
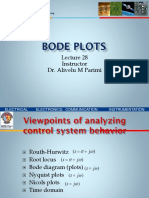
Bode Plot
Bode Plot
You might also like
- Bode Diagrams of Transfer Functions and Impedances: ECEN 2260 Supplementary Notes R. W. EricksonDocument49 pagesBode Diagrams of Transfer Functions and Impedances: ECEN 2260 Supplementary Notes R. W. Ericksondivya k sNo ratings yet
- Control Systems: GATE Objective & Numerical Type SolutionsDocument9 pagesControl Systems: GATE Objective & Numerical Type SolutionsAakash DewanganNo ratings yet
- E A J H T J H B e J H A: Stics. Characteri Phase and Magnitude Called Generally Are of Function As of Plots),, (Document40 pagesE A J H T J H B e J H A: Stics. Characteri Phase and Magnitude Called Generally Are of Function As of Plots),, (MaryamRazzaqNo ratings yet
- Module 4 - Bode PlotsDocument63 pagesModule 4 - Bode PlotsPoovaiahkkNishanNo ratings yet
- Chapter12 BodeDocument40 pagesChapter12 BodeHassaan SiddiquiNo ratings yet
- WK 12 FR Bode Plot Nyquist May 11,2015Document104 pagesWK 12 FR Bode Plot Nyquist May 11,2015biruk1No ratings yet
- Bode Plot PDFDocument41 pagesBode Plot PDFdolaNo ratings yet
- NMB34203 - ch6 - Frequency Response (Bode Plot)Document45 pagesNMB34203 - ch6 - Frequency Response (Bode Plot)fatinNo ratings yet
- Bode Plot of Basic TermsDocument33 pagesBode Plot of Basic TermsVunnava SravaniNo ratings yet
- Frequency Response Example:: S S S K KGHDocument11 pagesFrequency Response Example:: S S S K KGHVu NghiaNo ratings yet
- Control System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorDocument76 pagesControl System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorSudhanshu Singh0% (1)
- Online Control Lecture - 8.pdfDocument13 pagesOnline Control Lecture - 8.pdfAmylia NatashaNo ratings yet
- Esc201: Introduction To Electronics: Frequency Domain Response Contd.Document29 pagesEsc201: Introduction To Electronics: Frequency Domain Response Contd.ShreyaNo ratings yet
- Frequency ResponseDocument50 pagesFrequency ResponseAli AhmadNo ratings yet
- Lecture 28 Bode Plots PDFDocument32 pagesLecture 28 Bode Plots PDFVEMIREDDY CHANDRA TEJNo ratings yet
- CH - 8 (Bode Plot) PD SolDocument28 pagesCH - 8 (Bode Plot) PD SolAnant SinhaNo ratings yet
- Bode Plot Tutorial: 2.1 MagnitudeDocument5 pagesBode Plot Tutorial: 2.1 MagnitudeKinza FaisalNo ratings yet
- Esc201: Introducton To Electronics: Dept. of Electrical Engineering Iit KanpurDocument24 pagesEsc201: Introducton To Electronics: Dept. of Electrical Engineering Iit Kanpurash jayNo ratings yet
- 3 Isep SLBDocument14 pages3 Isep SLBBalaji SohanNo ratings yet
- Irwin 12.2Document12 pagesIrwin 12.2MAURICIO ANDRES RODRIGUEZ MARTINEZNo ratings yet
- Project Report: EE615: Mixed Signal IC DesignDocument20 pagesProject Report: EE615: Mixed Signal IC DesignRahul MhatreNo ratings yet
- Control System Design by Using Frequency Response ApproachDocument73 pagesControl System Design by Using Frequency Response ApproachDipti GuptaNo ratings yet
- BDA3073 - 11 Bode PlotDocument26 pagesBDA3073 - 11 Bode PlotAhmad FaidhiNo ratings yet
- Frequency ResponseDocument28 pagesFrequency ResponseJalu PrasetyoNo ratings yet
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 2 EE419 Lec2,3 Bode PlotDocument42 pages351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 2 EE419 Lec2,3 Bode Plotyoussef hossamNo ratings yet
