Download as pdf or txt
You might also like
- Solar Energy by S P Sukhatme PDF Free Download PDFDocument1 pageSolar Energy by S P Sukhatme PDF Free Download PDFUday Suryanarayanaraju10% (10)
- Additional Exercises SolDocument632 pagesAdditional Exercises SolWasimHassanAwan80% (10)
- R.I.P. Dead Words ListDocument3 pagesR.I.P. Dead Words ListTanesha FisherNo ratings yet
- Additional Exercises For Convex OptimizationDocument116 pagesAdditional Exercises For Convex OptimizationQuoc Viet PhamNo ratings yet
- BV Cvxbook Extra Exercises2Document175 pagesBV Cvxbook Extra Exercises2Morokot AngelaNo ratings yet
- ZFPumpen E 08Document22 pagesZFPumpen E 08help3rNo ratings yet
- 9 Complex Integral: 9.1 PathDocument5 pages9 Complex Integral: 9.1 PathAlhassan Ahmed NdatsaragiNo ratings yet
- BÀI TẬP GT LỒIDocument127 pagesBÀI TẬP GT LỒIkhongtinNo ratings yet
- UDL ErrataDocument8 pagesUDL ErrataZongo julienneNo ratings yet
- BV Cvxbook Extra Exercises PDFDocument152 pagesBV Cvxbook Extra Exercises PDFSoumitra BhowmickNo ratings yet
- BV Cvxbook Extra ExercisesDocument117 pagesBV Cvxbook Extra ExercisesAsif AhmedNo ratings yet
- PG 267/ Eg3. Cos (X) DX 2 .: Area Under The Graph of A Nonnegative FunctionDocument11 pagesPG 267/ Eg3. Cos (X) DX 2 .: Area Under The Graph of A Nonnegative Functionaye pyoneNo ratings yet
- Additional Exercises For Convex Optimization PDFDocument187 pagesAdditional Exercises For Convex Optimization PDFCliffordTorresNo ratings yet
- ch5 PDFDocument74 pagesch5 PDFAmit MeenaNo ratings yet
- BVCvxbook Extra ExercisesDocument192 pagesBVCvxbook Extra ExercisesThe DudeNo ratings yet
- 8.indefinite IntegrationPROBLEM SOLVING TACTICSFormulae SheetDocument6 pages8.indefinite IntegrationPROBLEM SOLVING TACTICSFormulae Sheetyodel23957No ratings yet
- Convex OptimizationDocument152 pagesConvex OptimizationnudalaNo ratings yet
- UDL ErrataDocument13 pagesUDL ErrataSantos SeniorNo ratings yet
- MATH2015 Analysis 2, 2009/2010: Contact Details (Semester 2)Document88 pagesMATH2015 Analysis 2, 2009/2010: Contact Details (Semester 2)Tom DavisNo ratings yet
- Integral Calculus PDFDocument32 pagesIntegral Calculus PDFShyam MahendraNo ratings yet
- Aditional Exercises Boyd PDFDocument164 pagesAditional Exercises Boyd PDFlandinluklaNo ratings yet
- Chapter 1 - Fundamental Theorem of Integral CalculusDocument11 pagesChapter 1 - Fundamental Theorem of Integral CalculusCGD ReviewNo ratings yet
- Integration of Function: D DX D DXDocument10 pagesIntegration of Function: D DX D DXYeoh HanNo ratings yet
- Differentiation and It's ApplicationDocument7 pagesDifferentiation and It's ApplicationKirti Ranjan SahooNo ratings yet
- BV Cvxbook Extra ExercisesDocument156 pagesBV Cvxbook Extra ExercisesAnonymous WkbmWCa8MNo ratings yet
- Natural Language Processing: I,, Solemnly Swear That I Was Not Up To No GoodDocument15 pagesNatural Language Processing: I,, Solemnly Swear That I Was Not Up To No GoodBindu K RNo ratings yet
- Computational Methods in The Introductory Courses To Chemical Engineering (KETA01) and Biotechnology (KKKA05)Document24 pagesComputational Methods in The Introductory Courses To Chemical Engineering (KETA01) and Biotechnology (KKKA05)Mphahlele KeletsoNo ratings yet
- Chapter 3 Numerical Integration: in This Chapter, You Will LearnDocument6 pagesChapter 3 Numerical Integration: in This Chapter, You Will LearnArvin 97No ratings yet
