Download as pdf or txt
You might also like
- Ebook PDF Business Analytics 4th Edition by Jeffrey D Camm PDFDocument41 pagesEbook PDF Business Analytics 4th Edition by Jeffrey D Camm PDFshirley.gallo35794% (54)
- Solution Manual For Elementary Particle Physics An Intuitive Introduction 1st Edition Andrew J LarkoskiDocument38 pagesSolution Manual For Elementary Particle Physics An Intuitive Introduction 1st Edition Andrew J Larkoskiwoolfellinde4jive1100% (26)
- 02 Math2121 Fall2022Document9 pages02 Math2121 Fall2022Zawadul HoqueNo ratings yet
- Finite Element Method For Structural Dynamic and Stability AnalysesDocument40 pagesFinite Element Method For Structural Dynamic and Stability AnalysesabimalainNo ratings yet
- Bondgraph To Transfer FunctionsDocument19 pagesBondgraph To Transfer FunctionskkkprotNo ratings yet
- Chapter 3 - Interpolation Curve Fitting With TutorialsDocument25 pagesChapter 3 - Interpolation Curve Fitting With TutorialsZac StylesNo ratings yet
- Transfer Functions: Student Report Mahmoud Mohamed KhodeirDocument9 pagesTransfer Functions: Student Report Mahmoud Mohamed Khodeirالبياتي محمدNo ratings yet
- A Note On The Relationship of Primal and Dual Simplex: SFU-CMPT TR 1998-21Document14 pagesA Note On The Relationship of Primal and Dual Simplex: SFU-CMPT TR 1998-21amitangrauNo ratings yet
- Finite Automata and Arithmetic: J.-P. AlloucheDocument23 pagesFinite Automata and Arithmetic: J.-P. AlloucheIsyania FarahaniNo ratings yet
- Slides - 1 2 Presentation PDFDocument97 pagesSlides - 1 2 Presentation PDFJc Miranda GuzmanNo ratings yet
- 7 G/M/1 Type ModelsDocument9 pages7 G/M/1 Type ModelsКлара АндрееваNo ratings yet
- Anfis VignetteDocument21 pagesAnfis VignetteWang ZheNo ratings yet
- Gaussian Elimination: How To Solve Systems of Linear EquationsDocument4 pagesGaussian Elimination: How To Solve Systems of Linear Equationskak sydNo ratings yet
- 1 The Lorentz TransformationDocument9 pages1 The Lorentz TransformationRayShefhNo ratings yet
- Inverse Kinematics-3Document51 pagesInverse Kinematics-3Nahom AlemnewNo ratings yet
- CH 4 SplinesDocument44 pagesCH 4 SplinesEdwin Okoampa BoaduNo ratings yet
- Slides - 1 2 PresentationDocument97 pagesSlides - 1 2 PresentationJc Miranda GuzmanNo ratings yet
- EC381 Lecture6 PDFDocument24 pagesEC381 Lecture6 PDFCorazon corazonNo ratings yet
- Inverse KinematicsDocument64 pagesInverse KinematicsHoney RathoreNo ratings yet
- Mathcad - Inside Mathcad - Programming - The For Loop PDFDocument13 pagesMathcad - Inside Mathcad - Programming - The For Loop PDFJéssica GonçalvesNo ratings yet
- Tut 5Document4 pagesTut 5Aakriti VermaNo ratings yet
- Adjacency PDFDocument5 pagesAdjacency PDFFernando Nicolas Ureta GodoyNo ratings yet
- 5 Examples of M/M/1 Type Models: 5.1 The M/M/1 SystemDocument16 pages5 Examples of M/M/1 Type Models: 5.1 The M/M/1 SystemКлара АндрееваNo ratings yet
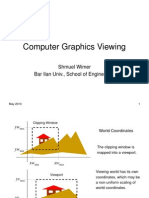
- Computer Graphics Viewing: Shmuel Wimer Bar Ilan Univ., School of EngineeringDocument86 pagesComputer Graphics Viewing: Shmuel Wimer Bar Ilan Univ., School of EngineeringSabareesan SubramanianNo ratings yet
- Simplex MethodDocument8 pagesSimplex MethodalcofieNo ratings yet
- The Calculation of Transmission Networks With The Aid of Graph TheoryDocument14 pagesThe Calculation of Transmission Networks With The Aid of Graph TheoryYANDRAPU MANOJ NAIDU 20MDT1017No ratings yet