- 9, Frequency Response 2 Bode Plot PDFDocument29 pages9, Frequency Response 2 Bode Plot PDFwasif karimNo ratings yet
- Ilovepdf MergedDocument2 pagesIlovepdf Mergedlololo2354No ratings yet
- Ilovepdf MergedDocument2 pagesIlovepdf Mergedlololo2354No ratings yet
- Bode Diagram: Frequency (Rad/s)Document2 pagesBode Diagram: Frequency (Rad/s)lololo2354No ratings yet
- Bode Plot - EC 502Document37 pagesBode Plot - EC 502ajay meena100% (2)
- EM Dis CH 10 Part 2Document38 pagesEM Dis CH 10 Part 2اياس البرنيةNo ratings yet
- Bode Handout PDFDocument29 pagesBode Handout PDFSuhas ShirolNo ratings yet
- Module 5: Design of Sampled Data Control SystemsDocument5 pagesModule 5: Design of Sampled Data Control SystemsOmarShindiNo ratings yet
- Bode Lesson1Document32 pagesBode Lesson1Fairus AffiniNo ratings yet
- Response and Stability Analysis in Frequency DomainDocument54 pagesResponse and Stability Analysis in Frequency DomainMYNAMENo ratings yet
- DS ANT TNA352A33rDocument3 pagesDS ANT TNA352A33rEdelNo ratings yet
- Filtros: ELC-315 2012 Universidad de El SalvadorDocument38 pagesFiltros: ELC-315 2012 Universidad de El SalvadorCC RamosNo ratings yet
- Topic#9 Frequency Domain Analysis (Bode Plots)Document43 pagesTopic#9 Frequency Domain Analysis (Bode Plots)Ahmed ShafeekNo ratings yet
- Cascode Amplifiers and Cascode Current MirrorsDocument17 pagesCascode Amplifiers and Cascode Current MirrorsJohn ErhinyoNo ratings yet
- 10 1 1 112 2812Document49 pages10 1 1 112 2812Abdulazeez Ayomide AdebimpeNo ratings yet
- Decibel Units (DB) : AppendixDocument4 pagesDecibel Units (DB) : AppendixAmit Kumar100% (1)
- Wind Loading (ASCE7-05)Document2 pagesWind Loading (ASCE7-05)Antonysamy SanthanamNo ratings yet
- RC-BEAMDocument1 pageRC-BEAMAngusNo ratings yet
- 2L4H + 2.6G TDD / 2.0 M: 2G2U2S4RHD-21Document3 pages2L4H + 2.6G TDD / 2.0 M: 2G2U2S4RHD-21glukkerNo ratings yet
- Bode SketchingDocument1 pageBode Sketchingpassio_donNo ratings yet
- ELEN90055 Control Systems: Worksheet 5 - Solutions To Starred ProblemsDocument5 pagesELEN90055 Control Systems: Worksheet 5 - Solutions To Starred ProblemsMingyue WangNo ratings yet
- Activefilters 141231042113 Conversion Gate02 PDFDocument46 pagesActivefilters 141231042113 Conversion Gate02 PDFAbbas HussainNo ratings yet
- Powerwave PDFDocument1 pagePowerwave PDFRoy TanjungNo ratings yet
- Bode PlotDocument30 pagesBode PlotSatya SuryaNo ratings yet
- Cable ID: 357P124 Test Summary: PASS: Headroom: 8.3 DB (NEXT 12-78) Test Limit: TIA Cat 5e ChannelDocument1 pageCable ID: 357P124 Test Summary: PASS: Headroom: 8.3 DB (NEXT 12-78) Test Limit: TIA Cat 5e ChanneletecnetNo ratings yet
- Bode PlotDocument5 pagesBode PlotMr. nobodyNo ratings yet
- ANT-A06240PD00v06-3770 DatasheetDocument3 pagesANT-A06240PD00v06-3770 DatasheetЮра ЧижковNo ratings yet
- Bode PlotDocument6 pagesBode PlotChandan S KNo ratings yet
- MTS924# 2g2u2s4tdp-21Document4 pagesMTS924# 2g2u2s4tdp-21glukkerNo ratings yet
- Antenna 3402 1L 2M 1.4m: Capacity Compact CoverageDocument6 pagesAntenna 3402 1L 2M 1.4m: Capacity Compact CoverageRogério MoraesNo ratings yet
- Bode Plot BasicsDocument12 pagesBode Plot BasicsAnaniah DuraiNo ratings yet
- Triple Digit 7 Segment Display GNT-4031Ax-BxDocument1 pageTriple Digit 7 Segment Display GNT-4031Ax-BxFlavio Tonello TavaresNo ratings yet
- Bode Plots Lecture Notes Study MaterialDocument9 pagesBode Plots Lecture Notes Study MaterialShivam GaunsNo ratings yet
