Download as pdf or txt
You might also like
- Hart Chapter 6 SolutionsDocument27 pagesHart Chapter 6 SolutionsCassio Scheffer70% (20)
- Automatic Speed Control For Fans and CoolersDocument54 pagesAutomatic Speed Control For Fans and CoolersPrudhvi Raj63% (8)
- RISH Delta Energy-DemandDocument8 pagesRISH Delta Energy-DemandRenato García TejadaNo ratings yet
- Lab 14 - 3-Phase AlternatorDocument7 pagesLab 14 - 3-Phase AlternatorjalilemadiNo ratings yet
- Otho Niversity Faculty of Engineering and Applied SciencesDocument15 pagesOtho Niversity Faculty of Engineering and Applied Scienceskobamelo LetowaNo ratings yet
- Be3251 Beee QBDocument3 pagesBe3251 Beee QBMr MovieNo ratings yet
- Universal MotorsDocument17 pagesUniversal Motorsjoseperalta.13ppNo ratings yet
- Met 1Document5 pagesMet 1Ářvíňď PřášáďNo ratings yet
- Assignment 3Document8 pagesAssignment 3Renz MykoNo ratings yet
- Lab 08 - DC GeneratorsDocument9 pagesLab 08 - DC GeneratorsGaloenkz100% (1)
- Synch Alternator Exp6Document8 pagesSynch Alternator Exp6Prìyañshú GuptãNo ratings yet
- Module 10 - Paralleling of DC GeneratorsDocument24 pagesModule 10 - Paralleling of DC GeneratorsNoel Bacton100% (1)
- Generator Exciter & Voltage ExciterDocument34 pagesGenerator Exciter & Voltage ExciterYasir MehmoodNo ratings yet
- AC Series MotorsDocument8 pagesAC Series Motorsゞ『HaiDerツ98〆No ratings yet
- Define The "Phase Shift"?: Resistance Ohm's LawDocument6 pagesDefine The "Phase Shift"?: Resistance Ohm's LawMuhammad Shahid LatifNo ratings yet
- Presentation On DVR, JS Saroya, CS Singh, 03.12.11Document75 pagesPresentation On DVR, JS Saroya, CS Singh, 03.12.11Amit BiswasNo ratings yet
- How Is Ac Voltage Produced?Document4 pagesHow Is Ac Voltage Produced?Mariappan NaNo ratings yet
- Practical Activity 2 DC Shunt Motor PLMDocument9 pagesPractical Activity 2 DC Shunt Motor PLMMarc Jairro GajudoNo ratings yet
- Synchronous Generator TrainerDocument6 pagesSynchronous Generator TrainerBabyNo ratings yet
- Capacitor MotorDocument4 pagesCapacitor MotorianguiebNo ratings yet
- V-I Characteristics of DC Generators 1 Aim: 2.1 Separately Excited DC GeneratorDocument7 pagesV-I Characteristics of DC Generators 1 Aim: 2.1 Separately Excited DC GeneratorTaufik Al RasyidNo ratings yet
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- ACTIVITY 1: Three Phase Alternator: Open-And Short-Circuit CharacteristicsDocument17 pagesACTIVITY 1: Three Phase Alternator: Open-And Short-Circuit CharacteristicsKYLE LEIGHZANDER VICENTENo ratings yet
- Ac DC Motor Generator Set Model Ipc-2100-MgDocument52 pagesAc DC Motor Generator Set Model Ipc-2100-MgAhsanNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- ECE Electrical Engineering 2 Marks PDFDocument22 pagesECE Electrical Engineering 2 Marks PDFsivagamiNo ratings yet
- Ee0041l Finals (Fa) KilakigaDocument19 pagesEe0041l Finals (Fa) KilakigaKYLE LEIGHZANDER VICENTENo ratings yet
- Eee NoteDocument4 pagesEee NoteNusaeb Ahmed FarhanNo ratings yet
- ExcitationsysDocument5 pagesExcitationsysDan GrayNo ratings yet
- VivaDocument8 pagesVivasaraneeeNo ratings yet
- ECNG-4010 Lecture 05Document37 pagesECNG-4010 Lecture 05Abel BatuNo ratings yet
- Generator Interview QuestionsDocument12 pagesGenerator Interview QuestionsMuhammad Ali Khan Awan100% (1)
- AGN 173 - Residual Voltage and Residual MagnetismDocument4 pagesAGN 173 - Residual Voltage and Residual MagnetismChamrat TechanithiNo ratings yet
- PEE5L M Experiment 2 Discussion Questions PDocument4 pagesPEE5L M Experiment 2 Discussion Questions Pmoy balgosNo ratings yet
- 3-Point Starter NotesDocument5 pages3-Point Starter NotesBobbyNo ratings yet
- AC Drives and Soft Starter Application GuideDocument5 pagesAC Drives and Soft Starter Application GuideMinh TranNo ratings yet
- Emergency Diesel Generator The Generator, Exciter, and Voltage RegulationDocument34 pagesEmergency Diesel Generator The Generator, Exciter, and Voltage RegulationCarolinaNo ratings yet
- ExcitationDocument4 pagesExcitationDan GrayNo ratings yet
- ExcitationRDocument4 pagesExcitationRDan GrayNo ratings yet
- Total 363 Lab ManualDocument67 pagesTotal 363 Lab ManualBisal Sarker JoyNo ratings yet
- Single PhasingDocument41 pagesSingle PhasingdiljithNo ratings yet
- DC Motor StarterDocument25 pagesDC Motor StarterSrinivasan PrakashNo ratings yet
- DC Generator CharacteristicsDocument25 pagesDC Generator CharacteristicsPratyush100% (1)
- Lab 12 - Universal MotorDocument8 pagesLab 12 - Universal MotorSanjeev Kumar Jha50% (2)
- EE6352 Electrical Engineering and InstruDocument27 pagesEE6352 Electrical Engineering and InstruSaravanan ArulmaniNo ratings yet
