
Photoelectric - Proximity - Sensors II
Photoelectric - Proximity - Sensors II
You might also like
- Gopro For Beginners Cheat SheetDocument1 pageGopro For Beginners Cheat SheetĢuruĴKathirNo ratings yet
- Super Resolution Microscopy 4pi and STED.Document14 pagesSuper Resolution Microscopy 4pi and STED.crchawda100% (1)
- LCD SLMDocument9 pagesLCD SLMVipin_Kumar_5649No ratings yet
- Laser Ranging: A Critical Review of Usual Techniques For Distance MeasurementDocument10 pagesLaser Ranging: A Critical Review of Usual Techniques For Distance MeasurementDanny100% (1)
- Photoelectric Retro-Reflective Sensors IIDocument46 pagesPhotoelectric Retro-Reflective Sensors IIdangtrunghieu01122001No ratings yet
- JETIREO06035Document7 pagesJETIREO06035HelloNo ratings yet
- Tao 2012Document4 pagesTao 2012Shofi MuktianaNo ratings yet
- Kshitij SynopsisDocument8 pagesKshitij SynopsisJADHAV KUNALNo ratings yet
- IJETR021736Document4 pagesIJETR021736erpublicationNo ratings yet
- Laser Scanning MicrosDocument13 pagesLaser Scanning MicrosHà An Đỗ NgọcNo ratings yet
- Concealed Weapon DetectionDocument10 pagesConcealed Weapon DetectionPoreddy Rajesh ReddyNo ratings yet
- Elements of RSDocument7 pagesElements of RSSidra Saleem 296 SaleemNo ratings yet
- Lemaster 2017Document12 pagesLemaster 2017Alex PavloffNo ratings yet
- UCC14 - RS - GIS - Unit 1 - PhotogeologyDocument19 pagesUCC14 - RS - GIS - Unit 1 - PhotogeologyYamunaNo ratings yet
- Microwave and Infrared Digital Anti-Mask Motion Detector V Description Features Relay Operation DetailsDocument2 pagesMicrowave and Infrared Digital Anti-Mask Motion Detector V Description Features Relay Operation DetailsJulio Cesar Rojas SaavedraNo ratings yet
- Benewake Tfmini DatasheetDocument10 pagesBenewake Tfmini DatasheetDimas R PratamaNo ratings yet
- LiDAR TF Mini DatasheetDocument9 pagesLiDAR TF Mini DatasheetKen DarghiNo ratings yet
- Exploring The Usefulness of Light Field Camera For Biometrics: An Empirical Study On Face and Iris RecognitionDocument16 pagesExploring The Usefulness of Light Field Camera For Biometrics: An Empirical Study On Face and Iris RecognitionWafa BenzaouiNo ratings yet
- Object Recognition in Infrared Image Sequences Using Scale Invariant Feature TransformDocument9 pagesObject Recognition in Infrared Image Sequences Using Scale Invariant Feature TransformJesycaFuenmayorNo ratings yet
- DOF SEM IEEE-CARE2013 - MarturiDocument7 pagesDOF SEM IEEE-CARE2013 - Marturijoshsp111No ratings yet
- UCC14 RS & GIS Unit 1 Photogeology HandoutsDocument20 pagesUCC14 RS & GIS Unit 1 Photogeology HandoutsYamunaNo ratings yet
- Object Detection and Tracking in Thermal Video Using Directed Acyclic Graph (Dag)Document10 pagesObject Detection and Tracking in Thermal Video Using Directed Acyclic Graph (Dag)duonghieu010698vnNo ratings yet
- Tech - Seminar ReportDocument12 pagesTech - Seminar Reportpreeti kadrolliNo ratings yet
- (IJIT-V6I4P11) :madhankumar YDocument6 pages(IJIT-V6I4P11) :madhankumar YIJITJournalsNo ratings yet
- Ijett V67i3p224Document7 pagesIjett V67i3p224ranarajnish25No ratings yet
- Youn': Entrance Detection of A Moving Object Using Intensity Average Variation of Subtraction ImagesDocument6 pagesYoun': Entrance Detection of A Moving Object Using Intensity Average Variation of Subtraction ImagesleninbNo ratings yet