- Huwavei-Antenaa-32Document6 pagesHuwavei-Antenaa-32MOHSENNo ratings yet
- Discrete Wavelet Transform: A Signal Processing ApproachFrom EverandDiscrete Wavelet Transform: A Signal Processing ApproachRating: 5 out of 5 stars5/5 (2)
- s11665-023-08783-8Document12 pagess11665-023-08783-8hcmadhuNo ratings yet
- 1SI19ME025Document1 page1SI19ME025hcmadhuNo ratings yet
- Registration Report-22-08-2023-13 - 56 - 36Document1 pageRegistration Report-22-08-2023-13 - 56 - 36hcmadhuNo ratings yet
- Madhu, H. C. - Author Details - Scopus PreviewDocument4 pagesMadhu, H. C. - Author Details - Scopus PreviewhcmadhuNo ratings yet
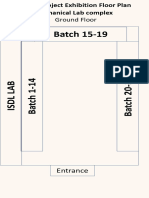
- Exibition Floor Plan - 2023-24Document1 pageExibition Floor Plan - 2023-24hcmadhuNo ratings yet
- Feedback ReportDocument1 pageFeedback ReporthcmadhuNo ratings yet
- Kayak ADocument1 pageKayak AhcmadhuNo ratings yet
- Fatigue Presentation-Mae160 Chap14Document43 pagesFatigue Presentation-Mae160 Chap14hcmadhuNo ratings yet
- The Electronics Hobby KITDocument142 pagesThe Electronics Hobby KITHafiz Zukafle100% (5)
- Model Miss Match Fool ProfDocument1 pageModel Miss Match Fool ProfhcmadhuNo ratings yet
- Activity PalnDocument3 pagesActivity PalnhcmadhuNo ratings yet
- Devops MCQ PDFDocument6 pagesDevops MCQ PDFSaad Mohamed SaadNo ratings yet
- The Roots of Modern Feminism: Mary Wollstonecraft and The French RevolutionDocument16 pagesThe Roots of Modern Feminism: Mary Wollstonecraft and The French RevolutionShirlya LimaNo ratings yet
- What Is Pesonet?: Frequently Asked Questions OnDocument4 pagesWhat Is Pesonet?: Frequently Asked Questions OnJackNo ratings yet
- Cambridge IGCSE: Information and Communication Technology 0417/31Document8 pagesCambridge IGCSE: Information and Communication Technology 0417/31Erdoğan ŞahinNo ratings yet
- LVL 0 - Practical - 2 Contouring Cut and Fill For EarthworksDocument4 pagesLVL 0 - Practical - 2 Contouring Cut and Fill For Earthworksnuraina aqilahNo ratings yet
- Writing Results in A Research PaperDocument6 pagesWriting Results in A Research Paperafedpmqgr100% (1)
- Supplemental-Guide GenderQuestWkbkTeensDocument9 pagesSupplemental-Guide GenderQuestWkbkTeensPaula ZuccoloNo ratings yet
- Parametric & Non Parametric TestDocument8 pagesParametric & Non Parametric TestAngelica Alejandro100% (1)
- Ship Maintenance Planning With NavCadDocument4 pagesShip Maintenance Planning With NavCadtheleepiper8830No ratings yet
- A New Framework For Developping and Evaluating Complex InterventionsDocument11 pagesA New Framework For Developping and Evaluating Complex InterventionsyomellamocumbiaNo ratings yet
- Competency Enhancing Courses Jan June2023Document2 pagesCompetency Enhancing Courses Jan June2023Yashveer TakooryNo ratings yet
- Corrigendum 18.10.2011Document4 pagesCorrigendum 18.10.2011Ravi KalesNo ratings yet
- 624-DEFLECTOR PLATE CHANGING of CSR#3Document4 pages624-DEFLECTOR PLATE CHANGING of CSR#3Buddy HartNo ratings yet
- Form Conversion StepDocument18 pagesForm Conversion StepDSyazaNo ratings yet
- ABCACBADocument3 pagesABCACBAJohn Clement HusainNo ratings yet
- HSE-BMS-013 Color Coding and InspectionDocument30 pagesHSE-BMS-013 Color Coding and InspectionSatya Naidu100% (1)
- Mechanical Engineering Machine Design Important MCQ PDF: All Exam Review AddaDocument24 pagesMechanical Engineering Machine Design Important MCQ PDF: All Exam Review AddaJatan DeepNo ratings yet