- Electrical Interview QuestionDocument74 pagesElectrical Interview Questionaditya pratapNo ratings yet
- Self Excited Induction GeneratorDocument6 pagesSelf Excited Induction Generatorayash mohantyNo ratings yet
- Investigate The DC Motor CharacteristicDocument7 pagesInvestigate The DC Motor CharacteristicAhmar KhanNo ratings yet
- SimulsheshhDocument13 pagesSimulsheshhPaul Brian ferrarisNo ratings yet
- EDCA Module 5Document16 pagesEDCA Module 5Sh PNo ratings yet
- Em Final Full Mp4Document2 pagesEm Final Full Mp4yabiva3045No ratings yet
- Synchronous MotorsDocument12 pagesSynchronous MotorsKaitlyn StylesNo ratings yet
- Resonant DC Link InvertersDocument6 pagesResonant DC Link InvertersSanchit AgarwalNo ratings yet
- Module Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeDocument30 pagesModule Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeOmar DjazzoNo ratings yet
- AlternatorsDocument71 pagesAlternatorsnoveas u. eroisaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Half and Full Wave RectifireDocument14 pagesHalf and Full Wave Rectifireattaullah100% (1)
- SRD-vehicle Traction Applications PDFDocument20 pagesSRD-vehicle Traction Applications PDFEduardo BittencourtNo ratings yet
- The Difference Between KW and KVADocument11 pagesThe Difference Between KW and KVAسحابة صيفNo ratings yet
- User Manual TFP SeriesDocument24 pagesUser Manual TFP SeriesJaekeun Sung0% (1)
- Battery Charge Lester ElectricalDocument8 pagesBattery Charge Lester ElectricaldungnvbsNo ratings yet
- Product Data Bulletin: Power System HarmonicsDocument8 pagesProduct Data Bulletin: Power System HarmonicsIzah FriendsNo ratings yet
- PP904PHEDocument7 pagesPP904PHEKopi143No ratings yet
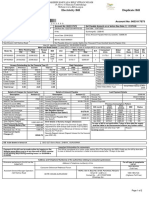
- Electricity Bill House No 113 Sector 38Document2 pagesElectricity Bill House No 113 Sector 38pawan singhalNo ratings yet
- Esign IPS: Reducing Switching Losses in Portable DC/DC ConvertersDocument2 pagesEsign IPS: Reducing Switching Losses in Portable DC/DC ConvertersAbhishek SinghNo ratings yet
- Avtron-K575a DatasheetDocument2 pagesAvtron-K575a DatasheetKarlos Miguel Lopez GomezNo ratings yet
- 48V DC Power Systems: FeaturesDocument2 pages48V DC Power Systems: FeaturesAftab AliNo ratings yet
- Half-Wave Rectifier: Programme: Subject Group MembersDocument22 pagesHalf-Wave Rectifier: Programme: Subject Group MembersBhagyalaxmi patilNo ratings yet
- Report On Power StationDocument83 pagesReport On Power StationIliashAhammedNo ratings yet
- Final Report of The Working Group July 2022 FinalDocument23 pagesFinal Report of The Working Group July 2022 Finalsandy02477No ratings yet
- Harmonic Distortion and Variable Frequency Drives: DefinitionsDocument8 pagesHarmonic Distortion and Variable Frequency Drives: DefinitionsAnonymous SOQFPWBNo ratings yet
- Transfomer ParametersDocument4 pagesTransfomer ParametersSadia Sultana Likhan0% (1)
- Power Electronics Circuit Analysis and DesignDocument683 pagesPower Electronics Circuit Analysis and DesignSameerAhmedNo ratings yet
- High Voltage Engineering (Model Question Paper - 3)Document1 pageHigh Voltage Engineering (Model Question Paper - 3)1DA18EE013Gagana B.RNo ratings yet
- The Basics of Large Dry-Type Transformers - Content Content From Electrical Construction & Maintenance (EC&M) MagazineDocument5 pagesThe Basics of Large Dry-Type Transformers - Content Content From Electrical Construction & Maintenance (EC&M) MagazineRAPRATSINNo ratings yet
- Contactors RelaysDocument22 pagesContactors Relayspradnya sadigaleNo ratings yet
- SPPG+How+to+Apply+for+Electricity+Connection Sep+2016Document138 pagesSPPG+How+to+Apply+for+Electricity+Connection Sep+2016Shaiful ShazwanNo ratings yet
- Electricity Storage and RE For Island PowerDocument48 pagesElectricity Storage and RE For Island PowerFabiana ChusitNo ratings yet
- BEE Tutorial 8Document2 pagesBEE Tutorial 8Atharva NairNo ratings yet
- Introduction To Power System Operation and ControlDocument19 pagesIntroduction To Power System Operation and ControlAbdelrahman MuadiNo ratings yet
- BFP-Turbine-10071-9-V9B-MUSS-00057-Circuit Diagrams 220V DC EOP Starter Panel (BFPTurbine)Document18 pagesBFP-Turbine-10071-9-V9B-MUSS-00057-Circuit Diagrams 220V DC EOP Starter Panel (BFPTurbine)mohamed abouraya100% (1)
- Ew05 Manual enDocument3 pagesEw05 Manual enabuzer1981No ratings yet
- P643-T2 GregarDocument25 pagesP643-T2 Gregarcj.karthikNo ratings yet
- EATON - Heavy Duty Safety SwitchDocument93 pagesEATON - Heavy Duty Safety SwitchomarlgonzNo ratings yet