- Face Detection in The Near-IR SpectrumDocument12 pagesFace Detection in The Near-IR SpectrumMuhammad waqas87No ratings yet
- April 3, 2012 Basic Remote Sensing 1Document83 pagesApril 3, 2012 Basic Remote Sensing 1Aemro LoveNo ratings yet
- A Literature Review of Object Detection Using YOLOv4 DetectorDocument7 pagesA Literature Review of Object Detection Using YOLOv4 DetectorIJRASETPublicationsNo ratings yet
- Cc107-Smoke Detection Using MQ-2 Sensor in Blinq AppDocument22 pagesCc107-Smoke Detection Using MQ-2 Sensor in Blinq AppNARESH PODALAKURUNo ratings yet
- Depth Resolution Enhancement in Time-of-FlightDocument9 pagesDepth Resolution Enhancement in Time-of-Flightweikanglai99No ratings yet
- Applsci 13 12977Document21 pagesApplsci 13 12977gopineedivigneshNo ratings yet
- 03 Photoelectric Retro-Reflective Sensors COMMENTSDocument46 pages03 Photoelectric Retro-Reflective Sensors COMMENTSPatrick Van HimstNo ratings yet
- Calibration of Uncooled Thermal Infrared CamerasDocument11 pagesCalibration of Uncooled Thermal Infrared Camerasing jyaNo ratings yet
- Face Mask Wearing Detection WithDocument79 pagesFace Mask Wearing Detection WithMerajul islamNo ratings yet
- Rapid Detection of Camouflaged Artificial Target Based On Polarization Imaging and Deep LearningDocument9 pagesRapid Detection of Camouflaged Artificial Target Based On Polarization Imaging and Deep Learningrprok2002No ratings yet
- Remotesensing 16 01641Document21 pagesRemotesensing 16 01641Adeliton DelkNo ratings yet
- PF Distancesensor CaalogDocument32 pagesPF Distancesensor CaalogsoloNo ratings yet
- Ijivp V3 I1 Paper 6 479 484Document6 pagesIjivp V3 I1 Paper 6 479 484V ArunachalamNo ratings yet
- Survey of Object Detection Approaches in Embedded Platforms: Ii. Literature ReviewDocument5 pagesSurvey of Object Detection Approaches in Embedded Platforms: Ii. Literature ReviewEshwar KamsaliNo ratings yet
- Proceedings of Spie: Radar For Indoor Surveillance: State of Art and PerspectivesDocument11 pagesProceedings of Spie: Radar For Indoor Surveillance: State of Art and Perspectivesatalasa-1No ratings yet
- Moving Object Detection For Real-Time ApplicationsDocument6 pagesMoving Object Detection For Real-Time ApplicationsSaeideh OraeiNo ratings yet
- Cali Opt Prox SensorDocument5 pagesCali Opt Prox SensorbehzadNo ratings yet
- Remotesensing 15 03265Document29 pagesRemotesensing 15 03265tinaahmed.usmNo ratings yet
- Laurent 2013 PerformanceDocument13 pagesLaurent 2013 Performancetaras.yakymchukNo ratings yet
- 369IJCTET2016043006Document5 pages369IJCTET2016043006Koush RastogiNo ratings yet
- Human Object Tracking Using Background Subtraction and Shadow Removal TechniqueDocument5 pagesHuman Object Tracking Using Background Subtraction and Shadow Removal TechniqueAkrit SoinNo ratings yet
- SLAC-TN-10-016: Work Supported in Part by US Department of Energy Contract DE-AC02-76SF00515Document17 pagesSLAC-TN-10-016: Work Supported in Part by US Department of Energy Contract DE-AC02-76SF00515oscarcmNo ratings yet
- Basics of Photoelectric Sensors and Applications: Bernhard Wieser, M.SCDocument54 pagesBasics of Photoelectric Sensors and Applications: Bernhard Wieser, M.SCAlu menzikenNo ratings yet
