
Modulated Model Predictive Speed Controller For PMSM Drives Employing Voltage Based Cost Function
Modulated Model Predictive Speed Controller For PMSM Drives Employing Voltage Based Cost Function
You might also like
- DO-260 - MOPS For ADS-B PDFDocument898 pagesDO-260 - MOPS For ADS-B PDFHai AuNo ratings yet
- F120 - F160 Peco ManualDocument44 pagesF120 - F160 Peco ManualBernie WireNo ratings yet
- AAU5613 Product Description: Huawei Technologies Co., LTDDocument11 pagesAAU5613 Product Description: Huawei Technologies Co., LTDRubén FernándezNo ratings yet
- Modularis Service PDFDocument63 pagesModularis Service PDFVictor ZambranoNo ratings yet
- IPMSM Model Predictive Control in Flux-Weakening Operation Using An Improved AlgorithmDocument10 pagesIPMSM Model Predictive Control in Flux-Weakening Operation Using An Improved Algorithmalaref elhajNo ratings yet
- Wa0000 PDFDocument8 pagesWa0000 PDFAlvaajid SaleemNo ratings yet
- Electrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandDocument8 pagesElectrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandNabin AdhikariNo ratings yet
- Adaptive Speed Control For Permanent-Magnet Synchronous Motor System With Variations of Load InertiaDocument10 pagesAdaptive Speed Control For Permanent-Magnet Synchronous Motor System With Variations of Load InertiaRawaz Hama Aziz H.KarimNo ratings yet
- Research ArticleDocument8 pagesResearch Articletariq76No ratings yet
- Model Free DFIGDocument12 pagesModel Free DFIG程崇律No ratings yet
- 2018 - A Comparison of Finite Control Set and Continuous Control Set Model Predictive Control Schemes For Speed Control of Induction MotorsDocument13 pages2018 - A Comparison of Finite Control Set and Continuous Control Set Model Predictive Control Schemes For Speed Control of Induction MotorsjemmyducNo ratings yet
- Optimum Design of Proportional-Integral Controllers in Grid-Integrated PMSG-based Wind Energy Conversion SystemDocument26 pagesOptimum Design of Proportional-Integral Controllers in Grid-Integrated PMSG-based Wind Energy Conversion SystemPriyanka GuptaNo ratings yet
- 10.1007@s42835 019 00256 0Document8 pages10.1007@s42835 019 00256 0anurag savarnNo ratings yet
- Juan Manuel Mauricio 2008Document11 pagesJuan Manuel Mauricio 2008oualid zouggarNo ratings yet
- Valve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodDocument8 pagesValve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodsivaNo ratings yet
- Energies 16 01245Document15 pagesEnergies 16 01245mohammad omarNo ratings yet
- Optimized Load Frequency Control For Single Area Power System Using Linear Quadratic Gaussian Technique and Coefficient Diagram MethodDocument17 pagesOptimized Load Frequency Control For Single Area Power System Using Linear Quadratic Gaussian Technique and Coefficient Diagram Methodاسأل شجر اللوزNo ratings yet
- AGC Dynamic Simulation in PSSEDocument11 pagesAGC Dynamic Simulation in PSSEAmr KamalNo ratings yet
- High Performance Position Control of Permanent Magnet Synchronous DrivesDocument11 pagesHigh Performance Position Control of Permanent Magnet Synchronous DrivesdjoodjooNo ratings yet
- 01 Actuators-10-00147Document16 pages01 Actuators-10-00147fvijayamiNo ratings yet
- Asymptotically Stable Predictive Control of Grid-Connected Converter Based On Discrete Space Vector ModulationDocument11 pagesAsymptotically Stable Predictive Control of Grid-Connected Converter Based On Discrete Space Vector ModulationTulio Ernesto Hernandez RamirezNo ratings yet
- Optimized Field Oriented Control Design by Multi Objective OptimizationDocument7 pagesOptimized Field Oriented Control Design by Multi Objective OptimizationHùng MạnhNo ratings yet
