Download as pdf or txt
You might also like
- DD2 SalariesDocument54 pagesDD2 SalariesLive 5 News100% (1)
- Ca 800Document83 pagesCa 800Pablo CzNo ratings yet
- What Got You Here Won't Get You ThereDocument6 pagesWhat Got You Here Won't Get You Thereshri120950% (2)
- NEMA IEC Body Phantom SetDocument1 pageNEMA IEC Body Phantom SetdridiNo ratings yet
- Lesson 21: Analog To Digital Conversion: ObjectivesDocument11 pagesLesson 21: Analog To Digital Conversion: Objectivesatif_aman123100% (1)
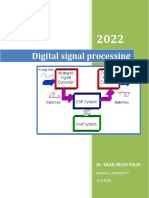
- Digital Signal Processing: Dr. MuayadDocument18 pagesDigital Signal Processing: Dr. MuayadAli KareemNo ratings yet
- DSP Unit1Document16 pagesDSP Unit1Charlton ChristNo ratings yet
- Part 02 A - Signal Generation With WinIQSIM v0Document13 pagesPart 02 A - Signal Generation With WinIQSIM v0Thierry IRIENo ratings yet
- PresentationDocument20 pagesPresentationDiane GutierrezNo ratings yet
- ..Document15 pages..Fidel Cabiles100% (1)
- Introduction To Digital Signal ProcessingDocument12 pagesIntroduction To Digital Signal ProcessingJulio Adalberto MIltoNo ratings yet
- DSP Presentation 1Document31 pagesDSP Presentation 1soumikchatterjee1912No ratings yet
- مادة الكويز الأولDocument9 pagesمادة الكويز الأولzaina muhtasebNo ratings yet
- Ambardar Book ChaptersDocument809 pagesAmbardar Book ChaptersJeffrey Hufford100% (1)
- Analog To Digital ConversionDocument11 pagesAnalog To Digital Conversionsaurabh2078No ratings yet
- Digital Audio Technology: Magnetic Flux or No Flux Optical Reflection Off of A Surface or No ReflectionDocument11 pagesDigital Audio Technology: Magnetic Flux or No Flux Optical Reflection Off of A Surface or No ReflectionKhaled RelaTivNo ratings yet
- AAMEC/VII SEM/CSE/CS 2403 DSP (Degree Scoring Paper)Document25 pagesAAMEC/VII SEM/CSE/CS 2403 DSP (Degree Scoring Paper)barithaNo ratings yet
- 07a Fourier AnalysisDocument20 pages07a Fourier AnalysisPersonOverTwoNo ratings yet
- VivaDocument7 pagesVivaJobin Philip VargheseNo ratings yet
- Lecture - 1 Digital Signal ProcessDocument8 pagesLecture - 1 Digital Signal ProcessSaif AlabdullahNo ratings yet
- Digital Communication ExercisesDocument11 pagesDigital Communication ExercisesalinasgzanNo ratings yet
- Signal and Production of Signal: Digital Signal (Figure 1b) Refers To MoreDocument4 pagesSignal and Production of Signal: Digital Signal (Figure 1b) Refers To MoreDarren GegantinoNo ratings yet
- Chapter-6 Seismic Data ProcessingDocument19 pagesChapter-6 Seismic Data Processingtarunag72801No ratings yet
- 1 Bit Sigma Delta ADC DesignDocument10 pages1 Bit Sigma Delta ADC DesignNishant SinghNo ratings yet
- Digital SignalDocument42 pagesDigital SignalRuby ManauisNo ratings yet
- Simplified Analogue Realization of The Digital Direct Synthesis (DDS) Technique For Signal GenerationDocument5 pagesSimplified Analogue Realization of The Digital Direct Synthesis (DDS) Technique For Signal GenerationInternational Organization of Scientific Research (IOSR)No ratings yet
- Statistics and Probability Are Used in Digital Signal Processing To Characterize Signals and TheprocessesDocument63 pagesStatistics and Probability Are Used in Digital Signal Processing To Characterize Signals and Theprocesses1985 productionNo ratings yet
- Analogue Communication 1Document69 pagesAnalogue Communication 1Malu SakthiNo ratings yet
- Data Communication FundamentalsDocument12 pagesData Communication Fundamentalslele peterNo ratings yet
- Digital Signal Processing: Mustansiriyah University College of Engineering Electrical Engineering Department 4 ClassDocument60 pagesDigital Signal Processing: Mustansiriyah University College of Engineering Electrical Engineering Department 4 ClassPreethi ReddyNo ratings yet