- Aditya Vikram Verma - CVDocument2 pagesAditya Vikram Verma - CVAdityaVikramVermaNo ratings yet
- Optimization of Methanol ProductionDocument14 pagesOptimization of Methanol ProductionMuhammad AliNo ratings yet
- Plain Concrete Footing Design Based On ACI 318-14: Input Data Design SummaryDocument4 pagesPlain Concrete Footing Design Based On ACI 318-14: Input Data Design SummaryShadin Asari ArabaniNo ratings yet
- Handout - 20475 - AU 2016 Class Handout - Revit and Dynamo For Landscape ArchitectureDocument58 pagesHandout - 20475 - AU 2016 Class Handout - Revit and Dynamo For Landscape ArchitectureKelvinatorNo ratings yet
- Foreword Edgar Morin Path of Complexity - Alfonso MontuoriDocument32 pagesForeword Edgar Morin Path of Complexity - Alfonso MontuoriFrancisco LionNo ratings yet
- Metaphors and Similes Lesson PlanDocument4 pagesMetaphors and Similes Lesson Planapi-242439128No ratings yet
- cmsc420 Fall2020 LectsDocument156 pagescmsc420 Fall2020 LectsAnthony-Dimitri ANo ratings yet
- Mitsubishi Triton BrochureDocument24 pagesMitsubishi Triton BrochureShahbazAhmadNo ratings yet
- Sensor de TierraDocument3 pagesSensor de TierraAnonymous FXM2q3hM2No ratings yet
- List of NDT EquipmentsDocument1 pageList of NDT EquipmentsAnandNo ratings yet
- 5th Ed Ch02 QCDocument6 pages5th Ed Ch02 QCmohanNo ratings yet
- An Introduction To Augmented Reality Aided ManufacturingDocument29 pagesAn Introduction To Augmented Reality Aided ManufacturingSahilNo ratings yet
- Internal Combustion Engines - R. K. RajputDocument352 pagesInternal Combustion Engines - R. K. RajputmeetbalakumarNo ratings yet


































































































Download as pdf or txt
You might also like
- Bode Diagrams of Transfer Functions and Impedances: ECEN 2260 Supplementary Notes R. W. EricksonDocument49 pagesBode Diagrams of Transfer Functions and Impedances: ECEN 2260 Supplementary Notes R. W. Ericksondivya k sNo ratings yet
- Control Systems: GATE Objective & Numerical Type SolutionsDocument9 pagesControl Systems: GATE Objective & Numerical Type SolutionsAakash DewanganNo ratings yet
- E A J H T J H B e J H A: Stics. Characteri Phase and Magnitude Called Generally Are of Function As of Plots),, (Document40 pagesE A J H T J H B e J H A: Stics. Characteri Phase and Magnitude Called Generally Are of Function As of Plots),, (MaryamRazzaqNo ratings yet
- Module 4 - Bode PlotsDocument63 pagesModule 4 - Bode PlotsPoovaiahkkNishanNo ratings yet
- Chapter12 BodeDocument40 pagesChapter12 BodeHassaan SiddiquiNo ratings yet
- WK 12 FR Bode Plot Nyquist May 11,2015Document104 pagesWK 12 FR Bode Plot Nyquist May 11,2015biruk1No ratings yet
- Bode Plot PDFDocument41 pagesBode Plot PDFdolaNo ratings yet
- NMB34203 - ch6 - Frequency Response (Bode Plot)Document45 pagesNMB34203 - ch6 - Frequency Response (Bode Plot)fatinNo ratings yet
- Bode Plot of Basic TermsDocument33 pagesBode Plot of Basic TermsVunnava SravaniNo ratings yet
- Frequency Response Example:: S S S K KGHDocument11 pagesFrequency Response Example:: S S S K KGHVu NghiaNo ratings yet
- Control System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorDocument76 pagesControl System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorSudhanshu Singh0% (1)