- Pyroelectric InfraRed Sensors Based Distance EstimDocument5 pagesPyroelectric InfraRed Sensors Based Distance EstimCaxas BikersNo ratings yet
- Few-Shot Object Detection On Remote Sensing ImagesDocument14 pagesFew-Shot Object Detection On Remote Sensing ImagesNeha NehaNo ratings yet
- Stationary Object DetectionDocument4 pagesStationary Object DetectionRudrani MondalNo ratings yet
- EisyaDocument4 pagesEisyafirdausmeow045No ratings yet
- IEEE Transactions On Nuclear Science, Vol. 69, No. 7, Pp. 1651-1658Document9 pagesIEEE Transactions On Nuclear Science, Vol. 69, No. 7, Pp. 1651-1658Luciana De MiccoNo ratings yet
- Remote SensingDocument19 pagesRemote SensingMeet BhaliyaNo ratings yet
- 2005.00305v3 - Defocus Deblurring Using Dual-Pixel DataDocument27 pages2005.00305v3 - Defocus Deblurring Using Dual-Pixel DatageilsonNo ratings yet
- Night Vision Technology Vtu 2019Document23 pagesNight Vision Technology Vtu 2019Shashank BaskaranNo ratings yet
- Gaze Controlled Gun: AbstractDocument3 pagesGaze Controlled Gun: AbstracterpublicationNo ratings yet
- Laboratory No. 6 Proximity SensorsDocument2 pagesLaboratory No. 6 Proximity SensorsNicol Nogales NuñezNo ratings yet
- Ijarcce 200Document3 pagesIjarcce 200Saeideh OraeiNo ratings yet
- Throughbeam - Photoelectric - Sensors IIDocument34 pagesThroughbeam - Photoelectric - Sensors IIdangtrunghieu01122001No ratings yet
- Pisaeb 812 b1Document20 pagesPisaeb 812 b1dangtrunghieu01122001No ratings yet
- Pic120e241c 3Document22 pagesPic120e241c 3dangtrunghieu01122001No ratings yet
- Pic240e241c 1Document22 pagesPic240e241c 1dangtrunghieu01122001No ratings yet
- Photoelectric Retro-Reflective Sensors IIDocument46 pagesPhotoelectric Retro-Reflective Sensors IIdangtrunghieu01122001No ratings yet
- 2013.493.195 - Large-Scale Nanophotonic Phased ArrayDocument5 pages2013.493.195 - Large-Scale Nanophotonic Phased ArrayzhangsanNo ratings yet
- Chapter 11Document52 pagesChapter 11Mike JingNo ratings yet
- Best LED Grow Lights (Buying Guide: Updated Comparison List)Document4 pagesBest LED Grow Lights (Buying Guide: Updated Comparison List)dannie gaoNo ratings yet
- History of PhotogDocument4 pagesHistory of PhotogZac GarciaNo ratings yet
- Fiberstars Pool 10 CatalogDocument80 pagesFiberstars Pool 10 CatalogpckiriginchNo ratings yet
- 8.2 Waves-NewDocument61 pages8.2 Waves-Newchowdhury jumainaNo ratings yet
- Glasses For PhotonicsDocument283 pagesGlasses For PhotonicsSalah-Eddine NasmiNo ratings yet
- Ultimate Iray Skin Manager DocumentationDocument13 pagesUltimate Iray Skin Manager DocumentationmatiasNo ratings yet
- Dsdh-Sd49225in-Hc-S3 Camara Tipo PTZDocument3 pagesDsdh-Sd49225in-Hc-S3 Camara Tipo PTZDIANANo ratings yet
- Tunnel Effect &AFM-STMDocument21 pagesTunnel Effect &AFM-STMAgnivesh SharmaNo ratings yet
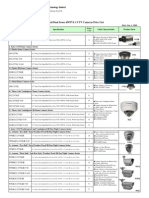
- Vigital Dual Sense 450TVL CCTV Cameras Price ListDocument3 pagesVigital Dual Sense 450TVL CCTV Cameras Price ListRichard He100% (2)
- LASER and Its Application PDFDocument41 pagesLASER and Its Application PDFAhadNo ratings yet
- Transmission LinesDocument23 pagesTransmission Linesravi010582No ratings yet
