Download as pdf or txt
You might also like
- Wipro Technologies Sal Slip AprDocument1 pageWipro Technologies Sal Slip Aprssvishal50% (10)
- 1 Final Module On Perpetual CalendarDocument15 pages1 Final Module On Perpetual Calendarmilan chaturvedi100% (2)
- (Molecular Biology Biochemistry and Biophysics 31) S. I. Chan, D. F. Bocian, N. O. Petersen (Auth.), Dr. Ernst Grell (Eds.) - Membrane Spectroscopy-Springer Berlin Heidelberg (1981)Document508 pages(Molecular Biology Biochemistry and Biophysics 31) S. I. Chan, D. F. Bocian, N. O. Petersen (Auth.), Dr. Ernst Grell (Eds.) - Membrane Spectroscopy-Springer Berlin Heidelberg (1981)Gabriela MarzariNo ratings yet
- Perdukova PDFDocument6 pagesPerdukova PDFleonardo_melo_costaNo ratings yet
- FCT Brochure enDocument4 pagesFCT Brochure enerNo ratings yet
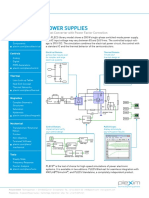
- Power Supplies: Boost Converter With Power Factor CorrectionDocument2 pagesPower Supplies: Boost Converter With Power Factor CorrectionhvworldcupNo ratings yet
- 2021 Methodology For The Improvements in Synchrophasor Based System Integrity Protection Schemes Under Stressed ConditioDocument19 pages2021 Methodology For The Improvements in Synchrophasor Based System Integrity Protection Schemes Under Stressed ConditioBryan AmbrósioNo ratings yet
- Power Electronics FYP Poster A3 PaperDocument1 pagePower Electronics FYP Poster A3 Paperyarsidk28No ratings yet
- Setting Relay JarakDocument5 pagesSetting Relay JarakFelix PalanganNo ratings yet
- Datasheet - SMART GRID TECHNOLOGIES - 220V - 50Hz PDFDocument40 pagesDatasheet - SMART GRID TECHNOLOGIES - 220V - 50Hz PDFJoJo GoodzNo ratings yet
- Design Criteria: 1. OverviewDocument3 pagesDesign Criteria: 1. OverviewVinay PallivalppilNo ratings yet
- An m-EVBT Algorithm For Energy Efficient Routing in Wireless Sensor NetworksDocument6 pagesAn m-EVBT Algorithm For Energy Efficient Routing in Wireless Sensor Networksأبو أيوب تافيلالتNo ratings yet
- Reinforcement-Learning-Based Damping Control SchemDocument14 pagesReinforcement-Learning-Based Damping Control SchemjamesNo ratings yet
- Nexus User-Oriented Integrated Solutions-En Brochure 180308 V4Document32 pagesNexus User-Oriented Integrated Solutions-En Brochure 180308 V4Andrian ArifinNo ratings yet
- Training Simulation Models and Architectures in PoDocument7 pagesTraining Simulation Models and Architectures in PoTayi hamidNo ratings yet
- Optimized Multiple Microgrid-Based Clustering of Active Distribution Systems Considering Communication and Control RequirementsDocument13 pagesOptimized Multiple Microgrid-Based Clustering of Active Distribution Systems Considering Communication and Control RequirementsArjun ChatterjeeNo ratings yet
- Paper Modular Neural NetworkDocument11 pagesPaper Modular Neural NetworkQunalNo ratings yet
- 2021, Elsevier, Journal BE, Atefeh Hossein and Et Al, Efficient Photodetector Placement For Daylight-ResponsiveDocument12 pages2021, Elsevier, Journal BE, Atefeh Hossein and Et Al, Efficient Photodetector Placement For Daylight-Responsiveali.karimian2022paeNo ratings yet
- 004 Distributed Intelligent System For Self-Healing in Smart GridsDocument10 pages004 Distributed Intelligent System For Self-Healing in Smart GridsCleberton ReizNo ratings yet
- Disocont Tersus bvd2398gb PDFDocument4 pagesDisocont Tersus bvd2398gb PDFSuandi AnasNo ratings yet
- Disocont Tersus bvd2398gb PDFDocument4 pagesDisocont Tersus bvd2398gb PDFSuandi AnasNo ratings yet