- Online Control Lecture - 8.pdfDocument13 pagesOnline Control Lecture - 8.pdfAmylia NatashaNo ratings yet
- Esc201: Introduction To Electronics: Frequency Domain Response Contd.Document29 pagesEsc201: Introduction To Electronics: Frequency Domain Response Contd.ShreyaNo ratings yet
- Frequency ResponseDocument50 pagesFrequency ResponseAli AhmadNo ratings yet
- Lecture 28 Bode Plots PDFDocument32 pagesLecture 28 Bode Plots PDFVEMIREDDY CHANDRA TEJNo ratings yet
- CH - 8 (Bode Plot) PD SolDocument28 pagesCH - 8 (Bode Plot) PD SolAnant SinhaNo ratings yet
- Bode Plot Tutorial: 2.1 MagnitudeDocument5 pagesBode Plot Tutorial: 2.1 MagnitudeKinza FaisalNo ratings yet
- Esc201: Introducton To Electronics: Dept. of Electrical Engineering Iit KanpurDocument24 pagesEsc201: Introducton To Electronics: Dept. of Electrical Engineering Iit Kanpurash jayNo ratings yet
- 3 Isep SLBDocument14 pages3 Isep SLBBalaji SohanNo ratings yet
- Irwin 12.2Document12 pagesIrwin 12.2MAURICIO ANDRES RODRIGUEZ MARTINEZNo ratings yet
- Project Report: EE615: Mixed Signal IC DesignDocument20 pagesProject Report: EE615: Mixed Signal IC DesignRahul MhatreNo ratings yet
- Control System Design by Using Frequency Response ApproachDocument73 pagesControl System Design by Using Frequency Response ApproachDipti GuptaNo ratings yet
- BDA3073 - 11 Bode PlotDocument26 pagesBDA3073 - 11 Bode PlotAhmad FaidhiNo ratings yet
- Frequency ResponseDocument28 pagesFrequency ResponseJalu PrasetyoNo ratings yet
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 2 EE419 Lec2,3 Bode PlotDocument42 pages351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 2 EE419 Lec2,3 Bode Plotyoussef hossamNo ratings yet
- 9, Frequency Response 2 Bode Plot PDFDocument29 pages9, Frequency Response 2 Bode Plot PDFwasif karimNo ratings yet
- Ilovepdf MergedDocument2 pagesIlovepdf Mergedlololo2354No ratings yet
- Ilovepdf MergedDocument2 pagesIlovepdf Mergedlololo2354No ratings yet
- Bode Diagram: Frequency (Rad/s)Document2 pagesBode Diagram: Frequency (Rad/s)lololo2354No ratings yet
- Bode Plot - EC 502Document37 pagesBode Plot - EC 502ajay meena100% (2)
- EM Dis CH 10 Part 2Document38 pagesEM Dis CH 10 Part 2اياس البرنيةNo ratings yet
- Bode Handout PDFDocument29 pagesBode Handout PDFSuhas ShirolNo ratings yet
- Module 5: Design of Sampled Data Control SystemsDocument5 pagesModule 5: Design of Sampled Data Control SystemsOmarShindiNo ratings yet
- Bode Lesson1Document32 pagesBode Lesson1Fairus AffiniNo ratings yet
- Response and Stability Analysis in Frequency DomainDocument54 pagesResponse and Stability Analysis in Frequency DomainMYNAMENo ratings yet
- DS ANT TNA352A33rDocument3 pagesDS ANT TNA352A33rEdelNo ratings yet
- Filtros: ELC-315 2012 Universidad de El SalvadorDocument38 pagesFiltros: ELC-315 2012 Universidad de El SalvadorCC RamosNo ratings yet
- Topic#9 Frequency Domain Analysis (Bode Plots)Document43 pagesTopic#9 Frequency Domain Analysis (Bode Plots)Ahmed ShafeekNo ratings yet
- Cascode Amplifiers and Cascode Current MirrorsDocument17 pagesCascode Amplifiers and Cascode Current MirrorsJohn ErhinyoNo ratings yet
- 10 1 1 112 2812Document49 pages10 1 1 112 2812Abdulazeez Ayomide AdebimpeNo ratings yet
- Decibel Units (DB) : AppendixDocument4 pagesDecibel Units (DB) : AppendixAmit Kumar100% (1)
- Wind Loading (ASCE7-05)Document2 pagesWind Loading (ASCE7-05)Antonysamy SanthanamNo ratings yet
