Download as pdf or txt
You might also like
- Drew Martin Utility BillDocument1 pageDrew Martin Utility BillMelon ChanceNo ratings yet
- TK 20 Equipo 719Document13 pagesTK 20 Equipo 719jorgeNo ratings yet
- Low Cost Digital Signal Generation For Driving Space Vector PWM InverterDocument12 pagesLow Cost Digital Signal Generation For Driving Space Vector PWM InverterJunaid AhmadNo ratings yet
- Karampuri 2016Document6 pagesKarampuri 2016Kill MongerNo ratings yet
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerDocument12 pagesDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaNo ratings yet
- A Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsDocument9 pagesA Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsInternational Journal of Engineering Inventions (IJEI)No ratings yet
- A Vector Controlled Induction Motor Drive With Neural Network Based Space Vector Pulse Width ModulatorDocument8 pagesA Vector Controlled Induction Motor Drive With Neural Network Based Space Vector Pulse Width ModulatorTiruchengode VinothNo ratings yet
- SVPWM PDFDocument5 pagesSVPWM PDFmauricetappaNo ratings yet
- A SVM Based Four-Level Open-End Winding-Induction Motor Drive With Voltage Balancing of DC-link Capacitors Using SVM Based HCC Front-End ConverterDocument5 pagesA SVM Based Four-Level Open-End Winding-Induction Motor Drive With Voltage Balancing of DC-link Capacitors Using SVM Based HCC Front-End ConverterGanesh ChallaNo ratings yet
- Space Vector PWM - 3Document6 pagesSpace Vector PWM - 3guanitouNo ratings yet
- 06125602Document6 pages06125602Ahmad Sadam SyaeroziNo ratings yet
- Mali 2019Document7 pagesMali 2019aymenNo ratings yet
- Space Vector Pulse Width Modulation Based Two Level InverterDocument6 pagesSpace Vector Pulse Width Modulation Based Two Level InverterSyed Muhammad Sharif NaqviNo ratings yet
- SVPWM Scheme For Two-Level and Three Level Inverter Fed Induction Motor DriveDocument6 pagesSVPWM Scheme For Two-Level and Three Level Inverter Fed Induction Motor DriveEzra NaveenaNo ratings yet
- Common Voltage Eliminating of SVM Diode Clamping Three-Level Inverter Connected To GridDocument4 pagesCommon Voltage Eliminating of SVM Diode Clamping Three-Level Inverter Connected To GridveguruprasadNo ratings yet
- Paper PublishDocument14 pagesPaper PublishAshish PorwalNo ratings yet
- Analysis of Space Vector PWM For Three Phase Inverter and Comparison With SPWMDocument8 pagesAnalysis of Space Vector PWM For Three Phase Inverter and Comparison With SPWMАлексей ЯмаNo ratings yet
- Implementation of SVPWM Control On FPGA For Three Phase MATRIX CONVERTERDocument6 pagesImplementation of SVPWM Control On FPGA For Three Phase MATRIX CONVERTERIDESNo ratings yet
- WTHD and Power Quality Analysis of Space Vector Modulated Voltage Source Inverters For WecsDocument7 pagesWTHD and Power Quality Analysis of Space Vector Modulated Voltage Source Inverters For Wecsdaiduongxanh14113No ratings yet
- Effect of Zero-Vector Placement in A Dual-Inverter PDFDocument9 pagesEffect of Zero-Vector Placement in A Dual-Inverter PDFramunitNo ratings yet
- Comparison of SPWM and SVPWM Scheme For Two-Level Inverter Fed Induction Motor DriveDocument6 pagesComparison of SPWM and SVPWM Scheme For Two-Level Inverter Fed Induction Motor Drivemanish_er570No ratings yet
- Ramchand 2010Document13 pagesRamchand 2010ra behNo ratings yet
- Permanent Magnet Synchronous Motor Drive Based On Maximum Boost Control Z-Source SVPWMDocument8 pagesPermanent Magnet Synchronous Motor Drive Based On Maximum Boost Control Z-Source SVPWMQamilNo ratings yet
- Comparative Analysis of Field Oriented Control of BLDC Motor Using SPWM and SVPWM TechniquesDocument6 pagesComparative Analysis of Field Oriented Control of BLDC Motor Using SPWM and SVPWM TechniquesJosé ArrascaitaNo ratings yet
