Download as pdf or txt
You might also like
- ProMAX-SeisSpace Tutorial 2011 Vol1Document384 pagesProMAX-SeisSpace Tutorial 2011 Vol1lethu50% (2)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Rsearch Methods Exam QuestionsDocument82 pagesRsearch Methods Exam Questionsjohn baptesNo ratings yet
- 03MTR - Select and ApplicDocument51 pages03MTR - Select and ApplicHesham MokhtarNo ratings yet
- Gree Mini VRF Brochure 2020Document8 pagesGree Mini VRF Brochure 2020Hewa AkreyNo ratings yet
- 3 Phase Asynchronous Motor - Wide Range of Rotational SpeedDocument5 pages3 Phase Asynchronous Motor - Wide Range of Rotational SpeedMiki SinghNo ratings yet
- Commercial Air ConditioningDocument46 pagesCommercial Air ConditioningMohammad SaleemNo ratings yet
- VFD Fundamentals Copyright 2003 Kilowatt Classroom LLCDocument5 pagesVFD Fundamentals Copyright 2003 Kilowatt Classroom LLCHEMANT RAMJINo ratings yet
- VFD Fundamentals: Constant Torque Constant HPDocument5 pagesVFD Fundamentals: Constant Torque Constant HPHossam KhalilNo ratings yet
- DriveMotorBasics01 PDFDocument11 pagesDriveMotorBasics01 PDFSundar Kumar Vasantha GovindarajuluNo ratings yet
- Application Note - The Effects of Adjusting V/HZ Patterns On Torque Production For Variable Torque ApplicationsDocument8 pagesApplication Note - The Effects of Adjusting V/HZ Patterns On Torque Production For Variable Torque ApplicationsQuality Team qc2.chennaiNo ratings yet
- A CD Rive CharacteristicsDocument6 pagesA CD Rive CharacteristicsbedreddiNo ratings yet
- Lms - Question Bank Unit 3Document6 pagesLms - Question Bank Unit 3JAYAPRAKASH SNo ratings yet
- HP Torque VFDDocument3 pagesHP Torque VFDcaibillyNo ratings yet
- Soft Starter Vs VFDDocument15 pagesSoft Starter Vs VFDMitesh GandhiNo ratings yet
- Lecture No 3Document33 pagesLecture No 3Walid salamaNo ratings yet
- Motor Selection For VSD AppDocument1 pageMotor Selection For VSD AppRANAIVOARIMANANANo ratings yet
- Tension Control and Winder Application GuideDocument7 pagesTension Control and Winder Application GuideSachuuNo ratings yet
- Camille Ri 99Document5 pagesCamille Ri 99tip31No ratings yet
- DESMI VFD 2020 - Constant Speed vs. Variable SpeedDocument18 pagesDESMI VFD 2020 - Constant Speed vs. Variable SpeedAhmed GhonimNo ratings yet
- Calculo de Kva y HZ RedaDocument2 pagesCalculo de Kva y HZ RedaAnonymous kEC3kiyNo ratings yet
- Application Note CTAN #299: Simple Commander SK Torque WinderDocument9 pagesApplication Note CTAN #299: Simple Commander SK Torque Winderpictures19821982No ratings yet
- VFD TutorialDocument21 pagesVFD TutorialDaniel Taiti Kimathi100% (3)
- Torque, HP, and Speed The Speed On A Conveyor Is Increased by Increasing The AC DriveDocument2 pagesTorque, HP, and Speed The Speed On A Conveyor Is Increased by Increasing The AC Drivesanshinde10No ratings yet
- Motores AsincronicosDocument14 pagesMotores AsincronicosBrayan veraNo ratings yet
- 2.09 Emission Related Installation InstructionsDocument8 pages2.09 Emission Related Installation InstructionsBen ThreadwellNo ratings yet
- Problems On AC Drives PDFDocument2 pagesProblems On AC Drives PDFAbbas NizamNo ratings yet
- Hydraulic Turbines 1.1 GeneralDocument11 pagesHydraulic Turbines 1.1 GeneralahmedNo ratings yet