- RC-BEAMDocument1 pageRC-BEAMAngusNo ratings yet
- 2L4H + 2.6G TDD / 2.0 M: 2G2U2S4RHD-21Document3 pages2L4H + 2.6G TDD / 2.0 M: 2G2U2S4RHD-21glukkerNo ratings yet
- Bode SketchingDocument1 pageBode Sketchingpassio_donNo ratings yet
- ELEN90055 Control Systems: Worksheet 5 - Solutions To Starred ProblemsDocument5 pagesELEN90055 Control Systems: Worksheet 5 - Solutions To Starred ProblemsMingyue WangNo ratings yet
- Activefilters 141231042113 Conversion Gate02 PDFDocument46 pagesActivefilters 141231042113 Conversion Gate02 PDFAbbas HussainNo ratings yet
- Powerwave PDFDocument1 pagePowerwave PDFRoy TanjungNo ratings yet
- Bode PlotDocument30 pagesBode PlotSatya SuryaNo ratings yet
- Cable ID: 357P124 Test Summary: PASS: Headroom: 8.3 DB (NEXT 12-78) Test Limit: TIA Cat 5e ChannelDocument1 pageCable ID: 357P124 Test Summary: PASS: Headroom: 8.3 DB (NEXT 12-78) Test Limit: TIA Cat 5e ChanneletecnetNo ratings yet
- Bode PlotDocument5 pagesBode PlotMr. nobodyNo ratings yet
- ANT-A06240PD00v06-3770 DatasheetDocument3 pagesANT-A06240PD00v06-3770 DatasheetЮра ЧижковNo ratings yet
- Bode PlotDocument6 pagesBode PlotChandan S KNo ratings yet
- MTS924# 2g2u2s4tdp-21Document4 pagesMTS924# 2g2u2s4tdp-21glukkerNo ratings yet
- Antenna 3402 1L 2M 1.4m: Capacity Compact CoverageDocument6 pagesAntenna 3402 1L 2M 1.4m: Capacity Compact CoverageRogério MoraesNo ratings yet
- Bode Plot BasicsDocument12 pagesBode Plot BasicsAnaniah DuraiNo ratings yet
- Triple Digit 7 Segment Display GNT-4031Ax-BxDocument1 pageTriple Digit 7 Segment Display GNT-4031Ax-BxFlavio Tonello TavaresNo ratings yet
- Bode Plots Lecture Notes Study MaterialDocument9 pagesBode Plots Lecture Notes Study MaterialShivam GaunsNo ratings yet
- Huwavei-Antenaa-32Document6 pagesHuwavei-Antenaa-32MOHSENNo ratings yet
- Discrete Wavelet Transform: A Signal Processing ApproachFrom EverandDiscrete Wavelet Transform: A Signal Processing ApproachRating: 5 out of 5 stars5/5 (2)
- s11665-023-08783-8Document12 pagess11665-023-08783-8hcmadhuNo ratings yet
- 1SI19ME025Document1 page1SI19ME025hcmadhuNo ratings yet
- Registration Report-22-08-2023-13 - 56 - 36Document1 pageRegistration Report-22-08-2023-13 - 56 - 36hcmadhuNo ratings yet
- Madhu, H. C. - Author Details - Scopus PreviewDocument4 pagesMadhu, H. C. - Author Details - Scopus PreviewhcmadhuNo ratings yet
- Exibition Floor Plan - 2023-24Document1 pageExibition Floor Plan - 2023-24hcmadhuNo ratings yet
- Feedback ReportDocument1 pageFeedback ReporthcmadhuNo ratings yet
- Kayak ADocument1 pageKayak AhcmadhuNo ratings yet
- Fatigue Presentation-Mae160 Chap14Document43 pagesFatigue Presentation-Mae160 Chap14hcmadhuNo ratings yet
- The Electronics Hobby KITDocument142 pagesThe Electronics Hobby KITHafiz Zukafle100% (5)
- Model Miss Match Fool ProfDocument1 pageModel Miss Match Fool ProfhcmadhuNo ratings yet
- Activity PalnDocument3 pagesActivity PalnhcmadhuNo ratings yet
- Devops MCQ PDFDocument6 pagesDevops MCQ PDFSaad Mohamed SaadNo ratings yet
- The Roots of Modern Feminism: Mary Wollstonecraft and The French RevolutionDocument16 pagesThe Roots of Modern Feminism: Mary Wollstonecraft and The French RevolutionShirlya LimaNo ratings yet
- What Is Pesonet?: Frequently Asked Questions OnDocument4 pagesWhat Is Pesonet?: Frequently Asked Questions OnJackNo ratings yet
