2 Ex 1 Pure Mathematics0001Michael MyamboNo ratings yet
- Mastery Notes 01 MESLDocument6 pagesMastery Notes 01 MESLMarlo SertimoNo ratings yet
- VizeDocument4 pagesVizeMehmet KayhanNo ratings yet
- Çıkmış Sorular - Removed - Removed - RemovedDocument25 pagesÇıkmış Sorular - Removed - Removed - Removedyusufcgyln2001No ratings yet
- Kunci Pembahasan Simulasi Pertama Tpa PPDS20220618070328Document4 pagesKunci Pembahasan Simulasi Pertama Tpa PPDS20220618070328Amalia AnnisakNo ratings yet
- Use The Lagrangian Formulation To Write Down The Equation of Motion in Matrix FormDocument24 pagesUse The Lagrangian Formulation To Write Down The Equation of Motion in Matrix FormThafer MajeedNo ratings yet
- Module 6 - Derivatives of Trigonometric FunctionsDocument2 pagesModule 6 - Derivatives of Trigonometric FunctionsCABALICAN, Jhoco Daniel R.No ratings yet
- MemoAss3G10 (A) G10 (B) Friday13h30Document1 pageMemoAss3G10 (A) G10 (B) Friday13h30Simphiwe BenyaNo ratings yet
- EndSem Jan2021Document2 pagesEndSem Jan2021Nithishkumar BaskerNo ratings yet
- Answer KeyDocument7 pagesAnswer KeyAsdf 9482No ratings yet
- MAT2002 Assignment 1Document4 pagesMAT2002 Assignment 1sigfried rigmundNo ratings yet
- Sol - Recuperatorio Calculo I 1-2023Document3 pagesSol - Recuperatorio Calculo I 1-2023Jair Flores MechanNo ratings yet
- Fourier Series in (-L, L)Document37 pagesFourier Series in (-L, L)vu1f2122093No ratings yet
- Learning Material 3 - Laplace Transformation Additional NotesDocument15 pagesLearning Material 3 - Laplace Transformation Additional NotesJade GurtizaNo ratings yet
- SOLUCIÓN - RECUPERATORIO - 2° Parcial 2023Document1 pageSOLUCIÓN - RECUPERATORIO - 2° Parcial 2023lourdes barriosNo ratings yet
- MAT102 Scheme 2024Document5 pagesMAT102 Scheme 2024ashwinharikumar56No ratings yet
- Cs301 Midterm PreparationDocument3 pagesCs301 Midterm Preparationnh6394866No ratings yet
- PEU 3301 - Final Examination 2020 - Solution Q5Document2 pagesPEU 3301 - Final Examination 2020 - Solution Q5mufihussain2000No ratings yet
- Quiz 1 EE 472 For UNLVDocument4 pagesQuiz 1 EE 472 For UNLVistraight1No ratings yet
- 3.4.1 Line IntegralDocument5 pages3.4.1 Line IntegralSyafiyatulMunawarahNo ratings yet
- Funciones Vectoriales 1 PDFDocument6 pagesFunciones Vectoriales 1 PDFdialmegoNo ratings yet
- CS131 Sample Paper SolutionsDocument5 pagesCS131 Sample Paper SolutionsJimmie RustlesNo ratings yet
- Trigonometry Formulae 1Document2 pagesTrigonometry Formulae 1aaditya9903No ratings yet
- Boundary Value Problem NumecDocument17 pagesBoundary Value Problem NumecshakiruNo ratings yet
- Math 1 Resit Solutions For Students 1Document12 pagesMath 1 Resit Solutions For Students 1jasperNo ratings yet
- Solution To Extra Problem Set 5Document13 pagesSolution To Extra Problem Set 5物理系小薯No ratings yet
- Second Summer 21 22Document8 pagesSecond Summer 21 22Galia Mohammad EssaNo ratings yet
- ACET December 2023 SolutionDocument10 pagesACET December 2023 Solutionomkarsutar9440No ratings yet
- AI AA SL Core Diagnostic Test Ch. 1 3-5 Suggested SolutionsDocument26 pagesAI AA SL Core Diagnostic Test Ch. 1 3-5 Suggested SolutionsAlexandr BostanNo ratings yet
- Notes - Fourier Series in (0,2l)Document20 pagesNotes - Fourier Series in (0,2l)vu1f2122093No ratings yet
- Analysis of Suspension Bridge Chapter 0 Parabola CableDocument7 pagesAnalysis of Suspension Bridge Chapter 0 Parabola CableSeungWoo LEENo ratings yet
- Unit 10Document3 pagesUnit 10Anonymous 0x2pwMCWgjNo ratings yet
- Worksheet Solution 1Document9 pagesWorksheet Solution 1abdelrahmanhelal13No ratings yet
- MTH122 (B)Document24 pagesMTH122 (B)ashleydavid652No ratings yet
- Practice Set 1 AnswersDocument2 pagesPractice Set 1 Answersvfmdxy2bmzNo ratings yet
- Numerical Analysis: (X) 0. +1 +1. +2. Which Is Required EquationDocument2 pagesNumerical Analysis: (X) 0. +1 +1. +2. Which Is Required EquationYoYo SamonNo ratings yet