- TKH Security Siqura bc822v2h3 AsDocument6 pagesTKH Security Siqura bc822v2h3 AsEhsan RohaniNo ratings yet
- Membership PPN 2006 NovDocument18 pagesMembership PPN 2006 NovsteveNo ratings yet
- Lambertian SourcesDocument19 pagesLambertian SourcesHammadi2No ratings yet
- All India Test Series NEET Syllabus - 3Document1 pageAll India Test Series NEET Syllabus - 3It's KetanNo ratings yet
- Antenna & Wave PropagationDocument3 pagesAntenna & Wave PropagationShakshi AgarwalNo ratings yet
- Hyphenated TechniquesDocument3 pagesHyphenated TechniquesKhawar KhalidNo ratings yet
- Sia PDFDocument47 pagesSia PDFNavneetNo ratings yet
- Dispersion in Fiber OpticDocument1 pageDispersion in Fiber OpticAbdulrahnman ItaniNo ratings yet
- Analytical Study and Optical Design of Offner Based Hyperspectral Imager in Vnir RegionDocument69 pagesAnalytical Study and Optical Design of Offner Based Hyperspectral Imager in Vnir RegionTanushrii Ramesh100% (1)
- Uv Vis SpectrophotometerDocument7 pagesUv Vis SpectrophotometerFath Bond100% (1)
- 12.3 Perform An Activity - The Refraction of Light Through Different MediaDocument2 pages12.3 Perform An Activity - The Refraction of Light Through Different MediaRajeshri SoniNo ratings yet
- Geometric Ring Max LED enDocument7 pagesGeometric Ring Max LED enStefan CiupituNo ratings yet
- Children and Their Development 6th Edition Kail Test BankDocument33 pagesChildren and Their Development 6th Edition Kail Test Bankdaywoman.frachozbkywc100% (35)
- Leica m6Document44 pagesLeica m6ΆνναΓαλάνηNo ratings yet
- Led DataDocument171 pagesLed DataNitin PawarNo ratings yet




























































































Download as pdf or txt
You might also like
- Gopro For Beginners Cheat SheetDocument1 pageGopro For Beginners Cheat SheetĢuruĴKathirNo ratings yet
- Super Resolution Microscopy 4pi and STED.Document14 pagesSuper Resolution Microscopy 4pi and STED.crchawda100% (1)
- LCD SLMDocument9 pagesLCD SLMVipin_Kumar_5649No ratings yet
- Laser Ranging: A Critical Review of Usual Techniques For Distance MeasurementDocument10 pagesLaser Ranging: A Critical Review of Usual Techniques For Distance MeasurementDanny100% (1)
- Photoelectric Retro-Reflective Sensors IIDocument46 pagesPhotoelectric Retro-Reflective Sensors IIdangtrunghieu01122001No ratings yet
- JETIREO06035Document7 pagesJETIREO06035HelloNo ratings yet
- Tao 2012Document4 pagesTao 2012Shofi MuktianaNo ratings yet
- Kshitij SynopsisDocument8 pagesKshitij SynopsisJADHAV KUNALNo ratings yet
- IJETR021736Document4 pagesIJETR021736erpublicationNo ratings yet
- Laser Scanning MicrosDocument13 pagesLaser Scanning MicrosHà An Đỗ NgọcNo ratings yet
- Concealed Weapon DetectionDocument10 pagesConcealed Weapon DetectionPoreddy Rajesh ReddyNo ratings yet
- Elements of RSDocument7 pagesElements of RSSidra Saleem 296 SaleemNo ratings yet
- Lemaster 2017Document12 pagesLemaster 2017Alex PavloffNo ratings yet
- UCC14 - RS - GIS - Unit 1 - PhotogeologyDocument19 pagesUCC14 - RS - GIS - Unit 1 - PhotogeologyYamunaNo ratings yet
- Microwave and Infrared Digital Anti-Mask Motion Detector V Description Features Relay Operation DetailsDocument2 pagesMicrowave and Infrared Digital Anti-Mask Motion Detector V Description Features Relay Operation DetailsJulio Cesar Rojas SaavedraNo ratings yet