- Signals Spectra MidtermDocument37 pagesSignals Spectra MidtermchienikolaoNo ratings yet
- Digital Signal ProcessingDocument11 pagesDigital Signal Processingaravind44555No ratings yet
- Digital Signal Processing (DSP)Document3 pagesDigital Signal Processing (DSP)drkreddy888No ratings yet
- Num DistDocument5 pagesNum DistYermakov Vadim IvanovichNo ratings yet
- The Work Presented Below Is Solely Based Upon Our Research and We Ought Responsibility For It' AuthenticityDocument22 pagesThe Work Presented Below Is Solely Based Upon Our Research and We Ought Responsibility For It' AuthenticityFahad RizwanNo ratings yet
- ECE 7 ActivityDocument4 pagesECE 7 Activitywilmar cadungogNo ratings yet
- TechnicalReview1977 1Document34 pagesTechnicalReview1977 1mastelecentroNo ratings yet
- Digital Signal Processing PDFDocument6 pagesDigital Signal Processing PDFkarthikeyan0% (1)
- Frequency Modulation On Audio Signal Sad Fatima ShahjahanDocument6 pagesFrequency Modulation On Audio Signal Sad Fatima Shahjahantayybahaseeb18No ratings yet
- Chapter 3 - 1 Physical LayerDocument30 pagesChapter 3 - 1 Physical Layerhenok metaferiaNo ratings yet
- Dds IntroDocument6 pagesDds IntroYermakov Vadim IvanovichNo ratings yet
- Design of FIR Filter Using Verilog HDLDocument43 pagesDesign of FIR Filter Using Verilog HDLKarthik Kodali71% (24)
- Digital Signal Processing Mid1Document123 pagesDigital Signal Processing Mid1ANISH HALDERNo ratings yet
- Mca 203Document234 pagesMca 203RajasekarNo ratings yet
- Ee8591 NotesDocument115 pagesEe8591 Notessyed1188No ratings yet
- Lecture Notes ٠٧٢٨٣٢Document154 pagesLecture Notes ٠٧٢٨٣٢العراق العظيمNo ratings yet
- Chapter 2 Review of Signal and SystemDocument37 pagesChapter 2 Review of Signal and Systemfarina ilyanaNo ratings yet
- Lec 1Document3 pagesLec 1Anshu AgarwalNo ratings yet
- DSP Notes Unit1 4Document114 pagesDSP Notes Unit1 4Reegan BoseNo ratings yet
- Introduction To Discrete Time Signals & SystemDocument119 pagesIntroduction To Discrete Time Signals & SystemMahesh Abnave100% (1)
- Field Programmable Gate Array Implementation of 14 Bit Sigma-Delta Analog To Digital ConverterDocument4 pagesField Programmable Gate Array Implementation of 14 Bit Sigma-Delta Analog To Digital ConverterInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Week 2Document34 pagesWeek 2İBRAHİM YÜMLÜNo ratings yet
- DSP Lecture 1Document28 pagesDSP Lecture 1Mohammad Rahat Hossen KhanNo ratings yet
- Digital Signal ProcessingDocument6 pagesDigital Signal ProcessingNemanja StevanovićNo ratings yet
- TermsDocument1 pageTermsCharity CajigasNo ratings yet
- Digital Signal Processing NotesDocument12 pagesDigital Signal Processing NotesDanial ZamanNo ratings yet
- C. Instrumentation For Electrical Bioimpedance MeasurementsDocument32 pagesC. Instrumentation For Electrical Bioimpedance MeasurementsDmitriyNo ratings yet
- EE341 Chapter 1Document76 pagesEE341 Chapter 1Quốc HiếuNo ratings yet
- Chapter1 StudentDocument76 pagesChapter1 StudentDũng GoonerNo ratings yet
- Course EEE 431: Communication PrinciplesDocument44 pagesCourse EEE 431: Communication Principlesabdul.azeezNo ratings yet
- 02 DataTransmission TVMDocument44 pages02 DataTransmission TVMTrinnette07No ratings yet
- Test 1 - 480 (2019) SolutionsDocument5 pagesTest 1 - 480 (2019) SolutionsSamson MumbaNo ratings yet
- IP Encapsulation, Fragmentation, and Reassembly REVISEDDocument25 pagesIP Encapsulation, Fragmentation, and Reassembly REVISEDSamson MumbaNo ratings yet
- Robotics AI& ML Sample QuestionsDocument11 pagesRobotics AI& ML Sample QuestionsSamson MumbaNo ratings yet