- MPC A Simple and Powerful Method To Control Power ConvertersDocument13 pagesMPC A Simple and Powerful Method To Control Power ConvertersDavidNo ratings yet
- Article 2Document20 pagesArticle 2hafiddjouadi36No ratings yet
- Điều chỉnh tốc độ cho ổ đĩa PMSM dựa trên bộ điều khiển chế độ trượt mớiDocument8 pagesĐiều chỉnh tốc độ cho ổ đĩa PMSM dựa trên bộ điều khiển chế độ trượt mớiNguyễn Văn HoàNo ratings yet
- Identification of Dynamic Equivalents Based On Heuristic Optimization For Smart Grid Applications2012Document8 pagesIdentification of Dynamic Equivalents Based On Heuristic Optimization For Smart Grid Applications2012gabriveragNo ratings yet
- Electronics 10 02080 With CoverDocument37 pagesElectronics 10 02080 With CoverMarcel NicolaNo ratings yet
- Speed Ripple Minimization of Permanent Magnet Synchronous Motor Based On Model Predictive and Iterative Learning ControlsDocument10 pagesSpeed Ripple Minimization of Permanent Magnet Synchronous Motor Based On Model Predictive and Iterative Learning ControlsnhatvpNo ratings yet
- Optimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationDocument6 pagesOptimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationLIEW HUI FANG UNIMAPNo ratings yet
- Optimization of Load Frequency Control of Different Area System Based On Genetic AlgorithmDocument6 pagesOptimization of Load Frequency Control of Different Area System Based On Genetic AlgorithmInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Machine Learning Based Adaptive PredictionDocument9 pagesMachine Learning Based Adaptive PredictionnhatvpNo ratings yet
- IET PE DraftDocument11 pagesIET PE DraftArghya ChakravartyNo ratings yet
- Seamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftDocument11 pagesSeamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftBadal PatnaikNo ratings yet
- SMC DobDocument9 pagesSMC DobNguyễn Văn HoàNo ratings yet
- Research Article: Observer-Based Robust Control For Hydraulic Velocity Control SystemDocument10 pagesResearch Article: Observer-Based Robust Control For Hydraulic Velocity Control SystemNehal ANo ratings yet
- Article 1Document12 pagesArticle 1soroush.atashin93No ratings yet
- PSO Technique Applied To Sensorless Field-Oriented Control PMSM Drive With Discretized RL-fractional IntegralDocument12 pagesPSO Technique Applied To Sensorless Field-Oriented Control PMSM Drive With Discretized RL-fractional IntegralfvijayamiNo ratings yet
- Robotics 12 00105 v2Document16 pagesRobotics 12 00105 v2venkatesh allamNo ratings yet
- Speed Control Design of A PMSM Based On Functional Model Predictive ApproachDocument15 pagesSpeed Control Design of A PMSM Based On Functional Model Predictive Approachhieuhuech1No ratings yet
- An Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveDocument10 pagesAn Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveAbd DawaraNo ratings yet
- Kamal DinDocument11 pagesKamal DinGabriel Herrera GonzalezNo ratings yet
- Computationally Efficient Self Tuning Controller For DC DC Switch Mode Power Converters Based On Partial Update Kalman Filter SingleDocument24 pagesComputationally Efficient Self Tuning Controller For DC DC Switch Mode Power Converters Based On Partial Update Kalman Filter SingleMairaj-ud-din MuftiNo ratings yet
- Continuum Adapative ControlDocument14 pagesContinuum Adapative Controlabdelhamid.ghoul93No ratings yet
- Improved Non-Singular Fast Terminal Sliding Mode Control With Disturbance Observer For PMSM Drives Motor2Document10 pagesImproved Non-Singular Fast Terminal Sliding Mode Control With Disturbance Observer For PMSM Drives Motor2widyadhari.anindyaNo ratings yet
- 1 s2.0 S0378779617303528 MainDocument12 pages1 s2.0 S0378779617303528 MainAmirreza ZarepourNo ratings yet