- Simulation and Comparison of SPWM and SVPWM Control For Two Level InverterDocument6 pagesSimulation and Comparison of SPWM and SVPWM Control For Two Level InverterIkram RidhoNo ratings yet
- Matlab-Simulink Model Three-Phase Voltage Source InverterDocument5 pagesMatlab-Simulink Model Three-Phase Voltage Source InverterDương Tấn TàiNo ratings yet
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorDocument7 pagesA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesNo ratings yet
- IEEE PEDS 5LEVEL ShinyDocument6 pagesIEEE PEDS 5LEVEL Shinymahmoud yarahmadiNo ratings yet
- Hysteresis ControllerDocument9 pagesHysteresis ControllerengrarNo ratings yet
- Topologies of Converters For Two-Phase AC MotorsDocument6 pagesTopologies of Converters For Two-Phase AC MotorsNickNo ratings yet
- Space Vector Pulse Width Modulation Schemes For Two-Level Voltage Source InverterDocument5 pagesSpace Vector Pulse Width Modulation Schemes For Two-Level Voltage Source InverterIDESNo ratings yet
- An SVM Algorithm To Balance The Capacitor Voltages of The Three-Level NPC APFDocument9 pagesAn SVM Algorithm To Balance The Capacitor Voltages of The Three-Level NPC APFTran Quoc HoanNo ratings yet
- Optimum Space Vector PWM Algorithm For Three-Level Inverter: B. Urmila and D. Subba RayuduDocument13 pagesOptimum Space Vector PWM Algorithm For Three-Level Inverter: B. Urmila and D. Subba RayudusureshonuNo ratings yet
- Implementation of A Fuzzy PI Controller For Speed Control of Induction Motors Using FPGADocument7 pagesImplementation of A Fuzzy PI Controller For Speed Control of Induction Motors Using FPGABharati RajaNo ratings yet
- A New Mathematical Model and Control of A Three-Phase AC-DC Voltage Source ConverterDocument8 pagesA New Mathematical Model and Control of A Three-Phase AC-DC Voltage Source ConverterVenktesh MishraNo ratings yet
- FQC IISC-250kvaDocument23 pagesFQC IISC-250kvaDeepak GehlotNo ratings yet
- A Novel Scheme To Eliminate Common Mode Voltage in Multilevel InvertersDocument4 pagesA Novel Scheme To Eliminate Common Mode Voltage in Multilevel InvertersJavier MaldonadoNo ratings yet
- Decoupled Space-Vector PWM Strategies For A Four-Level Asymmetrical Open-End Winding Induction Motor Drive With Waveform SymmetriesDocument12 pagesDecoupled Space-Vector PWM Strategies For A Four-Level Asymmetrical Open-End Winding Induction Motor Drive With Waveform SymmetriesGanesh ChallaNo ratings yet
- Space-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationDocument8 pagesSpace-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationinfodotzNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document7 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Modified Space Vector Pulse Width Modulation For Z-Source InvertersDocument3 pagesModified Space Vector Pulse Width Modulation For Z-Source InvertersRamana ReddyNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological Universitymec091ownerNo ratings yet
- Paper 2 - PEL20120014 - 2ndDocument5 pagesPaper 2 - PEL20120014 - 2ndSherif M. DabourNo ratings yet
- A Control Scheme of Three Phase Solid State Transformer For PV Generation Based On Improved Voltage-Tracking Method of DC LinksDocument6 pagesA Control Scheme of Three Phase Solid State Transformer For PV Generation Based On Improved Voltage-Tracking Method of DC LinksCamila MurilloNo ratings yet
- Novel SVPWM Strategy Considering DC-link Balancing For A Multi-Level Voltage Source InverterDocument6 pagesNovel SVPWM Strategy Considering DC-link Balancing For A Multi-Level Voltage Source InvertermücahitNo ratings yet
- Cascaded Three-Level Inverters With Synchronized Space-Vector ModulationDocument8 pagesCascaded Three-Level Inverters With Synchronized Space-Vector ModulationkalimaheshwariNo ratings yet