- Introduction To Introduction To Normalisation Normalisation Introduction To Introduction To Normalisation NormalisationDocument7 pagesIntroduction To Introduction To Normalisation Normalisation Introduction To Introduction To Normalisation NormalisationSamson MumbaNo ratings yet
- Introduction To Introduction To Databases Databases Introduction To Introduction To Databases DatabasesDocument5 pagesIntroduction To Introduction To Databases Databases Introduction To Introduction To Databases DatabasesSamson MumbaNo ratings yet
- Distributed DBMS ConceptsDocument6 pagesDistributed DBMS ConceptsSamson MumbaNo ratings yet
- Language and The BrainDocument7 pagesLanguage and The Brainapi-3716467No ratings yet
- Jehangir Ratanji Dadabhoy (JRD) Tata, Faquir Chand (F C) KohliDocument7 pagesJehangir Ratanji Dadabhoy (JRD) Tata, Faquir Chand (F C) KohliljhkjgufuNo ratings yet
- Lg-monoblock-TERMAV-instalation ManualDocument263 pagesLg-monoblock-TERMAV-instalation ManualJernej SevšekNo ratings yet
- Çalışma Soruları - 1Document6 pagesÇalışma Soruları - 1emreasker22No ratings yet
- CND 017 07 071007Document7 pagesCND 017 07 071007liufei3190No ratings yet
- MH716 Thermal System Design SyllabusDocument2 pagesMH716 Thermal System Design SyllabusUjjaval AminNo ratings yet
- Research FinalDocument12 pagesResearch FinalTaturam Armee100% (1)
- Solution Manual For Modern Management Concepts and Skills 12 e 12th Edition 0132622610Document13 pagesSolution Manual For Modern Management Concepts and Skills 12 e 12th Edition 0132622610PhilipWoodpsen100% (42)
- Data Encoding & TransmissionDocument37 pagesData Encoding & Transmissionheaven letaNo ratings yet
- Research and TheoryDocument6 pagesResearch and TheoryWahengbam Rorrkychand100% (1)
- HRD and Organizational ChangeDocument10 pagesHRD and Organizational ChangeYaso TharNo ratings yet
- 2017 LT4 Wiring DiagramDocument10 pages2017 LT4 Wiring DiagramThomasNo ratings yet
- Stone Tool of The Near EastDocument427 pagesStone Tool of The Near EastJa Asi0% (1)
- Presented By: Group 3: Cacayan, Grace L. Canlas, Rinalyn O. Celestial, Artchie EDocument9 pagesPresented By: Group 3: Cacayan, Grace L. Canlas, Rinalyn O. Celestial, Artchie EPatrick MakalintalNo ratings yet
- Essay 1 Draft 2Document5 pagesEssay 1 Draft 2api-582010496No ratings yet
- 95 - A53 Z1 9 0020 B en - Technical DocumentationDocument184 pages95 - A53 Z1 9 0020 B en - Technical DocumentationSyed Mohammad NaveedNo ratings yet
- Focus 4 Unit 2 PersonalityDocument2 pagesFocus 4 Unit 2 Personalityk.nowakNo ratings yet
- Edmo Dma200Document2 pagesEdmo Dma200anasamierNo ratings yet
- Size Effect of Concrete Members Applied With Exural Compressive StressesDocument25 pagesSize Effect of Concrete Members Applied With Exural Compressive StressesJohn WoodNo ratings yet
- Lab 1Document6 pagesLab 1Israa GhzawiNo ratings yet
- Soyinka Every Dictator's Nightmare EssayDocument4 pagesSoyinka Every Dictator's Nightmare EssayagainstabsurdityNo ratings yet
- C1812 Display Logger DatasheetDocument4 pagesC1812 Display Logger DatasheetselnemaisNo ratings yet
- CLC Lecture 2Document37 pagesCLC Lecture 2Emre-Mihai YapiciNo ratings yet
- Valve Adjustment For 16 Valve Suzuki GS MotorsDocument9 pagesValve Adjustment For 16 Valve Suzuki GS Motorsmiki-likiNo ratings yet
- Ryan-James Papworth: Address: 69 Thetford Road Brandon IP27 0BZ Mobile: 07825705487 Personal StatmentDocument10 pagesRyan-James Papworth: Address: 69 Thetford Road Brandon IP27 0BZ Mobile: 07825705487 Personal Statmentryan482No ratings yet
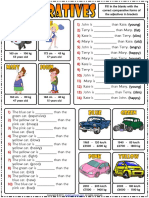
- Comparative Forms of Adjectives Esl Grammar Gap Fill Exercises Worksheet PDFDocument2 pagesComparative Forms of Adjectives Esl Grammar Gap Fill Exercises Worksheet PDFCris Cr100% (1)