- IET Power Electronics - 2021 - Saadat - Adaptive Neuro Fuzzy Inference Systems ANFIS Controller Design On Single PhaseDocument14 pagesIET Power Electronics - 2021 - Saadat - Adaptive Neuro Fuzzy Inference Systems ANFIS Controller Design On Single PhaseMahdi HERMASSINo ratings yet
- Test Distribution Systems: Network Parameters and Diagrams of Electrical StructuralDocument10 pagesTest Distribution Systems: Network Parameters and Diagrams of Electrical StructuralJavier Madrigal OviedoNo ratings yet
- Hawassa University, Embedded Systems Lecture 1Document18 pagesHawassa University, Embedded Systems Lecture 1JohnNo ratings yet
- Embedded Systems Lecture 1Document18 pagesEmbedded Systems Lecture 1Etefa BelachewNo ratings yet
- Modeling Simulation and Control of Large Scale CryDocument6 pagesModeling Simulation and Control of Large Scale CryPhilippe GayetNo ratings yet
- J37.WSEAS Power Systems 2023Document14 pagesJ37.WSEAS Power Systems 2023George FotisNo ratings yet
- BVD 2398 GBDocument4 pagesBVD 2398 GBSteveNo ratings yet
- 532 540 PB PDFDocument7 pages532 540 PB PDFvijaya kakaniNo ratings yet
- Nuclear Engineering and Technology: Moon-Gi Min, Jae-Ki Lee, Kwang-Hyun Lee, Dongil Lee, Hee-Taek LimDocument7 pagesNuclear Engineering and Technology: Moon-Gi Min, Jae-Ki Lee, Kwang-Hyun Lee, Dongil Lee, Hee-Taek LimfreewareNo ratings yet
- Study On Column Wise Design Compaction For Reconfigurable SystemsDocument4 pagesStudy On Column Wise Design Compaction For Reconfigurable Systemsyame asfiaNo ratings yet
- Atom Electrosurgical SystemDocument40 pagesAtom Electrosurgical SystemOgut AjaNo ratings yet
- A Sequence - To - Sequence Approach For Remaining Useful Lifetime Estimation Using Attention Augmented Bidirectional LSTMDocument18 pagesA Sequence - To - Sequence Approach For Remaining Useful Lifetime Estimation Using Attention Augmented Bidirectional LSTMowais khanNo ratings yet
- EST3 Doc 1314957744Document6 pagesEST3 Doc 1314957744mandomagopoetaNo ratings yet
- A MEMS-Oriented Distributed Processor For Integrated Feedback ControllerDocument8 pagesA MEMS-Oriented Distributed Processor For Integrated Feedback ControllerAssem HNo ratings yet
- Happy New Year: October - December 2004Document4 pagesHappy New Year: October - December 2004kra_amNo ratings yet
- OTC 10945 Reliability Analysis of Permanent Downhole Monitoring SystemsDocument10 pagesOTC 10945 Reliability Analysis of Permanent Downhole Monitoring SystemsLulut Fitra FalaNo ratings yet
- Brochure Octopus SeriesDocument12 pagesBrochure Octopus SeriesRafael ReisNo ratings yet
- Cired: 21 International Conference On Electricity Distribution Frankfurt, 6-9 June 2011 Paper 0221Document4 pagesCired: 21 International Conference On Electricity Distribution Frankfurt, 6-9 June 2011 Paper 0221kotiniNo ratings yet
- IEC61850 Systems Using GOOSEDocument13 pagesIEC61850 Systems Using GOOSEJairo WilchesNo ratings yet
- Machine Learning To Communication SystemDocument10 pagesMachine Learning To Communication System冠廷李No ratings yet
- Fault Detection in Complex Mechatronic Systems by A Hi - 2024 - Reliability EngiDocument11 pagesFault Detection in Complex Mechatronic Systems by A Hi - 2024 - Reliability EngibihailantianmyNo ratings yet
- MEMSDocument8 pagesMEMSdevilsking578No ratings yet
- The National Electrical Safety Code (Nesc) Consensus: We Build ItDocument6 pagesThe National Electrical Safety Code (Nesc) Consensus: We Build ItHermes PolancoNo ratings yet
- Integrated Control System: Overview of TheDocument28 pagesIntegrated Control System: Overview of TheAmna MajidNo ratings yet