- Impedance and Stability Analysis of A Permanent Magnet Synchronous Generator System For More Electric AircraftDocument6 pagesImpedance and Stability Analysis of A Permanent Magnet Synchronous Generator System For More Electric AircraftAngel Benites HornaNo ratings yet
- Robust Sliding Mode Control For Robot ManipulatorsDocument10 pagesRobust Sliding Mode Control For Robot Manipulatorshoàng nguyễnNo ratings yet
- Design A Robust Proportional-Derivative Gain-SchedDocument21 pagesDesign A Robust Proportional-Derivative Gain-SchedsNo ratings yet
- Adaptive MPC Current Control-4Document8 pagesAdaptive MPC Current Control-4sainadh saiNo ratings yet
- Zhang 2020Document11 pagesZhang 2020Lê Đức ThịnhNo ratings yet
- co_12Document7 pagesco_12aswinmithun12No ratings yet
- Event Triggered Optimal Adaptive ControlDocument12 pagesEvent Triggered Optimal Adaptive ControlAlfa ZakiNo ratings yet
- PI Controller Relay Auto-Tuning Using Delay and Phase Margin in PMSM DrivesDocument11 pagesPI Controller Relay Auto-Tuning Using Delay and Phase Margin in PMSM Drivesrizk86No ratings yet
- LFC With High Penetration of Wind Farms - Robust Fuzzy ControllerDocument21 pagesLFC With High Penetration of Wind Farms - Robust Fuzzy ControllerAmar IndraNo ratings yet
- Sjeat 2 (11) 419-427Document9 pagesSjeat 2 (11) 419-427smprabu24317No ratings yet
- Real-Time Aeroservoelastic Analysis of Wind-Turbines by Free Multibody SoftwareDocument18 pagesReal-Time Aeroservoelastic Analysis of Wind-Turbines by Free Multibody SoftwareAbhishek PatilNo ratings yet
- Prediction and Enhancement of Power System Transient Stability Using Taylor SeriesDocument7 pagesPrediction and Enhancement of Power System Transient Stability Using Taylor SeriesOladeji Ifedayo RNo ratings yet
- Acc 2016 7525245Document6 pagesAcc 2016 7525245Nguyễn Văn HoàNo ratings yet
- Been Maintained or Lost Will Remain Stable Once Disturbance Is RemovedDocument3 pagesBeen Maintained or Lost Will Remain Stable Once Disturbance Is Removedez55No ratings yet
- Fuzzy Logic For Single AreaDocument11 pagesFuzzy Logic For Single Areaabata yohannesNo ratings yet
- YarrakDocument7 pagesYarrakhakansangulNo ratings yet
- Constrained Model-Based Predictive Controller For A High-Frequency Low-Power DC-DC Buck ConverterDocument24 pagesConstrained Model-Based Predictive Controller For A High-Frequency Low-Power DC-DC Buck ConverterShaheer DurraniNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Vizio D24hn-G9 Manual enDocument43 pagesVizio D24hn-G9 Manual enkrievkalnsgNo ratings yet
- Retrofitting A Conventional Lathe To A Digital Intelligence SystemDocument9 pagesRetrofitting A Conventional Lathe To A Digital Intelligence SystemEliane AlexandreNo ratings yet
- Fluid Ebike LCD Display: User ManualDocument19 pagesFluid Ebike LCD Display: User ManualSora GamerNo ratings yet
- TM600 A F P R Sechematics - 134Document1 pageTM600 A F P R Sechematics - 134Fabian NoguerolesNo ratings yet
- Extra: Battery Chargers and Expansion ModulesDocument2 pagesExtra: Battery Chargers and Expansion Modulessammy muisyoNo ratings yet
- Stgib10ch60ts LDocument24 pagesStgib10ch60ts LSlavuha SlavuhaNo ratings yet
- Balun 1.6/5.6 (F) To 3 Pole IDC 75/120, 2-8mbit/s Bulkhead MountDocument1 pageBalun 1.6/5.6 (F) To 3 Pole IDC 75/120, 2-8mbit/s Bulkhead MountEhsan RohaniNo ratings yet
- TSM PC05 Datasheet ENDocument2 pagesTSM PC05 Datasheet ENRelu IanoviciNo ratings yet
- Manual Hy-Gain 2795 ENGDocument12 pagesManual Hy-Gain 2795 ENGAnders KarlssonNo ratings yet
- M61260BFP /M61262BFP /M61266FP: PAL/SECAM/NTSC対応TV信号処理Document1 pageM61260BFP /M61262BFP /M61266FP: PAL/SECAM/NTSC対応TV信号処理Ageng Algavita WibowoNo ratings yet
- WEG CFW 11 Variable Speed Drives1Document32 pagesWEG CFW 11 Variable Speed Drives1Marco PosadaNo ratings yet