- Ijret - Study of Sinusoidal and Space Vector Pulse Width Modulation Techniques For A Cascaded Three-Level InverterDocument6 pagesIjret - Study of Sinusoidal and Space Vector Pulse Width Modulation Techniques For A Cascaded Three-Level InverterInternational Journal of Research in Engineering and TechnologyNo ratings yet
- SVPWM VTRDocument14 pagesSVPWM VTRAtiqMarwatNo ratings yet
- Three Level InverterDocument5 pagesThree Level InverterManish PrajapatiNo ratings yet
- Vector Control of Three Phase AC - DC Front-End ConverterDocument23 pagesVector Control of Three Phase AC - DC Front-End ConverterRia AlexNo ratings yet
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Document15 pagesIjeet: International Journal of Electrical Engineering & Technology (Ijeet)Koukou AmkoukouNo ratings yet
- Space Vector Pulse Width Modulation-Libre PDFDocument6 pagesSpace Vector Pulse Width Modulation-Libre PDFlongNo ratings yet
- Comparative Study of MLI and Dual Inverter Using Space Vector Modulation TechniquesDocument8 pagesComparative Study of MLI and Dual Inverter Using Space Vector Modulation Techniquesshiva256No ratings yet
- Inverter and SV-PWMDocument5 pagesInverter and SV-PWMcoep05No ratings yet
- Speed Control of Space Vector Modulated Inverter Driven Induction MotorDocument11 pagesSpeed Control of Space Vector Modulated Inverter Driven Induction MotorPraba HaranNo ratings yet
- Real Time Implementation of Space Vector Pulse Width Modulation Using Arduino DUE BoardDocument6 pagesReal Time Implementation of Space Vector Pulse Width Modulation Using Arduino DUE BoardDaniel PinedaNo ratings yet
- Simulation of A Space Vector PWM Controller For A Five-Level Voltage-Fed Inverter Motor DriveDocument7 pagesSimulation of A Space Vector PWM Controller For A Five-Level Voltage-Fed Inverter Motor DriveIOSRjournalNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- IEEE PEDS 5LEVEL ShinyDocument6 pagesIEEE PEDS 5LEVEL Shinymahmoud yarahmadiNo ratings yet
- 3D Printed CoilsDocument2 pages3D Printed Coilsmahmoud yarahmadiNo ratings yet
- Induction Heating Principle and ApplicationsDocument9 pagesInduction Heating Principle and Applicationsmahmoud yarahmadiNo ratings yet
- A Hybrid Polygonal SV Structure For TheDocument13 pagesA Hybrid Polygonal SV Structure For Themahmoud yarahmadiNo ratings yet
- Product 21933Document1 pageProduct 21933mahmoud yarahmadiNo ratings yet
- Emmedi Product Sheet MosWeld-1Document2 pagesEmmedi Product Sheet MosWeld-1mahmoud yarahmadiNo ratings yet
- Numerical Simulation of Tube Manufacturing ConsistDocument15 pagesNumerical Simulation of Tube Manufacturing Consistmahmoud yarahmadiNo ratings yet
- EP Big Bore Installation Instruction Rev4Document8 pagesEP Big Bore Installation Instruction Rev4mahmoud yarahmadiNo ratings yet
- High Frequency Induction Tube and Pipe Welding SolutionsDocument24 pagesHigh Frequency Induction Tube and Pipe Welding Solutionsmahmoud yarahmadiNo ratings yet
- Analysis of Induction Heating System For High FreqDocument10 pagesAnalysis of Induction Heating System For High Freqmahmoud yarahmadiNo ratings yet
- Pure Inductive Circuit AND L R Circuit: Nimisha Lonees K Ac Circuit-Electronics 2020-2021Document15 pagesPure Inductive Circuit AND L R Circuit: Nimisha Lonees K Ac Circuit-Electronics 2020-2021mahmoud yarahmadiNo ratings yet
- Unit 4 Lesson 4Document7 pagesUnit 4 Lesson 4mahmoud yarahmadiNo ratings yet
- Ingecon Sun 3825tl C Series enDocument4 pagesIngecon Sun 3825tl C Series enafshin keshtkarNo ratings yet
- BEE MCQ CH 2 Part 1Document6 pagesBEE MCQ CH 2 Part 1Ashmit RaghavNo ratings yet
- Hydrogen Storage in Porous Silicon - A ReviewDocument12 pagesHydrogen Storage in Porous Silicon - A Reviewgabriela plaiasuNo ratings yet
- Eaton Brass Products Master CatalogDocument168 pagesEaton Brass Products Master CatalogankitNo ratings yet