- Experiences With Wide Area Coordinated Control of Facts Devices and HVDC in A Real Time EnvironmentDocument6 pagesExperiences With Wide Area Coordinated Control of Facts Devices and HVDC in A Real Time EnvironmentDhilip KumarNo ratings yet
- A Multilayered Neural Network ControllerDocument5 pagesA Multilayered Neural Network ControllerAditya AgarwalNo ratings yet
- Application Policy For Computer-Based Control Systems in Substations: A ReviewDocument34 pagesApplication Policy For Computer-Based Control Systems in Substations: A ReviewJohn HarlandNo ratings yet
- Characteristic of Functional Subsystems of Electrical Grid Control CentersDocument6 pagesCharacteristic of Functional Subsystems of Electrical Grid Control Centersnam321985No ratings yet
- Robust Deadlock Detection and Control of Automated Manufacturing Systems With Multiple Unreliable Resources Using Petri NetsDocument13 pagesRobust Deadlock Detection and Control of Automated Manufacturing Systems With Multiple Unreliable Resources Using Petri NetssoniathalavoorNo ratings yet
- DC-UPS CatalogueDocument12 pagesDC-UPS CatalogueSergiy PogoryelovNo ratings yet
- A Hands-On Course On Mechatronics, Based On Modular Production SystemsDocument6 pagesA Hands-On Course On Mechatronics, Based On Modular Production SystemsAdil KhanNo ratings yet
- Fostering Intuitive Minds PDFDocument8 pagesFostering Intuitive Minds PDFAhosan HabibNo ratings yet
- A Multi-Agent System For Power Distribution Network Protection and Restoration: Designing Concepts and An Application PrototypeDocument9 pagesA Multi-Agent System For Power Distribution Network Protection and Restoration: Designing Concepts and An Application Prototypekhaizul813240No ratings yet
- Comparative Study of Networked Control System and Omnet++ Simulator Akhilesh TharakanDocument6 pagesComparative Study of Networked Control System and Omnet++ Simulator Akhilesh Tharakanakhil.24No ratings yet
- Optimized Control Scheme For Frequency P PDFDocument13 pagesOptimized Control Scheme For Frequency P PDFIrancell TellNo ratings yet
- Spectral Efficiency and Optimal Base Placement For I Door Wireless NetworksDocument11 pagesSpectral Efficiency and Optimal Base Placement For I Door Wireless NetworksMelissa KalkaNo ratings yet
- An Application of Building Automation SyDocument4 pagesAn Application of Building Automation Syiswanto bin SuwarnoNo ratings yet
- DC 9225 Exp6Document4 pagesDC 9225 Exp6Sankalp RaneNo ratings yet
- Distributed Real Time Architecture For D PDFDocument8 pagesDistributed Real Time Architecture For D PDFskwNo ratings yet
- Networked20control20system20 2020a20brief20surveyDocument11 pagesNetworked20control20system20 2020a20brief20surveySravanthi PaivarthiNo ratings yet
- Embedded Deep Learning: Algorithms, Architectures and Circuits for Always-on Neural Network ProcessingFrom EverandEmbedded Deep Learning: Algorithms, Architectures and Circuits for Always-on Neural Network ProcessingNo ratings yet
- Overcurrent Relay Advances for Modern Electricity NetworksFrom EverandOvercurrent Relay Advances for Modern Electricity NetworksNo ratings yet
- CGT Factors (Compensated Gross Tonnage Evaluation) PDFDocument11 pagesCGT Factors (Compensated Gross Tonnage Evaluation) PDFnavalzero910No ratings yet
- 1746-Pm001a-En-p 1747-BAS Module BASIC Programming ManualDocument144 pages1746-Pm001a-En-p 1747-BAS Module BASIC Programming ManualjaysonlkhNo ratings yet