- A' Level H2 Maths 2013 - Paper 1: MATHEMATICS (HIGHER 2) 9740/01Document12 pagesA' Level H2 Maths 2013 - Paper 1: MATHEMATICS (HIGHER 2) 9740/01Lawrence Lim Ah KowNo ratings yet
- Alevelh2maths2013paper1 PDFDocument12 pagesAlevelh2maths2013paper1 PDFLawrence Lim Ah KowNo ratings yet
- ED 2 ParcialDocument2 pagesED 2 ParcialVanessaVargasNo ratings yet
- Question 4 and 5 Adv MathDocument4 pagesQuestion 4 and 5 Adv Mathamirulken123No ratings yet
- Tugas Bab 8 Nomor 9 11 29 32Document2 pagesTugas Bab 8 Nomor 9 11 29 32Zero GravityNo ratings yet
- DerivadasDocument4 pagesDerivadasDiogo LimonesNo ratings yet
- TD1 Math3 SolutionDocument4 pagesTD1 Math3 Solutionanis - TvNo ratings yet
- John NapierDocument60 pagesJohn Napierrichardfisica100% (1)
- Chapter 9 - Geometry Practice WorksheetDocument9 pagesChapter 9 - Geometry Practice WorksheetRahul KarnaNo ratings yet
- Y1 - Module 2 - Constructing Geometrical FiguresDocument46 pagesY1 - Module 2 - Constructing Geometrical FiguresFrance Alvarez-AlipanteNo ratings yet
- Progress Check Unit 3A MCQ AnsDocument10 pagesProgress Check Unit 3A MCQ Ansryzewu2024No ratings yet
- Important Question: ICSE 2010 Mathematics Class 12 Solved (Definite Integrals)Document6 pagesImportant Question: ICSE 2010 Mathematics Class 12 Solved (Definite Integrals)Mathematics guidance expert Mousumi MaityNo ratings yet
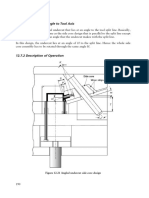
- 2undercuts at Angle To Tool Axis PDFDocument2 pages2undercuts at Angle To Tool Axis PDFnamNo ratings yet
- 7 NVS Final Math IADocument27 pages7 NVS Final Math IASungbeen Hong100% (1)
- Fourier Series BitsDocument16 pagesFourier Series BitsS AdilakshmiNo ratings yet
- Tutorial Free CAD OkDocument73 pagesTutorial Free CAD Okminossota0% (1)
- 8 3 RotationsDocument6 pages8 3 RotationsYASSIEN ELBANNANo ratings yet
- Grade 9 Algebra Common Core WorkbooksDocument3 pagesGrade 9 Algebra Common Core WorkbooksLindaNo ratings yet
- Disclosure To Promote The Right To Information: IS 5359 (1987) : Sine Bars (PGD 25: Engineering Metrology)Document9 pagesDisclosure To Promote The Right To Information: IS 5359 (1987) : Sine Bars (PGD 25: Engineering Metrology)ayariseifallahNo ratings yet
- Triangle Trigonometry: What This Module Is AboutDocument25 pagesTriangle Trigonometry: What This Module Is AboutisayblankNo ratings yet
- Mathematics For Grade 3 TeachersDocument15 pagesMathematics For Grade 3 Teachersnecro threadNo ratings yet
- Trigonometry: Problem SolvingDocument3 pagesTrigonometry: Problem SolvingananananymousNo ratings yet
- Mechanics of Materia1 Combined Bending and TorsionDocument4 pagesMechanics of Materia1 Combined Bending and Torsionhammad ghaffarNo ratings yet
- Grade 8 - GeometryDocument20 pagesGrade 8 - Geometrycherry.20.2004No ratings yet
- Differential Geometry of Curves and Surfaces 1. Curves in The PlaneDocument20 pagesDifferential Geometry of Curves and Surfaces 1. Curves in The PlaneRobert KemperNo ratings yet
- North Sydney Boys 2021 3U Trials & SolutionsDocument25 pagesNorth Sydney Boys 2021 3U Trials & Solutionsanew.name5245nNo ratings yet
- Assignment 1a (Monsoon 2019) - 2Document9 pagesAssignment 1a (Monsoon 2019) - 2pochireddy revathiNo ratings yet
- Surpac Drill and Blast TutorialDocument69 pagesSurpac Drill and Blast Tutorialgunawan100% (4)
- Ell Siop Live LessonDocument2 pagesEll Siop Live Lessonapi-235815323No ratings yet
- Year 8 Maths Unit 13 Angles in Parallel Lines and PolygonsDocument1 pageYear 8 Maths Unit 13 Angles in Parallel Lines and Polygonsmukona199No ratings yet
- Algebra NASADocument386 pagesAlgebra NASARiadle100% (1)
- Physics 02-Forces and Uniform Circular Motion (2018)Document106 pagesPhysics 02-Forces and Uniform Circular Motion (2018)cedNo ratings yet
- Motion in Two Dimensions: Onceptual UestionsDocument40 pagesMotion in Two Dimensions: Onceptual UestionsranahajNo ratings yet
- Projectile On An Inclined PlaneDocument75 pagesProjectile On An Inclined PlaneBholu WhoopNo ratings yet
- Document PDFDocument5 pagesDocument PDFDerry ArdiansyahNo ratings yet