Download as docx, pdf, or txt
You might also like
- The Couples Activity Book 70 Interactive Games To Strengthen Your Relationship (Crystal Schwanke) (Z-Library)Document183 pagesThe Couples Activity Book 70 Interactive Games To Strengthen Your Relationship (Crystal Schwanke) (Z-Library)Tammi McCurdy100% (1)
- Obstacle Avoidance Robot Using Verilog CodeDocument14 pagesObstacle Avoidance Robot Using Verilog Codecdiyyala50% (4)
- Microcontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaDocument10 pagesMicrocontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaBIniamNo ratings yet
- MB 210Document98 pagesMB 210Safan MominNo ratings yet
- A Report of Mini Project Line Following Robot Car Using ArdinoDocument10 pagesA Report of Mini Project Line Following Robot Car Using Ardinorao asad0% (1)
- Line Controlled RobotDocument27 pagesLine Controlled RobotchaitanyaNo ratings yet
- Technical Report of Building A Line Follower RobotDocument6 pagesTechnical Report of Building A Line Follower RobotLuizNo ratings yet
- 1354189340-GSM 41 C Eng.Document39 pages1354189340-GSM 41 C Eng.gfg fgfgf100% (1)
- Hi-Tech Line Follower Using Pid Control: Kamaljeet, Gurpreet Kaur, Lokesh YadavDocument5 pagesHi-Tech Line Follower Using Pid Control: Kamaljeet, Gurpreet Kaur, Lokesh YadavArtyom FreemanNo ratings yet
- Prosiding Paper 2010 EditDocument4 pagesProsiding Paper 2010 EditNizam RashidNo ratings yet
- Line Follower RobotDocument5 pagesLine Follower RobotrameshmarellaNo ratings yet
- B.M.S. Institute of Technology and Management: Line Follower RobotDocument1 pageB.M.S. Institute of Technology and Management: Line Follower RobotRitik Raj SrivastavaNo ratings yet
- Advance Line Following Robot: Shivam Singh, Prashant KumarDocument3 pagesAdvance Line Following Robot: Shivam Singh, Prashant Kumaranil kasot100% (1)
- Digital Signal FilteringDocument8 pagesDigital Signal FilteringNhoj Leahcim Sasuab ZeugirdorNo ratings yet
- Project Presentation PDFDocument22 pagesProject Presentation PDFARIF KANONNo ratings yet
- Design and Implementation of Autonomous Line Follower Robot Using MicrocontrollerDocument4 pagesDesign and Implementation of Autonomous Line Follower Robot Using MicrocontrollerVASANTHKUMAR M SNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotRohit sharmaNo ratings yet
- Final Paper MikimikimikiDocument8 pagesFinal Paper MikimikimikiNhoj Leahcim Sasuab ZeugirdorNo ratings yet
- Welcome To RoboticsDocument20 pagesWelcome To Roboticsamrita1415No ratings yet
- FINAL PROJECT REVIEW (1)Document34 pagesFINAL PROJECT REVIEW (1)RK naiduNo ratings yet
- Co Project: Edge Avoiding Robot USING 8051 MicrocontrollerDocument14 pagesCo Project: Edge Avoiding Robot USING 8051 MicrocontrollerJuthik BVNo ratings yet
- Line - Following - Robot 2019 09 11 12 49 PDFDocument3 pagesLine - Following - Robot 2019 09 11 12 49 PDFMegharaj GoudarNo ratings yet
- Autonomous Navigation and 2d Mapping Using SONARDocument5 pagesAutonomous Navigation and 2d Mapping Using SONARShubass RameshNo ratings yet
- ArduinoDocument9 pagesArduinoThirdy LuchingNo ratings yet
- Restaurant BOTSDocument8 pagesRestaurant BOTSSaudin TantriNo ratings yet
- Research Report - CEPDocument3 pagesResearch Report - CEPFahad AliNo ratings yet
- LFR ReportDocument9 pagesLFR ReportBilal ShafiNo ratings yet
- Ijret - Implementation of Pid Control To Reduce Wobbling in A Line Following RobotDocument5 pagesIjret - Implementation of Pid Control To Reduce Wobbling in A Line Following RobotInternational Journal of Research in Engineering and TechnologyNo ratings yet
- 21.line Following RobotDocument78 pages21.line Following RobotsathishNo ratings yet
- The Line Follower - And-Pick and Place Robot.: International Research Journal of Engineering and Technology (IRJET)Document6 pagesThe Line Follower - And-Pick and Place Robot.: International Research Journal of Engineering and Technology (IRJET)VASANTHKUMAR M SNo ratings yet
