Download as pdf or txt
You might also like
- EME 109 Lab: Temperature Measurements and Dynamic ResponseDocument13 pagesEME 109 Lab: Temperature Measurements and Dynamic ResponseJesse Barnett100% (1)
- CH 4 Electrical Design of CIGRE Green Book - Overhead Lines PDFDocument144 pagesCH 4 Electrical Design of CIGRE Green Book - Overhead Lines PDFeeng8124No ratings yet
- Uniform Circular Motion: Physics Lab Report Presented byDocument15 pagesUniform Circular Motion: Physics Lab Report Presented byapi-442005899No ratings yet
- Work and Kinetic EnergyDocument9 pagesWork and Kinetic EnergyChan LieslNo ratings yet
- Work and Energy: Dynasty D. Chen November 24, 2021Document16 pagesWork and Energy: Dynasty D. Chen November 24, 2021nonononoNo ratings yet
- Proving Lagrange EquationDocument5 pagesProving Lagrange Equationأحمد علي الفاخريNo ratings yet
- Work, Energy & Power: AP Physics CDocument53 pagesWork, Energy & Power: AP Physics Csamocamo 123No ratings yet
- Lec.2 Work and Kinetic TheromDocument28 pagesLec.2 Work and Kinetic Theromsosoayman484No ratings yet
- Physics AS Unit 1 04 Energy and PowerDocument9 pagesPhysics AS Unit 1 04 Energy and PowerAli SalamehNo ratings yet
- Pe and Energy ConservationDocument11 pagesPe and Energy ConservationChan LieslNo ratings yet
- WorkDocument5 pagesWorkUmer KhalidNo ratings yet
- Gr.12 Work Energy Power SummaryDocument1 pageGr.12 Work Energy Power SummarySaraNo ratings yet
- 6 Work and EnergyDocument7 pages6 Work and EnergyHassan FulaihNo ratings yet
- Physics 1 - LESSON 6 (Mid - Fall 24)Document18 pagesPhysics 1 - LESSON 6 (Mid - Fall 24)kazi jubayerNo ratings yet
- Physics 1 - LESSON 6 (Mid - Spring 24)Document18 pagesPhysics 1 - LESSON 6 (Mid - Spring 24)faisalfahim228No ratings yet
- Relador Synthesis (PS)Document2 pagesRelador Synthesis (PS)John Edison BrilloNo ratings yet
- Work Energy and PowerDocument42 pagesWork Energy and PowerKryschan CaditeNo ratings yet
- Class-11 Physics Assignment No 30 UNIT-4: Work, Energy and PowerDocument3 pagesClass-11 Physics Assignment No 30 UNIT-4: Work, Energy and Powervictoria schoolNo ratings yet
- Session 3 Kinetics of Particles Work Energy PrincipleDocument34 pagesSession 3 Kinetics of Particles Work Energy PrincipleRosina AdhikariNo ratings yet
- Kinetic Energy and WorkDocument7 pagesKinetic Energy and Workmikel artetaNo ratings yet
- CH 2 NotesDocument33 pagesCH 2 NotesBhavik NerkarNo ratings yet
- Work Energy-5Document4 pagesWork Energy-5Zahida ParnisNo ratings yet
- Chapter 05 Aspire Physics-Xi (30!9!203)Document16 pagesChapter 05 Aspire Physics-Xi (30!9!203)kuldeeplohana89No ratings yet
- Physics 1 - LESSON 6 (Mid - Spring 24)Document18 pagesPhysics 1 - LESSON 6 (Mid - Spring 24)Md Muntassir Mahmud Khan ShakibNo ratings yet
- 5.work Energy and PowerDocument48 pages5.work Energy and Powermonsterrider135No ratings yet
- CODE CORTEZ Physics Notes 2nd QTRDocument4 pagesCODE CORTEZ Physics Notes 2nd QTRjamesdlcrz07No ratings yet
- 2.18 Work and Energy With Varying Forces, Power-1 PDFDocument21 pages2.18 Work and Energy With Varying Forces, Power-1 PDFJoanna Angela LeeNo ratings yet
- Kinetics - Work and Energy MethodDocument44 pagesKinetics - Work and Energy MethodmusfiqurrahmananyNo ratings yet
- CH-6 Work, Energy and PowerDocument31 pagesCH-6 Work, Energy and PowerSurendra singhNo ratings yet
- Lesson 5a - Work and Energy Part 1Document34 pagesLesson 5a - Work and Energy Part 1kryzzia angelaNo ratings yet
- Physgen Unit 5Document13 pagesPhysgen Unit 5emji miraNo ratings yet
- 12A.4 Energy NSDocument2 pages12A.4 Energy NSnishka.sheikNo ratings yet
- Work-and-Energy 1 1Document27 pagesWork-and-Energy 1 1edmarvanzuela143No ratings yet