- AC Drives Reliance ElectricDocument12 pagesAC Drives Reliance ElectricnmvikramNo ratings yet
- Reluctance MotorDocument6 pagesReluctance MotorAmirNo ratings yet
- FRN G11S P11SDocument31 pagesFRN G11S P11Stailieuhp100% (1)
- M4.2-1140-001Document4 pagesM4.2-1140-001mpiculNo ratings yet
- New Lennox VRF Sales CatalogDocument92 pagesNew Lennox VRF Sales CatalogHENRY80% (5)
- Precious Plastic - Info On MotorsDocument15 pagesPrecious Plastic - Info On MotorsWillemVandeputNo ratings yet
- NTN-SNR - General List - Technical Characteristics EsDocument17 pagesNTN-SNR - General List - Technical Characteristics EsDaniel EspitiaNo ratings yet
- Hitachi wj200n 1.5kwDocument5 pagesHitachi wj200n 1.5kwdiana zulfahNo ratings yet
- Manual SolconDocument20 pagesManual Solconjorge nuñezNo ratings yet
- Variable Freequency Drive (VFD) : (A Theory and Practical Guide)Document43 pagesVariable Freequency Drive (VFD) : (A Theory and Practical Guide)sanskriti123No ratings yet
- Loads Adjustable Speed Drives: Starting Inertia ONDocument6 pagesLoads Adjustable Speed Drives: Starting Inertia ON1977julNo ratings yet
- VVVF - Working Principle & Its OperationDocument18 pagesVVVF - Working Principle & Its Operationdownload4sumit100% (1)
- Drive Hardware & TerminologyDocument54 pagesDrive Hardware & Terminologyavijeet negelNo ratings yet
- Speed Control of Induction MotorDocument7 pagesSpeed Control of Induction Motorzx1_12No ratings yet
- CT1000-CT1100S (50 HZ)Document3 pagesCT1000-CT1100S (50 HZ)tarekNo ratings yet
- Lecture 28Document15 pagesLecture 28patrickbateman0148No ratings yet
- Drives BasicDocument32 pagesDrives BasicCubix AutomationNo ratings yet
- 50 HZ Vs 60hzDocument4 pages50 HZ Vs 60hzerson1981No ratings yet
- Module 4 CDocument25 pagesModule 4 CBu DakNo ratings yet
- Angular Accuracy Back EMFDocument8 pagesAngular Accuracy Back EMFSoudamini HansdahNo ratings yet
- PE 13 EnhDocument45 pagesPE 13 EnhSanthosh Kumar JNo ratings yet
- Understanding Transient ResponseDocument1 pageUnderstanding Transient ResponseDrey YanNo ratings yet
- (Laxminath, M.) Indian PolityDocument12 pages(Laxminath, M.) Indian PolityvenkatNo ratings yet
- Auto Transfer Starting: ObjectivesDocument2 pagesAuto Transfer Starting: ObjectivesyashNo ratings yet
- Motor&Drive BasicsDocument35 pagesMotor&Drive BasicsSenthil KumarNo ratings yet
- Load Inertia Motor SelectionDocument3 pagesLoad Inertia Motor Selectiondanferreiro8318100% (1)
- Frequency-Power Characteristics of Synchronous GeneratorDocument29 pagesFrequency-Power Characteristics of Synchronous GeneratorFazalur Rehman Babar75% (4)
- Harmonic Analysis of The Cam ShaftDocument3 pagesHarmonic Analysis of The Cam ShaftramsastryNo ratings yet
- PP86S20 400m3.hr at 88.2m TDH Performance DatasheetDocument1 pagePP86S20 400m3.hr at 88.2m TDH Performance DatasheetDH_TeknikNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Mining+Minerals Solutions BrochureDocument4 pagesMining+Minerals Solutions BrochureramoebpNo ratings yet
- TE3 Quick Start GuideDocument44 pagesTE3 Quick Start GuideramoebpNo ratings yet
- TE3 Series Quick Start LeafletDocument2 pagesTE3 Series Quick Start LeafletramoebpNo ratings yet
- TE3 Instruction ManualDocument154 pagesTE3 Instruction ManualramoebpNo ratings yet
- VFNC3 2004PDocument6 pagesVFNC3 2004PramoebpNo ratings yet