- Clean Energy ThesisDocument5 pagesClean Energy Thesisgbrgvvfr100% (2)
- REC670 Version 2.2 IEC Application ManualDocument632 pagesREC670 Version 2.2 IEC Application ManualkormantasNo ratings yet
- 10kw 72v F AdapterDocument1 page10kw 72v F AdapterDUCKNo ratings yet
- FABRICATION OF BIO GAS PRODUCTION IN COLLEGE CANTEEN WASTE 1st REVIEWDocument13 pagesFABRICATION OF BIO GAS PRODUCTION IN COLLEGE CANTEEN WASTE 1st REVIEWAnonymous Clyy9NNo ratings yet
- Alpha Laval Heat Exchangers DatasheetDocument18 pagesAlpha Laval Heat Exchangers Datasheetjosimarj272No ratings yet
- كتالوج لخلايا الضغط المتوسط وقواطع الدوره لشركةDocument109 pagesكتالوج لخلايا الضغط المتوسط وقواطع الدوره لشركةm khNo ratings yet
- Sp540 (V) Vol. v.1 - Bid Drawings (Electrical Works) 1Document142 pagesSp540 (V) Vol. v.1 - Bid Drawings (Electrical Works) 1Jay Dee (JSD)No ratings yet
- Ten00695 00Document491 pagesTen00695 00xuan50% (2)
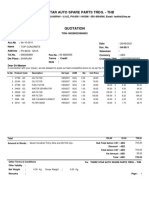
- Three Star Auto Spare Parts Trdg. - THB: 04-10-0011 26/08/2021 Top Concrete PO - BOX: 12515 050305999 06 8823055Document1 pageThree Star Auto Spare Parts Trdg. - THB: 04-10-0011 26/08/2021 Top Concrete PO - BOX: 12515 050305999 06 8823055syed ahmedNo ratings yet
- SH80 3BDocument6 pagesSH80 3BBilal VURALNo ratings yet
- Applied Thermal Engineering: Yu-Wei Chang, Chih-Chung Chang, Ming-Tsun Ke, Sih-Li ChenDocument7 pagesApplied Thermal Engineering: Yu-Wei Chang, Chih-Chung Chang, Ming-Tsun Ke, Sih-Li ChenVishnuShantanNo ratings yet
- Electric Vehicle 4th ModuleDocument13 pagesElectric Vehicle 4th ModuleAmruth DeshpandeNo ratings yet
- ML Ai in Gas Hydrate Exploration and Production ASSIGNMENT PDFDocument30 pagesML Ai in Gas Hydrate Exploration and Production ASSIGNMENT PDFAnurag TopnoNo ratings yet
- Organic Chemistry 9Th Edition Carey Test Bank Full Chapter PDFDocument38 pagesOrganic Chemistry 9Th Edition Carey Test Bank Full Chapter PDFmisstepmonocarp1b69100% (9)
- BLOCK STU 63-2x115Document2 pagesBLOCK STU 63-2x115Lod 1No ratings yet
- Electricity Generation From Citrofortunella Microcarpa Calamansi and Musa Balbisiana Saba Banana Using Dual Chamber Microbial Fuel CellDocument25 pagesElectricity Generation From Citrofortunella Microcarpa Calamansi and Musa Balbisiana Saba Banana Using Dual Chamber Microbial Fuel CellHarrie Floyd C. LelisNo ratings yet
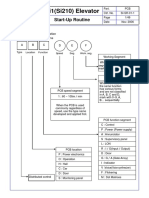
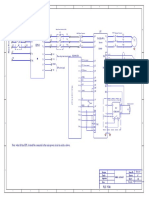
- Sigma Lg-Otis Di1 (Si210) PCBDocument49 pagesSigma Lg-Otis Di1 (Si210) PCBVilla Robert RamoaNo ratings yet
- Graphitic Carbon Nitride (g-C3N4) Synthesis and Heterostructures, Principles, Mechanisms, and RecentDocument21 pagesGraphitic Carbon Nitride (g-C3N4) Synthesis and Heterostructures, Principles, Mechanisms, and RecentCamilo GonzalezNo ratings yet
- 600 A 35 KV Class BOL-T™ Deadbreak Connector: Cooper PowerDocument8 pages600 A 35 KV Class BOL-T™ Deadbreak Connector: Cooper PowerAlvaro DiazNo ratings yet
- Insepction & Test Chart For Engine Room High Pressure Co System New InstallationDocument3 pagesInsepction & Test Chart For Engine Room High Pressure Co System New InstallationLuiz Felipe LobatoNo ratings yet
- Electric Drawing-FR2000Document19 pagesElectric Drawing-FR2000MuMoMa100% (1)
- NYC Amendments To The 1999 NEC: No Section Title Description of ChangeDocument15 pagesNYC Amendments To The 1999 NEC: No Section Title Description of ChangeGalih TrisnanugrahaNo ratings yet
- Passos Et Al. - 2017 - Towards Energy Neutral Microalgae-Based Wastewater Treatment PlantsDocument9 pagesPassos Et Al. - 2017 - Towards Energy Neutral Microalgae-Based Wastewater Treatment PlantsfvassisNo ratings yet
- Zabihullah Mohammadi - 22149 (Smart City - Assignment)Document14 pagesZabihullah Mohammadi - 22149 (Smart City - Assignment)zabi ullah MohammadiNo ratings yet