- LM6 Work Energy and Energy Conservation GPHYS1Document116 pagesLM6 Work Energy and Energy Conservation GPHYS1Marjorie KhylNo ratings yet
- Week 5 Kinetics of ParticlesDocument24 pagesWeek 5 Kinetics of Particles陳台No ratings yet
- PHY 102 - Work and EnergyDocument49 pagesPHY 102 - Work and EnergySamuel BanwoNo ratings yet
- Chapter 6 - Work, Power and Energy - BookletDocument6 pagesChapter 6 - Work, Power and Energy - BookletHanif Hassan BarbhuiyaNo ratings yet
- Force and Motion - Energy, Work and Power PDFDocument7 pagesForce and Motion - Energy, Work and Power PDFAnonymous ee5dOjNo ratings yet
- 1st Puc Physics Chapter8-Gravitation Notes by U N SwamyDocument11 pages1st Puc Physics Chapter8-Gravitation Notes by U N Swamyashwinikumari bNo ratings yet
- SLM Gen. Physics 1 6th WKDocument16 pagesSLM Gen. Physics 1 6th WKrrNo ratings yet
- Work, Energy and PowerDocument17 pagesWork, Energy and PowersmollilnubNo ratings yet
- Work and Kinetic EnergyDocument3 pagesWork and Kinetic EnergyDEEPAK TNo ratings yet
- 1st Puc Physics Chapter6-Work Power and Energy Notes by U N SwamyDocument21 pages1st Puc Physics Chapter6-Work Power and Energy Notes by U N Swamyashwinikumari bNo ratings yet
- General Physics 1 (W5)Document5 pagesGeneral Physics 1 (W5)Kim SeungminNo ratings yet
- Work Power EnergyDocument8 pagesWork Power EnergyAbanti.DNo ratings yet
- ES 11 Formula Sheet v1Document3 pagesES 11 Formula Sheet v1Sam RuelosNo ratings yet
- DynamicsDocument30 pagesDynamicsCalie BearNo ratings yet
- Chapter 5Document31 pagesChapter 5Taleb AbboudNo ratings yet
- Gravitation 2Document31 pagesGravitation 2Reanna DhorayNo ratings yet
- PHYS172 Lect07 Sp22Document39 pagesPHYS172 Lect07 Sp22emmakcaldwell18No ratings yet
- Grade 11 Physics Notes Unit 5-8Document85 pagesGrade 11 Physics Notes Unit 5-8hiwot kebedeNo ratings yet
- Topic 2 Mechanics PDFDocument7 pagesTopic 2 Mechanics PDFGonzalo PastorNo ratings yet
- PhysicsDocument14 pagesPhysicsciaaa.maeeeNo ratings yet
- Physics Unit 3: Work Energy and MomentumDocument83 pagesPhysics Unit 3: Work Energy and MomentumJane JNo ratings yet
- Physics A LevelDocument38 pagesPhysics A LevelThoon Nadi NaiNo ratings yet
- L2 - Satellite Orbital Motion - P2Document20 pagesL2 - Satellite Orbital Motion - P2Anil SubediNo ratings yet
- Work, Energy and Power (Part 3)Document13 pagesWork, Energy and Power (Part 3)Sandesh TimalsinaNo ratings yet
- Lecture 1,2 - CMDocument17 pagesLecture 1,2 - CMRuru ThakurNo ratings yet
- Feynman Lectures Simplified 2D: Magnetic Matter, Elasticity, Fluids, & Curved SpacetimeFrom EverandFeynman Lectures Simplified 2D: Magnetic Matter, Elasticity, Fluids, & Curved SpacetimeNo ratings yet
- Potential Energy vs. Kinetic Energy - Physics Made Simple - 4th Grade | Children's Physics BooksFrom EverandPotential Energy vs. Kinetic Energy - Physics Made Simple - 4th Grade | Children's Physics BooksNo ratings yet
- Let's Calculate Work! Physics And The Work Formula : Physics for Kids - 5th Grade | Children's Physics BooksFrom EverandLet's Calculate Work! Physics And The Work Formula : Physics for Kids - 5th Grade | Children's Physics BooksNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- L5 ReviewerDocument2 pagesL5 ReviewerJustin JaranillaNo ratings yet
- BIO1 - Study Guide 4.3 - Cell Transport Mechanism II - Active and Facilitated TransportDocument13 pagesBIO1 - Study Guide 4.3 - Cell Transport Mechanism II - Active and Facilitated TransportJustin JaranillaNo ratings yet
- Entrep ReviewerDocument7 pagesEntrep ReviewerJustin JaranillaNo ratings yet
- BIO1 - Study Guide 4.4 - Cell Transport Mechanism II - Bulk or Vesicular TransportDocument13 pagesBIO1 - Study Guide 4.4 - Cell Transport Mechanism II - Bulk or Vesicular TransportJustin JaranillaNo ratings yet
- BIO1 - Study Guide 4.5 - Exocytosis and EndocytosisDocument16 pagesBIO1 - Study Guide 4.5 - Exocytosis and EndocytosisJustin JaranillaNo ratings yet
- BIO1 - Study Guide 4.2 - Cell Transport Mechanism I - Diffussion and OsmosisDocument15 pagesBIO1 - Study Guide 4.2 - Cell Transport Mechanism I - Diffussion and OsmosisJustin JaranillaNo ratings yet
- Gen Bio ReviewerDocument3 pagesGen Bio ReviewerJustin JaranillaNo ratings yet
- Philosophy Reviewer-1Document3 pagesPhilosophy Reviewer-1Justin JaranillaNo ratings yet
- Research ReviewerDocument3 pagesResearch ReviewerJustin JaranillaNo ratings yet
- Mil - ReviewerDocument2 pagesMil - ReviewerJustin JaranillaNo ratings yet
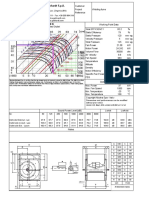
- CFM at 120 MMWCDocument1 pageCFM at 120 MMWCSupport aeronomNo ratings yet
- FE/EIT Dynamics Sample ProblemsDocument37 pagesFE/EIT Dynamics Sample Problemscasper911ca100% (1)
- Calculation of Brine PropertiesDocument26 pagesCalculation of Brine PropertiesacfernandezNo ratings yet
- MQ OMjia 19 Zo 0634 QTMPGDocument28 pagesMQ OMjia 19 Zo 0634 QTMPGROYAL JAATNo ratings yet
- Chtest8 SolutionDocument9 pagesChtest8 SolutionMaulitaNo ratings yet
- 03-05-20 SR - Iit N-Super Chaina N-Chaina Jee-Adv 2017 p1 Gta-13 P-I Key SolDocument10 pages03-05-20 SR - Iit N-Super Chaina N-Chaina Jee-Adv 2017 p1 Gta-13 P-I Key SolSubrata KarmakarNo ratings yet
- Lab Report 2Document3 pagesLab Report 2ChristianNo ratings yet
- Gravitation: Very Short Answer Type Questions-Pg-100Document53 pagesGravitation: Very Short Answer Type Questions-Pg-100DX GamingNo ratings yet
- Lab No 11Document6 pagesLab No 11Zain AbdullahNo ratings yet
- Fluids Full Final CourseDocument474 pagesFluids Full Final CourseNoor Ul Amin AwanNo ratings yet
- Newton's 1 Law Lab ActivitiesDocument10 pagesNewton's 1 Law Lab ActivitiesNghi NguyenNo ratings yet
- 4 Work Energy and PowerDocument15 pages4 Work Energy and PowerReyzel Anne FaylognaNo ratings yet
- A0materials Science and EngineeringDocument58 pagesA0materials Science and EngineeringalfajNo ratings yet
- Radhealth Handbook 1970Document475 pagesRadhealth Handbook 1970Joaquin AlvarezNo ratings yet
- Physics: Summer Vacation HomeworkDocument34 pagesPhysics: Summer Vacation HomeworkTedNo ratings yet
- Lecture 1 & 2Document18 pagesLecture 1 & 2Shabih HaiderNo ratings yet
- Calculations Used in Analytical Chemistry: Savitribai Phule Pune UniversityDocument21 pagesCalculations Used in Analytical Chemistry: Savitribai Phule Pune UniversityZari Sofia LevisteNo ratings yet
- Lecture 3Document43 pagesLecture 3Farhan Mukhtiar YousafzaiNo ratings yet
- BE - MECH - Heating Ventilation & Air Conditioning - Dec 2019Document5 pagesBE - MECH - Heating Ventilation & Air Conditioning - Dec 2019Vishal GaikwadNo ratings yet
- Chapter 1Document10 pagesChapter 1آڃمْڊ آلُنْمْرNo ratings yet
- Sep115b Test 1 (2023) MemoDocument13 pagesSep115b Test 1 (2023) MemoCharity ChazNo ratings yet
- PhysicsDocument19 pagesPhysicsbhagyashree062005No ratings yet
- King Fahd University of Petroleum & Minerals: Mechanical Engineering Dynamics ME 201 BY Dr. Meyassar N. Al-HaddadDocument29 pagesKing Fahd University of Petroleum & Minerals: Mechanical Engineering Dynamics ME 201 BY Dr. Meyassar N. Al-HaddadTommyVercettiNo ratings yet
- MLAB UnitsDocument1 pageMLAB UnitsSushaine TanNo ratings yet
- LS48V100Ah Module SpecificationDocument16 pagesLS48V100Ah Module SpecificationhermantoNo ratings yet
- Air Duct CalculatorDocument1 pageAir Duct Calculatormanikantan100% (2)
- Practicals Physical ChemistryDocument19 pagesPracticals Physical ChemistryMuhammad Asif83% (35)