- Benewake Tfmini DatasheetDocument10 pagesBenewake Tfmini DatasheetDimas R PratamaNo ratings yet
- LiDAR TF Mini DatasheetDocument9 pagesLiDAR TF Mini DatasheetKen DarghiNo ratings yet
- Exploring The Usefulness of Light Field Camera For Biometrics: An Empirical Study On Face and Iris RecognitionDocument16 pagesExploring The Usefulness of Light Field Camera For Biometrics: An Empirical Study On Face and Iris RecognitionWafa BenzaouiNo ratings yet
- Object Recognition in Infrared Image Sequences Using Scale Invariant Feature TransformDocument9 pagesObject Recognition in Infrared Image Sequences Using Scale Invariant Feature TransformJesycaFuenmayorNo ratings yet
- DOF SEM IEEE-CARE2013 - MarturiDocument7 pagesDOF SEM IEEE-CARE2013 - Marturijoshsp111No ratings yet
- UCC14 RS & GIS Unit 1 Photogeology HandoutsDocument20 pagesUCC14 RS & GIS Unit 1 Photogeology HandoutsYamunaNo ratings yet
- Object Detection and Tracking in Thermal Video Using Directed Acyclic Graph (Dag)Document10 pagesObject Detection and Tracking in Thermal Video Using Directed Acyclic Graph (Dag)duonghieu010698vnNo ratings yet
- Tech - Seminar ReportDocument12 pagesTech - Seminar Reportpreeti kadrolliNo ratings yet
- (IJIT-V6I4P11) :madhankumar YDocument6 pages(IJIT-V6I4P11) :madhankumar YIJITJournalsNo ratings yet
- Ijett V67i3p224Document7 pagesIjett V67i3p224ranarajnish25No ratings yet
- Youn': Entrance Detection of A Moving Object Using Intensity Average Variation of Subtraction ImagesDocument6 pagesYoun': Entrance Detection of A Moving Object Using Intensity Average Variation of Subtraction ImagesleninbNo ratings yet
- Face Detection in The Near-IR SpectrumDocument12 pagesFace Detection in The Near-IR SpectrumMuhammad waqas87No ratings yet
- April 3, 2012 Basic Remote Sensing 1Document83 pagesApril 3, 2012 Basic Remote Sensing 1Aemro LoveNo ratings yet
- A Literature Review of Object Detection Using YOLOv4 DetectorDocument7 pagesA Literature Review of Object Detection Using YOLOv4 DetectorIJRASETPublicationsNo ratings yet
- Cc107-Smoke Detection Using MQ-2 Sensor in Blinq AppDocument22 pagesCc107-Smoke Detection Using MQ-2 Sensor in Blinq AppNARESH PODALAKURUNo ratings yet
- Depth Resolution Enhancement in Time-of-FlightDocument9 pagesDepth Resolution Enhancement in Time-of-Flightweikanglai99No ratings yet
- Applsci 13 12977Document21 pagesApplsci 13 12977gopineedivigneshNo ratings yet
- 03 Photoelectric Retro-Reflective Sensors COMMENTSDocument46 pages03 Photoelectric Retro-Reflective Sensors COMMENTSPatrick Van HimstNo ratings yet
- Calibration of Uncooled Thermal Infrared CamerasDocument11 pagesCalibration of Uncooled Thermal Infrared Camerasing jyaNo ratings yet
- Face Mask Wearing Detection WithDocument79 pagesFace Mask Wearing Detection WithMerajul islamNo ratings yet
- Rapid Detection of Camouflaged Artificial Target Based On Polarization Imaging and Deep LearningDocument9 pagesRapid Detection of Camouflaged Artificial Target Based On Polarization Imaging and Deep Learningrprok2002No ratings yet
- Remotesensing 16 01641Document21 pagesRemotesensing 16 01641Adeliton DelkNo ratings yet