- DigiIvy Products US 052814Document1 pageDigiIvy Products US 052814akiridino0% (1)
- Instruction Manual: Heater SH-230-4 For SD Dry CabinetsDocument5 pagesInstruction Manual: Heater SH-230-4 For SD Dry CabinetsFélix EnríquezNo ratings yet
- Insulated Conductor System - U10Document24 pagesInsulated Conductor System - U10pavankeeralaNo ratings yet
- Controlador Solo9696Document4 pagesControlador Solo9696cristal cobosNo ratings yet
- Wiring DiagramDocument28 pagesWiring DiagramAbdulSattarNo ratings yet
- Sirona Heliodent Dental X-Ray - Maintenance InstructionDocument16 pagesSirona Heliodent Dental X-Ray - Maintenance InstructionPatricia ReyesNo ratings yet
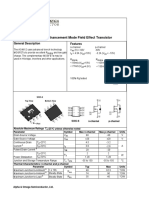
- AO4612 60V Complementary Enhancement Mode Field Effect TransistorDocument9 pagesAO4612 60V Complementary Enhancement Mode Field Effect TransistorAhmad MaufiqNo ratings yet
- Chapter 2 Logic Gates & Boolean AlgebraDocument32 pagesChapter 2 Logic Gates & Boolean AlgebraAmita PalNo ratings yet
- Power Voltage Transformers: A New Solution For Power Systems in The RegionDocument6 pagesPower Voltage Transformers: A New Solution For Power Systems in The RegionkashifNo ratings yet
- 61246904-80 - Plus Remotely Mounted IO Box - R03Document26 pages61246904-80 - Plus Remotely Mounted IO Box - R03juanNo ratings yet
- Electric Properties Notes 2 01042020Document5 pagesElectric Properties Notes 2 01042020Manish Kumar BisoiNo ratings yet
- Industrial Project Report C16129048E Hove Talent TDocument82 pagesIndustrial Project Report C16129048E Hove Talent TTinashe TararaNo ratings yet
- Controller Manual: HomevapDocument8 pagesController Manual: HomevapJózsef DancsiNo ratings yet
- Lecture 19 - FlipFlops IIDocument46 pagesLecture 19 - FlipFlops IIAbdul WahabNo ratings yet
- XTAR Charger Catalog-2020 UpdateDocument5 pagesXTAR Charger Catalog-2020 UpdateIrisNo ratings yet
























































































Download as pdf or txt
You might also like
- DO-260 - MOPS For ADS-B PDFDocument898 pagesDO-260 - MOPS For ADS-B PDFHai AuNo ratings yet
- F120 - F160 Peco ManualDocument44 pagesF120 - F160 Peco ManualBernie WireNo ratings yet
- AAU5613 Product Description: Huawei Technologies Co., LTDDocument11 pagesAAU5613 Product Description: Huawei Technologies Co., LTDRubén FernándezNo ratings yet
- Modularis Service PDFDocument63 pagesModularis Service PDFVictor ZambranoNo ratings yet
- IPMSM Model Predictive Control in Flux-Weakening Operation Using An Improved AlgorithmDocument10 pagesIPMSM Model Predictive Control in Flux-Weakening Operation Using An Improved Algorithmalaref elhajNo ratings yet
- Wa0000 PDFDocument8 pagesWa0000 PDFAlvaajid SaleemNo ratings yet
- Electrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandDocument8 pagesElectrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandNabin AdhikariNo ratings yet
- Adaptive Speed Control For Permanent-Magnet Synchronous Motor System With Variations of Load InertiaDocument10 pagesAdaptive Speed Control For Permanent-Magnet Synchronous Motor System With Variations of Load InertiaRawaz Hama Aziz H.KarimNo ratings yet
- Research ArticleDocument8 pagesResearch Articletariq76No ratings yet
- Model Free DFIGDocument12 pagesModel Free DFIG程崇律No ratings yet
- 2018 - A Comparison of Finite Control Set and Continuous Control Set Model Predictive Control Schemes For Speed Control of Induction MotorsDocument13 pages2018 - A Comparison of Finite Control Set and Continuous Control Set Model Predictive Control Schemes For Speed Control of Induction MotorsjemmyducNo ratings yet