- BVAR Models "' A La Sims" in Dynare: 1 Model SettingDocument11 pagesBVAR Models "' A La Sims" in Dynare: 1 Model SettingSEBASTIAN DAVID GARCIA ECHEVERRYNo ratings yet
- m140 Chapter3 Sec3.4 F18completedDocument6 pagesm140 Chapter3 Sec3.4 F18completedHasmitthaNo ratings yet
- MATH1179 Graph Theory Book SolutionDocument4 pagesMATH1179 Graph Theory Book SolutionOviyanNo ratings yet
- Linear Algebra Jordan Canonical Form-2Document26 pagesLinear Algebra Jordan Canonical Form-2Manoj BaishyaNo ratings yet
- Solving Schrödinger Equation With Scattering Matrices. Bound States of Lennard-Jones PotentialDocument16 pagesSolving Schrödinger Equation With Scattering Matrices. Bound States of Lennard-Jones PotentialEduardo SoaresNo ratings yet
- Spline Interpolation Method: Major: All Engineering Majors Authors: Autar Kaw, Jai PaulDocument42 pagesSpline Interpolation Method: Major: All Engineering Majors Authors: Autar Kaw, Jai PaulMuqaddas SarwarNo ratings yet
- SeparableDocument9 pagesSeparableshwetaNo ratings yet
- JordanDocument6 pagesJordanGopal ShresthaNo ratings yet
- LAG5en PDFDocument4 pagesLAG5en PDFMert OzcanNo ratings yet
- Project 06Document14 pagesProject 06parix39346No ratings yet
- Applsci 09 03210 v2Document9 pagesApplsci 09 03210 v2firmansNo ratings yet
- Module - 3 Lecture Notes - 5 Revised Simplex Method, Duality and Sensitivity AnalysisDocument11 pagesModule - 3 Lecture Notes - 5 Revised Simplex Method, Duality and Sensitivity Analysismedardo77No ratings yet
- Course Material (Students)Document46 pagesCourse Material (Students)Lamjed AouaniNo ratings yet
- LineIntegrals PDFDocument11 pagesLineIntegrals PDFJia ToorNo ratings yet
- ME108 Assignment2 20 21Document8 pagesME108 Assignment2 20 21jamiegardnerkerrNo ratings yet
- Thesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmDocument7 pagesThesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmVienNgocQuangNo ratings yet
- Msc19key PDFDocument3 pagesMsc19key PDFManjay PalNo ratings yet
- HW04Document4 pagesHW04aylar9khorsand8No ratings yet
- Complement Os 008Document17 pagesComplement Os 008juanxmanuelNo ratings yet
- Slide-3 Convex ProblemsDocument65 pagesSlide-3 Convex ProblemsLin DNo ratings yet
- Ee/Econ 458 Introduction To Linear Programming: J. MccalleyDocument25 pagesEe/Econ 458 Introduction To Linear Programming: J. Mccalleykaren dejoNo ratings yet
- Topic 14: Maximum Likelihood Estimation: 1 ExamplesDocument6 pagesTopic 14: Maximum Likelihood Estimation: 1 ExamplesRaghavendra M BhatNo ratings yet
- Elec9731 LM3Document21 pagesElec9731 LM3wyx840927627No ratings yet
- Robotics LabDocument10 pagesRobotics LabAbdul Moiz QarniNo ratings yet
- 1 What Is Log-Linearization? Some Basic Results 2 2 Application: The Baseline RBC Model 4Document6 pages1 What Is Log-Linearization? Some Basic Results 2 2 Application: The Baseline RBC Model 4Dynamix SolverNo ratings yet
- 6 M/M/1 Type Models: 6.1 ModelDocument9 pages6 M/M/1 Type Models: 6.1 ModelКлара АндрееваNo ratings yet
- Forward Kinematics: February 4, 2016Document6 pagesForward Kinematics: February 4, 2016Kartik aminNo ratings yet
- 1.5 Elementary Matrices and A Method For Finding The InverseDocument10 pages1.5 Elementary Matrices and A Method For Finding The InverseAndy OrtizNo ratings yet
- InterpolationDocument11 pagesInterpolationdaniyadevaccNo ratings yet