- PF Distancesensor CaalogDocument32 pagesPF Distancesensor CaalogsoloNo ratings yet
- Ijivp V3 I1 Paper 6 479 484Document6 pagesIjivp V3 I1 Paper 6 479 484V ArunachalamNo ratings yet
- Survey of Object Detection Approaches in Embedded Platforms: Ii. Literature ReviewDocument5 pagesSurvey of Object Detection Approaches in Embedded Platforms: Ii. Literature ReviewEshwar KamsaliNo ratings yet
- Proceedings of Spie: Radar For Indoor Surveillance: State of Art and PerspectivesDocument11 pagesProceedings of Spie: Radar For Indoor Surveillance: State of Art and Perspectivesatalasa-1No ratings yet
- Moving Object Detection For Real-Time ApplicationsDocument6 pagesMoving Object Detection For Real-Time ApplicationsSaeideh OraeiNo ratings yet
- Cali Opt Prox SensorDocument5 pagesCali Opt Prox SensorbehzadNo ratings yet
- Remotesensing 15 03265Document29 pagesRemotesensing 15 03265tinaahmed.usmNo ratings yet
- Laurent 2013 PerformanceDocument13 pagesLaurent 2013 Performancetaras.yakymchukNo ratings yet
- 369IJCTET2016043006Document5 pages369IJCTET2016043006Koush RastogiNo ratings yet
- Human Object Tracking Using Background Subtraction and Shadow Removal TechniqueDocument5 pagesHuman Object Tracking Using Background Subtraction and Shadow Removal TechniqueAkrit SoinNo ratings yet
- SLAC-TN-10-016: Work Supported in Part by US Department of Energy Contract DE-AC02-76SF00515Document17 pagesSLAC-TN-10-016: Work Supported in Part by US Department of Energy Contract DE-AC02-76SF00515oscarcmNo ratings yet
- Basics of Photoelectric Sensors and Applications: Bernhard Wieser, M.SCDocument54 pagesBasics of Photoelectric Sensors and Applications: Bernhard Wieser, M.SCAlu menzikenNo ratings yet
- Pyroelectric InfraRed Sensors Based Distance EstimDocument5 pagesPyroelectric InfraRed Sensors Based Distance EstimCaxas BikersNo ratings yet
- Few-Shot Object Detection On Remote Sensing ImagesDocument14 pagesFew-Shot Object Detection On Remote Sensing ImagesNeha NehaNo ratings yet
- Stationary Object DetectionDocument4 pagesStationary Object DetectionRudrani MondalNo ratings yet
- EisyaDocument4 pagesEisyafirdausmeow045No ratings yet
- IEEE Transactions On Nuclear Science, Vol. 69, No. 7, Pp. 1651-1658Document9 pagesIEEE Transactions On Nuclear Science, Vol. 69, No. 7, Pp. 1651-1658Luciana De MiccoNo ratings yet
- Remote SensingDocument19 pagesRemote SensingMeet BhaliyaNo ratings yet
- 2005.00305v3 - Defocus Deblurring Using Dual-Pixel DataDocument27 pages2005.00305v3 - Defocus Deblurring Using Dual-Pixel DatageilsonNo ratings yet
- Night Vision Technology Vtu 2019Document23 pagesNight Vision Technology Vtu 2019Shashank BaskaranNo ratings yet
- Gaze Controlled Gun: AbstractDocument3 pagesGaze Controlled Gun: AbstracterpublicationNo ratings yet
- Laboratory No. 6 Proximity SensorsDocument2 pagesLaboratory No. 6 Proximity SensorsNicol Nogales NuñezNo ratings yet
- Ijarcce 200Document3 pagesIjarcce 200Saeideh OraeiNo ratings yet
- Throughbeam - Photoelectric - Sensors IIDocument34 pagesThroughbeam - Photoelectric - Sensors IIdangtrunghieu01122001No ratings yet
- Pisaeb 812 b1Document20 pagesPisaeb 812 b1dangtrunghieu01122001No ratings yet