- Optimum Design of Proportional-Integral Controllers in Grid-Integrated PMSG-based Wind Energy Conversion SystemDocument26 pagesOptimum Design of Proportional-Integral Controllers in Grid-Integrated PMSG-based Wind Energy Conversion SystemPriyanka GuptaNo ratings yet
- 10.1007@s42835 019 00256 0Document8 pages10.1007@s42835 019 00256 0anurag savarnNo ratings yet
- Juan Manuel Mauricio 2008Document11 pagesJuan Manuel Mauricio 2008oualid zouggarNo ratings yet
- Valve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodDocument8 pagesValve Controller Design of Multi-Machine Power Systems Based On Adaptive Hamilton Minimax MethodsivaNo ratings yet
- Energies 16 01245Document15 pagesEnergies 16 01245mohammad omarNo ratings yet
- Optimized Load Frequency Control For Single Area Power System Using Linear Quadratic Gaussian Technique and Coefficient Diagram MethodDocument17 pagesOptimized Load Frequency Control For Single Area Power System Using Linear Quadratic Gaussian Technique and Coefficient Diagram Methodاسأل شجر اللوزNo ratings yet
- AGC Dynamic Simulation in PSSEDocument11 pagesAGC Dynamic Simulation in PSSEAmr KamalNo ratings yet
- High Performance Position Control of Permanent Magnet Synchronous DrivesDocument11 pagesHigh Performance Position Control of Permanent Magnet Synchronous DrivesdjoodjooNo ratings yet
- 01 Actuators-10-00147Document16 pages01 Actuators-10-00147fvijayamiNo ratings yet
- Asymptotically Stable Predictive Control of Grid-Connected Converter Based On Discrete Space Vector ModulationDocument11 pagesAsymptotically Stable Predictive Control of Grid-Connected Converter Based On Discrete Space Vector ModulationTulio Ernesto Hernandez RamirezNo ratings yet
- Optimized Field Oriented Control Design by Multi Objective OptimizationDocument7 pagesOptimized Field Oriented Control Design by Multi Objective OptimizationHùng MạnhNo ratings yet
- MPC A Simple and Powerful Method To Control Power ConvertersDocument13 pagesMPC A Simple and Powerful Method To Control Power ConvertersDavidNo ratings yet
- Article 2Document20 pagesArticle 2hafiddjouadi36No ratings yet
- Điều chỉnh tốc độ cho ổ đĩa PMSM dựa trên bộ điều khiển chế độ trượt mớiDocument8 pagesĐiều chỉnh tốc độ cho ổ đĩa PMSM dựa trên bộ điều khiển chế độ trượt mớiNguyễn Văn HoàNo ratings yet
- Identification of Dynamic Equivalents Based On Heuristic Optimization For Smart Grid Applications2012Document8 pagesIdentification of Dynamic Equivalents Based On Heuristic Optimization For Smart Grid Applications2012gabriveragNo ratings yet
- Electronics 10 02080 With CoverDocument37 pagesElectronics 10 02080 With CoverMarcel NicolaNo ratings yet
- Speed Ripple Minimization of Permanent Magnet Synchronous Motor Based On Model Predictive and Iterative Learning ControlsDocument10 pagesSpeed Ripple Minimization of Permanent Magnet Synchronous Motor Based On Model Predictive and Iterative Learning ControlsnhatvpNo ratings yet
- Optimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationDocument6 pagesOptimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationLIEW HUI FANG UNIMAPNo ratings yet
- Optimization of Load Frequency Control of Different Area System Based On Genetic AlgorithmDocument6 pagesOptimization of Load Frequency Control of Different Area System Based On Genetic AlgorithmInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Machine Learning Based Adaptive PredictionDocument9 pagesMachine Learning Based Adaptive PredictionnhatvpNo ratings yet
- IET PE DraftDocument11 pagesIET PE DraftArghya ChakravartyNo ratings yet
- Seamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftDocument11 pagesSeamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftBadal PatnaikNo ratings yet
- SMC DobDocument9 pagesSMC DobNguyễn Văn HoàNo ratings yet