- 06-TL - SS003 - E01 - 0 ZXSDR R8962 L23A Principle and Hardware Structure Training Manual-39Document39 pages06-TL - SS003 - E01 - 0 ZXSDR R8962 L23A Principle and Hardware Structure Training Manual-39a2227 jglNo ratings yet
- PHP 7.4.33 - PhpinfoDocument15 pagesPHP 7.4.33 - Phpinfoeuller.batista.partnerNo ratings yet
- TenTec Owner's Manual Omni-A and D Transceiver and Model 280 Power Supply, 1980.Document91 pagesTenTec Owner's Manual Omni-A and D Transceiver and Model 280 Power Supply, 1980.Bob Laughlin, KWØRL100% (2)
- How To Use RMAN To Check For Logical & Physical Database CorruptionDocument4 pagesHow To Use RMAN To Check For Logical & Physical Database Corruptionalok_mishra4533No ratings yet
- Introduction To Signals and Systems: M. J. Roberts All Rights Reserved. Edited by Dr. Robert AklDocument18 pagesIntroduction To Signals and Systems: M. J. Roberts All Rights Reserved. Edited by Dr. Robert Aklkumarsumit1942No ratings yet
- Pneumatic Valve - Viking Xtreme Series - Catalogue PDE2569TCUKDocument64 pagesPneumatic Valve - Viking Xtreme Series - Catalogue PDE2569TCUKBranko BabicNo ratings yet
- TEN 04 Timber Frame Structures - Platform Frame Construction (Part 2)Document7 pagesTEN 04 Timber Frame Structures - Platform Frame Construction (Part 2)dhanya1995100% (1)
- FHS Zoom Venus LightDocument4 pagesFHS Zoom Venus LightHasan AhmedNo ratings yet
- Asat Class ViiDocument15 pagesAsat Class ViiSunny BiswalNo ratings yet
- ANSYS Workbench - Simulation Introduction: Training ManualDocument4 pagesANSYS Workbench - Simulation Introduction: Training ManualShamik ChowdhuryNo ratings yet
- Embedded Systems: Embedded C Introduction To Embedded CDocument6 pagesEmbedded Systems: Embedded C Introduction To Embedded Cya vikaNo ratings yet
- TLP Modul 3Document32 pagesTLP Modul 3Fauzan MiracleNo ratings yet
- Dips PDFDocument2 pagesDips PDFRaghvendra ShrivastavaNo ratings yet
- Mensuration FormulasDocument12 pagesMensuration FormulasAmey KaleNo ratings yet
- Ee 451 Homework 7 Spring 2016Document2 pagesEe 451 Homework 7 Spring 2016michaelNo ratings yet
- OverheadsDocument22 pagesOverheadsOlha LNo ratings yet
- Torque Values For Isolating Gaskets On ASME B16.5 and ASME B16.47 Series....Document1 pageTorque Values For Isolating Gaskets On ASME B16.5 and ASME B16.47 Series....Shijumon Kp100% (2)
- Ooad Lab ManualDocument29 pagesOoad Lab ManualDevendra BhagyawantNo ratings yet
- CT - Residual CT - Effect of HarmonicDocument4 pagesCT - Residual CT - Effect of HarmonicSandeep PartiNo ratings yet
- Textbook Hands On Machine Learning With Scikit Learn and Tensorflow 1St Edition Aurelien Geron Ebook All Chapter PDFDocument63 pagesTextbook Hands On Machine Learning With Scikit Learn and Tensorflow 1St Edition Aurelien Geron Ebook All Chapter PDFverna.sanchez935100% (13)
- Manajemen Cairan Dan Elektrolit Pada PmebedahanDocument34 pagesManajemen Cairan Dan Elektrolit Pada PmebedahanZaniaNo ratings yet
- 1SVR550029R8100 CT Mfe Time Relay Multifunction 1c o 0 05s 100h 24 240vac DCDocument3 pages1SVR550029R8100 CT Mfe Time Relay Multifunction 1c o 0 05s 100h 24 240vac DCElsonAlfredoEscobarArosNo ratings yet
- Argenta VisDocument8 pagesArgenta VisMane PfundNo ratings yet
- Taxi Demand Prediction Using Ensemble Model Based On Rnns and XgboostDocument6 pagesTaxi Demand Prediction Using Ensemble Model Based On Rnns and XgboostChandra SekharNo ratings yet
- Luce Psychological Review 1963Document19 pagesLuce Psychological Review 1963aritrayeebarman05No ratings yet