- InfoMatrix Abstract PocketBot Project - Ondrej Stanek CZDocument5 pagesInfoMatrix Abstract PocketBot Project - Ondrej Stanek CZLita ClaudiuNo ratings yet
- Project ReportDocument10 pagesProject ReportchaitanyaNo ratings yet
- Project Report: Line Following RobotDocument12 pagesProject Report: Line Following RobotAhsan MuradNo ratings yet
- Line Follower - 180842Document39 pagesLine Follower - 180842Zara SaeedNo ratings yet
- VSrimukhi BJPremPrasannaKumar DVSPrasad 49Document4 pagesVSrimukhi BJPremPrasannaKumar DVSPrasad 49Abhay BhujNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotSebastian NistoricăNo ratings yet
- On Minor ProjectDocument21 pagesOn Minor ProjectMANISHA S67% (3)
- A Line Follower Robot From Design To Implementation - Technical Issues and ProblemsDocument5 pagesA Line Follower Robot From Design To Implementation - Technical Issues and ProblemsAhmad AfnanNo ratings yet
- Smart Stick For Blind Man: Nitish Sukhija, Shruti Taksali, Mohit Jain and Rahul KumawatDocument8 pagesSmart Stick For Blind Man: Nitish Sukhija, Shruti Taksali, Mohit Jain and Rahul KumawatE-zat IlmanNo ratings yet
- Line Follower Robot Final PPT 1Document16 pagesLine Follower Robot Final PPT 1harshil mangeNo ratings yet
- Line Follower Robot Is A Mobile Machine That Can Detect and Follow Line Which Is Drawn On The FloorDocument54 pagesLine Follower Robot Is A Mobile Machine That Can Detect and Follow Line Which Is Drawn On The FloorHasna AbdelwahabNo ratings yet
- Bluetooth Technology Based Wireless War Field Robot With Night Vision CameraDocument4 pagesBluetooth Technology Based Wireless War Field Robot With Night Vision CameraPranesh JewalikarNo ratings yet
- PC Regimented Defense Android Using Zigbee: Dandu Gowthami, V.V.G.S.Rajendra PrasadDocument4 pagesPC Regimented Defense Android Using Zigbee: Dandu Gowthami, V.V.G.S.Rajendra PrasadRam BadhuNo ratings yet
- Mid Ass 1Document3 pagesMid Ass 1Shuvro Sankar SenNo ratings yet
- Bluetooth Controlled Arduino Based Robotic Arm: Srija Dasgupta Avirup Ghosh Debraj ChatterjeeDocument6 pagesBluetooth Controlled Arduino Based Robotic Arm: Srija Dasgupta Avirup Ghosh Debraj ChatterjeeKarneshwar SannamaniNo ratings yet
- Pavani Mini Project - 115817Document23 pagesPavani Mini Project - 115817Yelagum RahulNo ratings yet
- Mash - 2:the Spy Robot:: Mulititasking: Active and Remote Controlled: Sensing: HardwareDocument51 pagesMash - 2:the Spy Robot:: Mulititasking: Active and Remote Controlled: Sensing: Hardwarerahul9981759900No ratings yet
- Speech Recognition System For A Voice CoDocument5 pagesSpeech Recognition System For A Voice Cosyiham487No ratings yet
- Line FollowerDocument37 pagesLine FollowerZara SaeedNo ratings yet
- Robotics - 2Document65 pagesRobotics - 2chandansonics06No ratings yet
- Smart Floor Cleaner Robot Using AndroidDocument5 pagesSmart Floor Cleaner Robot Using AndroidTejas chogale100% (1)
- Midnight Blue Gold Fun Patterns and Illustrations Tech Predictions Presentation Party-1Document13 pagesMidnight Blue Gold Fun Patterns and Illustrations Tech Predictions Presentation Party-1KAKI V N S V VIGNESH CSEUG-2020No ratings yet
- House Cleaning Robot: Digital Assignment - I Iot System ArchitectureDocument6 pagesHouse Cleaning Robot: Digital Assignment - I Iot System Architecturescanning &No ratings yet
- Line FollowerDocument15 pagesLine FollowerShivam VaishnavNo ratings yet
- Line Following RobotDocument19 pagesLine Following RobotHarini100% (1)
- Asfand Kamran LFR ReportDocument13 pagesAsfand Kamran LFR ReportAbdul RaufNo ratings yet
- InfoMatrix Abstract PocketBot Project - Ondrej Stanek CZDocument5 pagesInfoMatrix Abstract PocketBot Project - Ondrej Stanek CZElaNo ratings yet
- OoooooDocument21 pagesOooooojamsheer4462No ratings yet
- Report IoT PDFDocument3 pagesReport IoT PDFArshNo ratings yet