- Cambridge IGCSE: Information and Communication Technology 0417/31Document8 pagesCambridge IGCSE: Information and Communication Technology 0417/31Erdoğan ŞahinNo ratings yet
- LVL 0 - Practical - 2 Contouring Cut and Fill For EarthworksDocument4 pagesLVL 0 - Practical - 2 Contouring Cut and Fill For Earthworksnuraina aqilahNo ratings yet
- Writing Results in A Research PaperDocument6 pagesWriting Results in A Research Paperafedpmqgr100% (1)
- Supplemental-Guide GenderQuestWkbkTeensDocument9 pagesSupplemental-Guide GenderQuestWkbkTeensPaula ZuccoloNo ratings yet
- Parametric & Non Parametric TestDocument8 pagesParametric & Non Parametric TestAngelica Alejandro100% (1)
- Ship Maintenance Planning With NavCadDocument4 pagesShip Maintenance Planning With NavCadtheleepiper8830No ratings yet
- A New Framework For Developping and Evaluating Complex InterventionsDocument11 pagesA New Framework For Developping and Evaluating Complex InterventionsyomellamocumbiaNo ratings yet
- Competency Enhancing Courses Jan June2023Document2 pagesCompetency Enhancing Courses Jan June2023Yashveer TakooryNo ratings yet
- Corrigendum 18.10.2011Document4 pagesCorrigendum 18.10.2011Ravi KalesNo ratings yet
- 624-DEFLECTOR PLATE CHANGING of CSR#3Document4 pages624-DEFLECTOR PLATE CHANGING of CSR#3Buddy HartNo ratings yet
- Form Conversion StepDocument18 pagesForm Conversion StepDSyazaNo ratings yet
- ABCACBADocument3 pagesABCACBAJohn Clement HusainNo ratings yet
- HSE-BMS-013 Color Coding and InspectionDocument30 pagesHSE-BMS-013 Color Coding and InspectionSatya Naidu100% (1)
- Mechanical Engineering Machine Design Important MCQ PDF: All Exam Review AddaDocument24 pagesMechanical Engineering Machine Design Important MCQ PDF: All Exam Review AddaJatan DeepNo ratings yet
- Aditya Vikram Verma - CVDocument2 pagesAditya Vikram Verma - CVAdityaVikramVermaNo ratings yet
- Optimization of Methanol ProductionDocument14 pagesOptimization of Methanol ProductionMuhammad AliNo ratings yet
- Plain Concrete Footing Design Based On ACI 318-14: Input Data Design SummaryDocument4 pagesPlain Concrete Footing Design Based On ACI 318-14: Input Data Design SummaryShadin Asari ArabaniNo ratings yet
- Handout - 20475 - AU 2016 Class Handout - Revit and Dynamo For Landscape ArchitectureDocument58 pagesHandout - 20475 - AU 2016 Class Handout - Revit and Dynamo For Landscape ArchitectureKelvinatorNo ratings yet
- Foreword Edgar Morin Path of Complexity - Alfonso MontuoriDocument32 pagesForeword Edgar Morin Path of Complexity - Alfonso MontuoriFrancisco LionNo ratings yet
- Metaphors and Similes Lesson PlanDocument4 pagesMetaphors and Similes Lesson Planapi-242439128No ratings yet
- cmsc420 Fall2020 LectsDocument156 pagescmsc420 Fall2020 LectsAnthony-Dimitri ANo ratings yet
- Mitsubishi Triton BrochureDocument24 pagesMitsubishi Triton BrochureShahbazAhmadNo ratings yet
- Sensor de TierraDocument3 pagesSensor de TierraAnonymous FXM2q3hM2No ratings yet
- List of NDT EquipmentsDocument1 pageList of NDT EquipmentsAnandNo ratings yet
- 5th Ed Ch02 QCDocument6 pages5th Ed Ch02 QCmohanNo ratings yet
- An Introduction To Augmented Reality Aided ManufacturingDocument29 pagesAn Introduction To Augmented Reality Aided ManufacturingSahilNo ratings yet
- Internal Combustion Engines - R. K. RajputDocument352 pagesInternal Combustion Engines - R. K. RajputmeetbalakumarNo ratings yet