- Verilog Creating Analog Behavioral ModelsDocument24 pagesVerilog Creating Analog Behavioral ModelsMarco PriviteraNo ratings yet
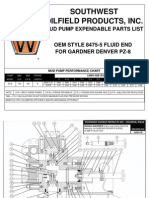
- Oem Gardner Denver Pz-8Document8 pagesOem Gardner Denver Pz-8caballero_tigreNo ratings yet
- CPCS202 08 Arrays 2d S19Document51 pagesCPCS202 08 Arrays 2d S19Al SuNo ratings yet
- Omron ManualDocument44 pagesOmron ManualHaroDavidNo ratings yet
- Improper Rotation: 1 Three DimensionsDocument3 pagesImproper Rotation: 1 Three DimensionsManuel MensaNo ratings yet
- For All Sanfoundry MCQ (1000+ MCQ) JOIN Telegram GroupDocument472 pagesFor All Sanfoundry MCQ (1000+ MCQ) JOIN Telegram GroupRitesh DeshmukhNo ratings yet
- Hitachi FathersdayDocument8 pagesHitachi FathersdayRiverland Welding and Tool SuppliesNo ratings yet
- KU 13 AntennaDocument30 pagesKU 13 Antennawexeta3713No ratings yet
- F646 CompleteSampleDocument36 pagesF646 CompleteSampleraj4523No ratings yet
- DM7490A Decade and Binary Counter: General Description FeaturesDocument6 pagesDM7490A Decade and Binary Counter: General Description FeaturessalNo ratings yet
- A.sateesh 17-202Document17 pagesA.sateesh 17-202Naresh GadidasulaNo ratings yet
- 04 Alternate Process ControlDocument24 pages04 Alternate Process ControlRaja DuraiNo ratings yet
- PH of Buffers Hydrolysed SaltsDocument27 pagesPH of Buffers Hydrolysed SaltsFmipa Khaeru NisaaNo ratings yet
- MAF101 Formula Sheet-2010TR1Document2 pagesMAF101 Formula Sheet-2010TR1Ann VuNo ratings yet
- Certificate in FireDocument11 pagesCertificate in FirevikkykambleNo ratings yet
- The UniverseDocument5 pagesThe UniverseAn MaNo ratings yet
- Topic 9 Broiler Industry (Hatchery Management)Document56 pagesTopic 9 Broiler Industry (Hatchery Management)Musonda MwapeNo ratings yet
- Finite Difference Methods For HJB PDEsDocument12 pagesFinite Difference Methods For HJB PDEsbobmezzNo ratings yet
- EN40: Dynamics and Vibrations: Solutions To Differential Equations of Motion For Vibrating SystemsDocument8 pagesEN40: Dynamics and Vibrations: Solutions To Differential Equations of Motion For Vibrating SystemsDennis KorirNo ratings yet
- ECE Syllabus Anna University (CEG, MIT)Document86 pagesECE Syllabus Anna University (CEG, MIT)Pon Krithikha100% (1)
- Palm Pixi Plus - How To Install Homebrew Apps - WebOS NationDocument28 pagesPalm Pixi Plus - How To Install Homebrew Apps - WebOS NationCA_KenNo ratings yet
- ANSYS Meshing Tutorial Guide 2024 R1Document64 pagesANSYS Meshing Tutorial Guide 2024 R1Vinicius Soares NascimentoNo ratings yet
- Unit-4 Blood Pressure Measurement: M F Pimentel August 26, 2019 Blood Pressure - Biomedical Signal ProcessingDocument59 pagesUnit-4 Blood Pressure Measurement: M F Pimentel August 26, 2019 Blood Pressure - Biomedical Signal Processingpriya dharshiniNo ratings yet
- 9 - Introduction To Network LayerDocument28 pages9 - Introduction To Network LayerDjangoNo ratings yet
- Chloride Corrosion Threshold of Reinforcing Steel in Alkaline Solutions-Open-Circuit Immersion TestsDocument10 pagesChloride Corrosion Threshold of Reinforcing Steel in Alkaline Solutions-Open-Circuit Immersion TestsshameekaNo ratings yet
- Quidway s5600 OrderDocument2 pagesQuidway s5600 OrderRizqon Al-FatiriyNo ratings yet
- Chapter 2Document40 pagesChapter 2Negash adane100% (1)