- Full Paper of Arduino Based Obstacle Avoidance RobotDocument3 pagesFull Paper of Arduino Based Obstacle Avoidance RobotsabahatNo ratings yet
- Speech Recognition System For A Voice Controlled Robot With Real Time Obstacle Detection and AvoidanceDocument5 pagesSpeech Recognition System For A Voice Controlled Robot With Real Time Obstacle Detection and AvoidanceMansi YadavNo ratings yet
- Alsahafi Line RobotDocument11 pagesAlsahafi Line Robotمحمد عبد الوهابNo ratings yet
- Intro To PSDM With ExcelDocument10 pagesIntro To PSDM With ExcelVishnu KanthNo ratings yet
- Promaster Tsuno Chronograph Racer - Setting - GuideDocument1 pagePromaster Tsuno Chronograph Racer - Setting - GuideAlexis BejarNo ratings yet
- Drawing - Boll & Kirch Filterbau GMBHDocument7 pagesDrawing - Boll & Kirch Filterbau GMBHolegmartynov90No ratings yet
- 2019 Iccmf-Cm ProgramDocument5 pages2019 Iccmf-Cm ProgramAmine SbNo ratings yet
- 2 8 Excel Pivot Table ExamplesDocument17 pages2 8 Excel Pivot Table ExamplesmajestyvayohNo ratings yet
- Efficient Very Large-Scale Integration Architecture Design of Proportionate-Type Least Mean Square Adaptive FiltersDocument7 pagesEfficient Very Large-Scale Integration Architecture Design of Proportionate-Type Least Mean Square Adaptive FiltersIJRES teamNo ratings yet
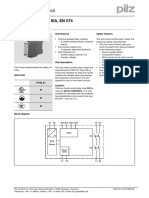
- P1HZ X1 enDocument6 pagesP1HZ X1 enDiiani AmayaNo ratings yet
- EXPERIMENT 3: Single Phase Transformer: Part A: Off-Load, Loaded, Short-CircuitDocument9 pagesEXPERIMENT 3: Single Phase Transformer: Part A: Off-Load, Loaded, Short-CircuitCHERUYIOT IANNo ratings yet
- Proposal For Computer Based Exam ApplicationDocument8 pagesProposal For Computer Based Exam ApplicationdaniNo ratings yet
- Online-Grading-System - StudiesDocument31 pagesOnline-Grading-System - Studiescharimaine hernandezNo ratings yet
- Info Bermedi X-DryDocument2 pagesInfo Bermedi X-Drydumitrescu emilNo ratings yet
- Lagrange InterpolationDocument18 pagesLagrange InterpolationdiviyabhavaaniNo ratings yet
- RTPA ConfigDocument3 pagesRTPA Configsoufiane amraniNo ratings yet
- ABC Hospital - SolutionDocument12 pagesABC Hospital - SolutionMayank Patel100% (1)
- Technical Manual - System Description HUAWEI HLR9820 Home Location RegisterDocument45 pagesTechnical Manual - System Description HUAWEI HLR9820 Home Location RegisterRaufrmzNo ratings yet
- St. Sr. School: Paul'sDocument4 pagesSt. Sr. School: Paul'sAmisha GuptaNo ratings yet
- American National StandardDocument52 pagesAmerican National StandardALEX ROSARIO ANGELESNo ratings yet
- Objective: How To Use WPF To Do A Simple AnimationDocument4 pagesObjective: How To Use WPF To Do A Simple Animationsurajss8585No ratings yet
- Technical Specification: 12-SeriesDocument13 pagesTechnical Specification: 12-SeriesKhantoNo ratings yet
- BPC Biocistem EspectroDocument41 pagesBPC Biocistem EspectroBenigno C. SolisNo ratings yet
- Software Development MethodologiesDocument26 pagesSoftware Development MethodologiesNana K. SarpongNo ratings yet
- Evaluate The Quality Assurance (QA) Process and Review How It Was Implemented During Your Design and Development StagesDocument7 pagesEvaluate The Quality Assurance (QA) Process and Review How It Was Implemented During Your Design and Development StagesKaveesha PereraNo ratings yet
- Inspection at LC Gate: S.No Items Checked Observations/Irregularities Action To Be Taken byDocument3 pagesInspection at LC Gate: S.No Items Checked Observations/Irregularities Action To Be Taken byMadhav PrasadNo ratings yet
- Lab 10 2022 2Document4 pagesLab 10 2022 2CuongNo ratings yet
- Catalogo Elastimold RelsamexDocument98 pagesCatalogo Elastimold RelsamexReficul Antonio López Tristán100% (1)
- Iso9001 Manual With ProcedureDocument105 pagesIso9001 Manual With ProcedureAshwin KumarNo ratings yet
- Image Captionbot For Assistive TechnologyDocument3 pagesImage Captionbot For Assistive TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet