Download as docx, pdf, or txt
You might also like
- Building Mobile Apps at Scale: 39 Engineering ChallengesFrom EverandBuilding Mobile Apps at Scale: 39 Engineering ChallengesRating: 5 out of 5 stars5/5 (2)
- Introduction To Mentor Robotic ArmDocument2 pagesIntroduction To Mentor Robotic ArmSAMIE KHANNo ratings yet
- Programmable All Direction Robot With Arm: ComponentsDocument2 pagesProgrammable All Direction Robot With Arm: ComponentsTùng HồNo ratings yet
- MULTIPURPOSE ROBO OprationDocument7 pagesMULTIPURPOSE ROBO OprationDinesh DineshNo ratings yet
- Pick and Place Robotic Arm Using Android DeviceDocument2 pagesPick and Place Robotic Arm Using Android DeviceOJ AlazzawiNo ratings yet
- 123456Document11 pages123456Abhishek ChettyNo ratings yet
- Mini Project Abstracts - EmbeddedDocument24 pagesMini Project Abstracts - EmbeddedS Manivannan 16BIT0437No ratings yet
- Android Controlled Wildlife Observation RobotDocument83 pagesAndroid Controlled Wildlife Observation RobotdileeppatraNo ratings yet
- AbhishekDocument13 pagesAbhishekAbhishek ChettyNo ratings yet
- XXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64Document12 pagesXXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64HRITHIK POOJARYNo ratings yet
- Gerture Controlled RobotDocument8 pagesGerture Controlled RobotresearchparksNo ratings yet
- A Study On Gesture Control Ardiuno RobotDocument8 pagesA Study On Gesture Control Ardiuno RobotElakkiya DasanNo ratings yet
- JustificationDocument2 pagesJustificationMarcialNo ratings yet
- Materials, Parts, Tools or Specialized Devices Through Variable Programmed Motions For The Performance of A Variety of Tasks"Document38 pagesMaterials, Parts, Tools or Specialized Devices Through Variable Programmed Motions For The Performance of A Variety of Tasks"kamalahasanmNo ratings yet
- Smartphone Controlled Programmable Robotic Arm ArduinoDocument3 pagesSmartphone Controlled Programmable Robotic Arm ArduinoK S RANJITH ランジットNo ratings yet
- Design and Development of An Embedded System For Robotic Arm Movement Control Using Voice Recognition and Zigbee Communication TechnologiesDocument2 pagesDesign and Development of An Embedded System For Robotic Arm Movement Control Using Voice Recognition and Zigbee Communication TechnologiesKumar Goud.KNo ratings yet
- Robotic Car Using Arduino With Bluetooth PDFDocument4 pagesRobotic Car Using Arduino With Bluetooth PDFSummer KoNo ratings yet
- IJCRT2207368Document7 pagesIJCRT2207368Ernest ChiwaleNo ratings yet
- Robotic Car Using Arduino With Bluetooth ControllerDocument8 pagesRobotic Car Using Arduino With Bluetooth ControllerSikhiva Publishing HouseNo ratings yet
- Robot Movement Control by Using AndriodDocument62 pagesRobot Movement Control by Using AndriodLikhitha NinarapuNo ratings yet
- Presentation Pick and Place Robo Arm 3d PrintedDocument16 pagesPresentation Pick and Place Robo Arm 3d PrintedKshitij BandarNo ratings yet
- Machines That Can SeeDocument7 pagesMachines That Can SeeMihiretuNo ratings yet
- B.E Mech Batchno 107Document57 pagesB.E Mech Batchno 107saravana murthyNo ratings yet
- 18BME025 - ME404 AssgnDocument13 pages18BME025 - ME404 AssgndevashNo ratings yet
- Articulo Programacion ....Document7 pagesArticulo Programacion ....GermanGutierrezNo ratings yet
- Voice Control Robot PaperDocument4 pagesVoice Control Robot PaperAkshay bypNo ratings yet
- Synopsis Robot Phone SystemDocument12 pagesSynopsis Robot Phone SystemPuran Singh ChannaNo ratings yet
- Smart Driving System ControlledDocument1 pageSmart Driving System Controlledbalaji saiNo ratings yet
- Pick and Place Robotic Arm Implementation Using ArduinoDocument9 pagesPick and Place Robotic Arm Implementation Using Arduinodhinesh dinsNo ratings yet
- Arduino Based Voice Controlled Robot Vehicle: IOP Conference Series: Materials Science and EngineeringDocument8 pagesArduino Based Voice Controlled Robot Vehicle: IOP Conference Series: Materials Science and EngineeringAbhishekNo ratings yet
- Paper On Android Controlled Arduino Based Robot CAR: Namita Shinde, Shreya Srivastava, Vineet Sharma, Samarth KumarDocument3 pagesPaper On Android Controlled Arduino Based Robot CAR: Namita Shinde, Shreya Srivastava, Vineet Sharma, Samarth KumarFakhr Al-TimimiNo ratings yet
- Project Synopsis On Gesture Control Robotic VehileDocument5 pagesProject Synopsis On Gesture Control Robotic Vehilevenugopal mallaNo ratings yet
- Elecbits - Gesture Control Robotic Vehile - SynopsisDocument5 pagesElecbits - Gesture Control Robotic Vehile - Synopsisvenugopal mallaNo ratings yet
- Elecbits - Gesture Control Robotic Vehile - SynopsisDocument5 pagesElecbits - Gesture Control Robotic Vehile - SynopsisRohitNo ratings yet
- Project Synopsis On Gesture Control Robotic VehileDocument5 pagesProject Synopsis On Gesture Control Robotic Vehilevenugopal mallaNo ratings yet
- Bluetooth Car Using ArduinoDocument13 pagesBluetooth Car Using ArduinoRainy Thakur100% (1)
- MSI CEP Lab Project Report Final Version Report...Document23 pagesMSI CEP Lab Project Report Final Version Report...ghazi abbasNo ratings yet
- Hand Gesture Controlled RobotDocument59 pagesHand Gesture Controlled RobotNext Gen DigitalNo ratings yet
- All ProjectsDocument36 pagesAll ProjectsAsmaa AmerNo ratings yet
- Group 6 (Arduino Based Voice Controlled Robot Vehicle)Document14 pagesGroup 6 (Arduino Based Voice Controlled Robot Vehicle)rohit100% (1)
- Gesture Controlled Car From Android: II. Technical RequirementsDocument3 pagesGesture Controlled Car From Android: II. Technical RequirementsManthan SinghNo ratings yet
- Gesture Controlled Robot-SynopsisDocument12 pagesGesture Controlled Robot-SynopsisRohitNo ratings yet
- SMART CarDocument9 pagesSMART Cartaha azadNo ratings yet
- Open Ended Assignment (A&R)Document13 pagesOpen Ended Assignment (A&R)Farrukh FarrukhNo ratings yet
- Obstacle Avoidance RobotDocument18 pagesObstacle Avoidance RobotAlimi UthmanNo ratings yet
- F L8 TA 202 NC Part ProgrammingDocument4 pagesF L8 TA 202 NC Part ProgrammingAqsa Khanam0% (1)
- Pick and Place Robot Report New Edited2Document19 pagesPick and Place Robot Report New Edited2Kshitij BandarNo ratings yet
- Smart Floor Cleanng RobotDocument77 pagesSmart Floor Cleanng RobotGagneet KaurNo ratings yet
- Fundamentals of Industrial Robotics - Session 3 - ToolsDocument39 pagesFundamentals of Industrial Robotics - Session 3 - ToolsAnonymous m9rvPnc100% (1)
- Final Year Cpvasssssssssssp PROJECTDocument46 pagesFinal Year Cpvasssssssssssp PROJECTDhiraj Chaudhari 137 CoNo ratings yet
- RobotWare 6 DatasheetDocument4 pagesRobotWare 6 DatasheetXanti Zabala Da RosaNo ratings yet
- Raspberry Pi Based Dual-ARM Tele Robotic System With Live Video StreamingDocument5 pagesRaspberry Pi Based Dual-ARM Tele Robotic System With Live Video StreamingYusmi MaulanaNo ratings yet
- Android Based Robot Using BluetoothDocument3 pagesAndroid Based Robot Using BluetoothFinal Year Projects 2014No ratings yet
- Chapter 5Document2 pagesChapter 5Aung ThikeNo ratings yet
- Shri Shankaracharya Technical Capmus: Submitted By: - Project GuideDocument5 pagesShri Shankaracharya Technical Capmus: Submitted By: - Project GuideAnonymous QlB67eFXDLNo ratings yet
- A On "Capsten Project Planning (CPP) - 22058" Topic - Voice Control Robot CarDocument18 pagesA On "Capsten Project Planning (CPP) - 22058" Topic - Voice Control Robot CarViresh bhoirNo ratings yet
- Android Controlled Bluetooth RobotDocument15 pagesAndroid Controlled Bluetooth RobotSuyash BansalNo ratings yet
- Mobile Controlled Robotic Arm Using Arduino & Hc-05Document16 pagesMobile Controlled Robotic Arm Using Arduino & Hc-05anugya sharmaNo ratings yet
- Unit 5Document21 pagesUnit 5Sarika MadugulaNo ratings yet
- Project ProposalDocument3 pagesProject ProposalAhsan TariqNo ratings yet
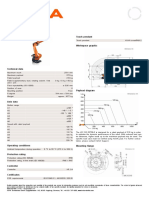
- KR 210 R2700-2 TDSDocument1 pageKR 210 R2700-2 TDSHarbhajan SinghNo ratings yet
- Humanoid RobotsDocument28 pagesHumanoid Robotsneethu_20No ratings yet
- Daftar Harga Sewa ExcavatorDocument1 pageDaftar Harga Sewa ExcavatorTiara KumalaNo ratings yet
- Ey Robotic Process AutomationDocument6 pagesEy Robotic Process AutomationBalaramNo ratings yet
- Robotics (Word)Document7 pagesRobotics (Word)MacoyNo ratings yet
- EE16704 UNIT5 RoboticsDocument60 pagesEE16704 UNIT5 RoboticsthamizmaniNo ratings yet
- Specification of RobotsDocument7 pagesSpecification of RobotsBilal MalikNo ratings yet
- Karyashala RobotDocument3 pagesKaryashala RobotJyoti Raj MahantaNo ratings yet
- What Is A RobotDocument4 pagesWhat Is A Robotmardochée tchobwéNo ratings yet
- Build Autonomous Mobile Robot From Scratch Using Ros Simulation and Hardware Rajesh Subramanian Full ChapterDocument67 pagesBuild Autonomous Mobile Robot From Scratch Using Ros Simulation and Hardware Rajesh Subramanian Full Chapterbill.owens447100% (6)
- Escape The HypertrenchDocument7 pagesEscape The HypertrenchCalebNo ratings yet
- Hfttffxhgtygfdryggv 4:ffdfDocument1 pageHfttffxhgtygfdryggv 4:ffdfАйбек РустамNo ratings yet
- MTD Review Desember - PAMTDocument7 pagesMTD Review Desember - PAMTAji AmandodwizariNo ratings yet
- Robotex - Line - Following - Rules - ENG (Ejemplo 1)Document7 pagesRobotex - Line - Following - Rules - ENG (Ejemplo 1)ivanNo ratings yet
- Roomba Vacuum CleanerDocument2 pagesRoomba Vacuum CleanerAlex DA CostaNo ratings yet
- 7 Advantages of Robots in The WorkplaceDocument2 pages7 Advantages of Robots in The WorkplaceAbegail MasaydaNo ratings yet
- Rule Book PDFDocument12 pagesRule Book PDFMuhammad ShayanNo ratings yet
- ESME Tadele B. Tuli and Tesfaye O. TerefeDocument9 pagesESME Tadele B. Tuli and Tesfaye O. TerefeTesfayeNo ratings yet
- Introduction To Robotics, Class Notes (UG Level) : June 2015Document19 pagesIntroduction To Robotics, Class Notes (UG Level) : June 2015Gayathri R HICET CSE STAFFNo ratings yet
- Case Study On Robot: "KURI"Document23 pagesCase Study On Robot: "KURI"Rohan BairagiNo ratings yet
- 2019 1Document6 pages2019 1Ekaterine ChachibaiaNo ratings yet
- Product Sheet HandE Adaptive Gripper ENDocument2 pagesProduct Sheet HandE Adaptive Gripper ENunboxindustry22No ratings yet
- Abb Riyadh FactoryDocument1 pageAbb Riyadh FactoryAbu Ammar YasirNo ratings yet
- Ict NotesDocument3 pagesIct NotesCara Isabelle VaronaNo ratings yet
- Comparación de La Enseñanza Dos Sistemas de Programación Robótica Enfocada A LosDocument25 pagesComparación de La Enseñanza Dos Sistemas de Programación Robótica Enfocada A LosBodoquito BonitoNo ratings yet
- University of Creative Technology, Chittagong: Future of Industrial Robots' in BangladeshDocument14 pagesUniversity of Creative Technology, Chittagong: Future of Industrial Robots' in BangladeshwagoheNo ratings yet
- Lightweight & Cost-Effective Robotic Arms: by UfactoryDocument11 pagesLightweight & Cost-Effective Robotic Arms: by UfactoryBayuNo ratings yet
- FST Essential November2021 ENDocument39 pagesFST Essential November2021 ENSaravanan K.No ratings yet
- Concept Paper in RoboticsDocument4 pagesConcept Paper in Roboticsjommel vargasNo ratings yet
- (thi247.com) - Đề khảo sát chất lượng đầu năm 2018 - 2019 Tiếng Anh 12 trường Thuận Thành 1 - Bắc Ninh PDFDocument6 pages(thi247.com) - Đề khảo sát chất lượng đầu năm 2018 - 2019 Tiếng Anh 12 trường Thuận Thành 1 - Bắc Ninh PDFThai Thi Hong LoanNo ratings yet