- Research Article: Observer-Based Robust Control For Hydraulic Velocity Control SystemDocument10 pagesResearch Article: Observer-Based Robust Control For Hydraulic Velocity Control SystemNehal ANo ratings yet
- Article 1Document12 pagesArticle 1soroush.atashin93No ratings yet
- PSO Technique Applied To Sensorless Field-Oriented Control PMSM Drive With Discretized RL-fractional IntegralDocument12 pagesPSO Technique Applied To Sensorless Field-Oriented Control PMSM Drive With Discretized RL-fractional IntegralfvijayamiNo ratings yet
- Robotics 12 00105 v2Document16 pagesRobotics 12 00105 v2venkatesh allamNo ratings yet
- Speed Control Design of A PMSM Based On Functional Model Predictive ApproachDocument15 pagesSpeed Control Design of A PMSM Based On Functional Model Predictive Approachhieuhuech1No ratings yet
- An Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveDocument10 pagesAn Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveAbd DawaraNo ratings yet
- Kamal DinDocument11 pagesKamal DinGabriel Herrera GonzalezNo ratings yet
- Computationally Efficient Self Tuning Controller For DC DC Switch Mode Power Converters Based On Partial Update Kalman Filter SingleDocument24 pagesComputationally Efficient Self Tuning Controller For DC DC Switch Mode Power Converters Based On Partial Update Kalman Filter SingleMairaj-ud-din MuftiNo ratings yet
- Continuum Adapative ControlDocument14 pagesContinuum Adapative Controlabdelhamid.ghoul93No ratings yet
- Improved Non-Singular Fast Terminal Sliding Mode Control With Disturbance Observer For PMSM Drives Motor2Document10 pagesImproved Non-Singular Fast Terminal Sliding Mode Control With Disturbance Observer For PMSM Drives Motor2widyadhari.anindyaNo ratings yet
- 1 s2.0 S0378779617303528 MainDocument12 pages1 s2.0 S0378779617303528 MainAmirreza ZarepourNo ratings yet
- Impedance and Stability Analysis of A Permanent Magnet Synchronous Generator System For More Electric AircraftDocument6 pagesImpedance and Stability Analysis of A Permanent Magnet Synchronous Generator System For More Electric AircraftAngel Benites HornaNo ratings yet
- Robust Sliding Mode Control For Robot ManipulatorsDocument10 pagesRobust Sliding Mode Control For Robot Manipulatorshoàng nguyễnNo ratings yet
- Design A Robust Proportional-Derivative Gain-SchedDocument21 pagesDesign A Robust Proportional-Derivative Gain-SchedsNo ratings yet
- Adaptive MPC Current Control-4Document8 pagesAdaptive MPC Current Control-4sainadh saiNo ratings yet
- Zhang 2020Document11 pagesZhang 2020Lê Đức ThịnhNo ratings yet
- co_12Document7 pagesco_12aswinmithun12No ratings yet
- Event Triggered Optimal Adaptive ControlDocument12 pagesEvent Triggered Optimal Adaptive ControlAlfa ZakiNo ratings yet
- PI Controller Relay Auto-Tuning Using Delay and Phase Margin in PMSM DrivesDocument11 pagesPI Controller Relay Auto-Tuning Using Delay and Phase Margin in PMSM Drivesrizk86No ratings yet
- LFC With High Penetration of Wind Farms - Robust Fuzzy ControllerDocument21 pagesLFC With High Penetration of Wind Farms - Robust Fuzzy ControllerAmar IndraNo ratings yet
- Sjeat 2 (11) 419-427Document9 pagesSjeat 2 (11) 419-427smprabu24317No ratings yet
- Real-Time Aeroservoelastic Analysis of Wind-Turbines by Free Multibody SoftwareDocument18 pagesReal-Time Aeroservoelastic Analysis of Wind-Turbines by Free Multibody SoftwareAbhishek PatilNo ratings yet
- Prediction and Enhancement of Power System Transient Stability Using Taylor SeriesDocument7 pagesPrediction and Enhancement of Power System Transient Stability Using Taylor SeriesOladeji Ifedayo RNo ratings yet
- Acc 2016 7525245Document6 pagesAcc 2016 7525245Nguyễn Văn HoàNo ratings yet