- Nodal Discontinuous Galerkin Methods-MisprintsDocument8 pagesNodal Discontinuous Galerkin Methods-MisprintsAlex BaykinNo ratings yet
- On The Classification of Sub-Riemannian StructuresDocument10 pagesOn The Classification of Sub-Riemannian StructuresatuanaNo ratings yet
- 8-Last Lecture UpdatedDocument34 pages8-Last Lecture UpdatedMohammed MelhemNo ratings yet
- CICSDocument171 pagesCICSRevathy100% (1)
- 16-01-2023 - Feature wall-MODEL ROAD PDFDocument1 page16-01-2023 - Feature wall-MODEL ROAD PDFSanchita OrionNo ratings yet
- Logix 5000 Advanced Process Control and Drives Instructions: Reference ManualDocument1,105 pagesLogix 5000 Advanced Process Control and Drives Instructions: Reference Manualfrancois lecreuxNo ratings yet
- Log 1 1 201960010Document2 pagesLog 1 1 201960010yisselNo ratings yet
- Nitin - Pant Magento - Lead Resume Sep 2022Document2 pagesNitin - Pant Magento - Lead Resume Sep 2022Manisha AswarNo ratings yet
- Automatic Concrete Formwork Quantity Takeoff Using Building Information ModelingDocument9 pagesAutomatic Concrete Formwork Quantity Takeoff Using Building Information ModelingSrinivasa RajuNo ratings yet
- Social Media: Asif Mehmood 007 M Bilal 012 Hafiz Uzair Ijaz 006Document16 pagesSocial Media: Asif Mehmood 007 M Bilal 012 Hafiz Uzair Ijaz 006Asif MehmoodNo ratings yet
- Quarterly Based Multiple Project Timeline WDDocument2 pagesQuarterly Based Multiple Project Timeline WDRudy FlachNo ratings yet
- CPQ IntegrationsDocument315 pagesCPQ IntegrationsAhmad BadawyNo ratings yet
- Capstone Chapter 1 3Document38 pagesCapstone Chapter 1 3Ian FabillonNo ratings yet
- Turbomachinery Monitoring and DiagnosticsDocument33 pagesTurbomachinery Monitoring and Diagnosticsيوسف عبدالرحمن رمضانNo ratings yet
- How Trustless Is Bitcoin ReallyDocument7 pagesHow Trustless Is Bitcoin Reallyamir.workNo ratings yet
- Structural Engineering Thesis SampleDocument8 pagesStructural Engineering Thesis Sampledwk3zwbx100% (2)
- Full Metal CriaDocument2 pagesFull Metal CriaJoão SantosNo ratings yet
- Solid PrinciplesDocument3 pagesSolid PrinciplesAravinda S HollaNo ratings yet
- Sba - Google FormsDocument21 pagesSba - Google FormsOmprakashNo ratings yet
- Power BI TrainingDocument10 pagesPower BI Trainingshashank vishwakarmaNo ratings yet
- Frontend Server:: Authorizations - Sap Netweaver User Interface Services - Sap LibraryDocument14 pagesFrontend Server:: Authorizations - Sap Netweaver User Interface Services - Sap Librarypal666No ratings yet
- XDSF-Assignment # 1Document3 pagesXDSF-Assignment # 1scribd01No ratings yet
- Process Analysis 202021 R1Document39 pagesProcess Analysis 202021 R1kamals55No ratings yet
- Iisserver PDFDocument23 pagesIisserver PDFmojtaba jaliliNo ratings yet
- Donna Jno. Baptiste-Athanaze Assignment 3Document19 pagesDonna Jno. Baptiste-Athanaze Assignment 3Donna AthanazeNo ratings yet
- 6473 Quiz Software Management SystemDocument22 pages6473 Quiz Software Management SystemRohan ChouhanNo ratings yet
- LS 1Document10 pagesLS 1Ms. Divya KonikkaraNo ratings yet
- G5657 GlobalMixed ModetechnologyDocument1 pageG5657 GlobalMixed Modetechnologygava hoNo ratings yet
- Front Internship Report SushanthDocument5 pagesFront Internship Report SushanthHarish PandiNo ratings yet
- Vo IPDocument37 pagesVo IPD10 newsNo ratings yet
- Mai Segawa - G7-Dj-B-Unit1-ScratchDocument5 pagesMai Segawa - G7-Dj-B-Unit1-Scratchapi-569060511No ratings yet