- Pic120e241c 3Document22 pagesPic120e241c 3dangtrunghieu01122001No ratings yet
- Pic240e241c 1Document22 pagesPic240e241c 1dangtrunghieu01122001No ratings yet
- Photoelectric Retro-Reflective Sensors IIDocument46 pagesPhotoelectric Retro-Reflective Sensors IIdangtrunghieu01122001No ratings yet
- 2013.493.195 - Large-Scale Nanophotonic Phased ArrayDocument5 pages2013.493.195 - Large-Scale Nanophotonic Phased ArrayzhangsanNo ratings yet
- Chapter 11Document52 pagesChapter 11Mike JingNo ratings yet
- Best LED Grow Lights (Buying Guide: Updated Comparison List)Document4 pagesBest LED Grow Lights (Buying Guide: Updated Comparison List)dannie gaoNo ratings yet
- History of PhotogDocument4 pagesHistory of PhotogZac GarciaNo ratings yet
- Fiberstars Pool 10 CatalogDocument80 pagesFiberstars Pool 10 CatalogpckiriginchNo ratings yet
- 8.2 Waves-NewDocument61 pages8.2 Waves-Newchowdhury jumainaNo ratings yet
- Glasses For PhotonicsDocument283 pagesGlasses For PhotonicsSalah-Eddine NasmiNo ratings yet
- Ultimate Iray Skin Manager DocumentationDocument13 pagesUltimate Iray Skin Manager DocumentationmatiasNo ratings yet
- Dsdh-Sd49225in-Hc-S3 Camara Tipo PTZDocument3 pagesDsdh-Sd49225in-Hc-S3 Camara Tipo PTZDIANANo ratings yet
- Tunnel Effect &AFM-STMDocument21 pagesTunnel Effect &AFM-STMAgnivesh SharmaNo ratings yet
- Vigital Dual Sense 450TVL CCTV Cameras Price ListDocument3 pagesVigital Dual Sense 450TVL CCTV Cameras Price ListRichard He100% (2)
- LASER and Its Application PDFDocument41 pagesLASER and Its Application PDFAhadNo ratings yet
- Transmission LinesDocument23 pagesTransmission Linesravi010582No ratings yet
- TKH Security Siqura bc822v2h3 AsDocument6 pagesTKH Security Siqura bc822v2h3 AsEhsan RohaniNo ratings yet
- Membership PPN 2006 NovDocument18 pagesMembership PPN 2006 NovsteveNo ratings yet
- Lambertian SourcesDocument19 pagesLambertian SourcesHammadi2No ratings yet
- All India Test Series NEET Syllabus - 3Document1 pageAll India Test Series NEET Syllabus - 3It's KetanNo ratings yet
- Antenna & Wave PropagationDocument3 pagesAntenna & Wave PropagationShakshi AgarwalNo ratings yet
- Hyphenated TechniquesDocument3 pagesHyphenated TechniquesKhawar KhalidNo ratings yet
- Sia PDFDocument47 pagesSia PDFNavneetNo ratings yet
- Dispersion in Fiber OpticDocument1 pageDispersion in Fiber OpticAbdulrahnman ItaniNo ratings yet
- Analytical Study and Optical Design of Offner Based Hyperspectral Imager in Vnir RegionDocument69 pagesAnalytical Study and Optical Design of Offner Based Hyperspectral Imager in Vnir RegionTanushrii Ramesh100% (1)
- Uv Vis SpectrophotometerDocument7 pagesUv Vis SpectrophotometerFath Bond100% (1)
- 12.3 Perform An Activity - The Refraction of Light Through Different MediaDocument2 pages12.3 Perform An Activity - The Refraction of Light Through Different MediaRajeshri SoniNo ratings yet
- Geometric Ring Max LED enDocument7 pagesGeometric Ring Max LED enStefan CiupituNo ratings yet
- Children and Their Development 6th Edition Kail Test BankDocument33 pagesChildren and Their Development 6th Edition Kail Test Bankdaywoman.frachozbkywc100% (35)
- Leica m6Document44 pagesLeica m6ΆνναΓαλάνηNo ratings yet
- Led DataDocument171 pagesLed DataNitin PawarNo ratings yet