- Been Maintained or Lost Will Remain Stable Once Disturbance Is RemovedDocument3 pagesBeen Maintained or Lost Will Remain Stable Once Disturbance Is Removedez55No ratings yet
- Fuzzy Logic For Single AreaDocument11 pagesFuzzy Logic For Single Areaabata yohannesNo ratings yet
- YarrakDocument7 pagesYarrakhakansangulNo ratings yet
- Constrained Model-Based Predictive Controller For A High-Frequency Low-Power DC-DC Buck ConverterDocument24 pagesConstrained Model-Based Predictive Controller For A High-Frequency Low-Power DC-DC Buck ConverterShaheer DurraniNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Vizio D24hn-G9 Manual enDocument43 pagesVizio D24hn-G9 Manual enkrievkalnsgNo ratings yet
- Retrofitting A Conventional Lathe To A Digital Intelligence SystemDocument9 pagesRetrofitting A Conventional Lathe To A Digital Intelligence SystemEliane AlexandreNo ratings yet
- Fluid Ebike LCD Display: User ManualDocument19 pagesFluid Ebike LCD Display: User ManualSora GamerNo ratings yet
- TM600 A F P R Sechematics - 134Document1 pageTM600 A F P R Sechematics - 134Fabian NoguerolesNo ratings yet
- Extra: Battery Chargers and Expansion ModulesDocument2 pagesExtra: Battery Chargers and Expansion Modulessammy muisyoNo ratings yet
- Stgib10ch60ts LDocument24 pagesStgib10ch60ts LSlavuha SlavuhaNo ratings yet
- Balun 1.6/5.6 (F) To 3 Pole IDC 75/120, 2-8mbit/s Bulkhead MountDocument1 pageBalun 1.6/5.6 (F) To 3 Pole IDC 75/120, 2-8mbit/s Bulkhead MountEhsan RohaniNo ratings yet
- TSM PC05 Datasheet ENDocument2 pagesTSM PC05 Datasheet ENRelu IanoviciNo ratings yet
- Manual Hy-Gain 2795 ENGDocument12 pagesManual Hy-Gain 2795 ENGAnders KarlssonNo ratings yet
- M61260BFP /M61262BFP /M61266FP: PAL/SECAM/NTSC対応TV信号処理Document1 pageM61260BFP /M61262BFP /M61266FP: PAL/SECAM/NTSC対応TV信号処理Ageng Algavita WibowoNo ratings yet
- WEG CFW 11 Variable Speed Drives1Document32 pagesWEG CFW 11 Variable Speed Drives1Marco PosadaNo ratings yet
- DigiIvy Products US 052814Document1 pageDigiIvy Products US 052814akiridino0% (1)
- Instruction Manual: Heater SH-230-4 For SD Dry CabinetsDocument5 pagesInstruction Manual: Heater SH-230-4 For SD Dry CabinetsFélix EnríquezNo ratings yet
- Insulated Conductor System - U10Document24 pagesInsulated Conductor System - U10pavankeeralaNo ratings yet
- Controlador Solo9696Document4 pagesControlador Solo9696cristal cobosNo ratings yet
- Wiring DiagramDocument28 pagesWiring DiagramAbdulSattarNo ratings yet
- Sirona Heliodent Dental X-Ray - Maintenance InstructionDocument16 pagesSirona Heliodent Dental X-Ray - Maintenance InstructionPatricia ReyesNo ratings yet
- AO4612 60V Complementary Enhancement Mode Field Effect TransistorDocument9 pagesAO4612 60V Complementary Enhancement Mode Field Effect TransistorAhmad MaufiqNo ratings yet
- Chapter 2 Logic Gates & Boolean AlgebraDocument32 pagesChapter 2 Logic Gates & Boolean AlgebraAmita PalNo ratings yet
- Power Voltage Transformers: A New Solution For Power Systems in The RegionDocument6 pagesPower Voltage Transformers: A New Solution For Power Systems in The RegionkashifNo ratings yet
- 61246904-80 - Plus Remotely Mounted IO Box - R03Document26 pages61246904-80 - Plus Remotely Mounted IO Box - R03juanNo ratings yet
- Electric Properties Notes 2 01042020Document5 pagesElectric Properties Notes 2 01042020Manish Kumar BisoiNo ratings yet
- Industrial Project Report C16129048E Hove Talent TDocument82 pagesIndustrial Project Report C16129048E Hove Talent TTinashe TararaNo ratings yet
- Controller Manual: HomevapDocument8 pagesController Manual: HomevapJózsef DancsiNo ratings yet
- Lecture 19 - FlipFlops IIDocument46 pagesLecture 19 - FlipFlops IIAbdul WahabNo ratings yet
- XTAR Charger Catalog-2020 UpdateDocument5 pagesXTAR Charger Catalog-2020 UpdateIrisNo ratings yet