- Additional Exercises For Convex Optimization: Stephen Boyd Lieven Vandenberghe March 30, 2012Document143 pagesAdditional Exercises For Convex Optimization: Stephen Boyd Lieven Vandenberghe March 30, 2012api-127299018No ratings yet
- MATH 106: 1 Line IntegralsDocument7 pagesMATH 106: 1 Line IntegralsYa BoyNo ratings yet
- Extra Exercises PDFDocument232 pagesExtra Exercises PDFShy PeachDNo ratings yet
- BV Cvxbook Extra ExercisesDocument139 pagesBV Cvxbook Extra ExercisesAkhil AmritaNo ratings yet
- Computation of Fractional Derivatives of Analytic Functions: Bengt Fornberg Cécile PiretDocument23 pagesComputation of Fractional Derivatives of Analytic Functions: Bengt Fornberg Cécile PiretYousef AlamriNo ratings yet
- Recrangular Pulse FTDocument21 pagesRecrangular Pulse FTSarbagya BuddhacharyaNo ratings yet
- Week 017 Calculus I - Definition of The Definite IntegralDocument7 pagesWeek 017 Calculus I - Definition of The Definite Integralvit.chinnajiginisaNo ratings yet
- Fund THM PDFDocument4 pagesFund THM PDFSuzannePadernaNo ratings yet
- Integration: FXDX FX C S X X N FX Ix X NDocument3 pagesIntegration: FXDX FX C S X X N FX Ix X NSalvadora1No ratings yet
- Mathematics Higher Level Paper 3 - Calculus: Instructions To CandidatesDocument3 pagesMathematics Higher Level Paper 3 - Calculus: Instructions To CandidatesBrian KwonNo ratings yet
- BV Cvxbook Extra ExercisesDocument165 pagesBV Cvxbook Extra ExercisesscatterwalkerNo ratings yet
- fractionalCalculusMinorThesis PDFDocument98 pagesfractionalCalculusMinorThesis PDFWalaa AltamimiNo ratings yet
- Calc 1 Prelim AnswersDocument10 pagesCalc 1 Prelim AnswersNeil MonteroNo ratings yet
- 5 Numerical Differentiation and Integration Newton Cotes IntegrationDocument45 pages5 Numerical Differentiation and Integration Newton Cotes IntegrationEyu KalebNo ratings yet
- EE5121: Convex Optimization: Assignment 5Document2 pagesEE5121: Convex Optimization: Assignment 5elleshNo ratings yet
- Definition Basic Formula and PrinciplesDocument5 pagesDefinition Basic Formula and PrinciplesJhoan Cinco VelardeNo ratings yet
- Sample Midterm: Course Code: Course Title: Time LimitDocument13 pagesSample Midterm: Course Code: Course Title: Time LimitToby ChengNo ratings yet
- Assignment 1Document2 pagesAssignment 1Joyce CruzNo ratings yet
- Lecture 2Document70 pagesLecture 2Ân Dương HoàngNo ratings yet
- SCM Xii Applied Math 202324 Term2Document74 pagesSCM Xii Applied Math 202324 Term2mouseandkeyboardopNo ratings yet
- Class8 LabDocument16 pagesClass8 Labw8cvyxkz4pNo ratings yet
- Lec6 Numerical ModelDocument53 pagesLec6 Numerical ModelNoorLiana MahmudNo ratings yet
- Chapter IV. Complex Integration: IV.1. Riemann-Stieltjes IntegralsDocument8 pagesChapter IV. Complex Integration: IV.1. Riemann-Stieltjes IntegralsTOM DAVISNo ratings yet
- Numerical Integration PDFDocument56 pagesNumerical Integration PDFNi Mesh100% (1)
- Vector Calculus GATE Study Material in PDFDocument9 pagesVector Calculus GATE Study Material in PDFkavinkumareceNo ratings yet
- 137 PP 03Document5 pages137 PP 03Christopher FrancisNo ratings yet
- Vector Calculus GATE Study Material in PDF 1Document10 pagesVector Calculus GATE Study Material in PDF 1nazeeraNo ratings yet
- Integral CalculusDocument22 pagesIntegral CalculusARGHYA MANDALNo ratings yet
- Vector Calculus - GATE Study Material in PDFDocument10 pagesVector Calculus - GATE Study Material in PDFSupriya Santre100% (1)
- Chapter 5. Numerical Integration: Answer Is A Number and Does Not Involve X. Notation Is ConvenientDocument16 pagesChapter 5. Numerical Integration: Answer Is A Number and Does Not Involve X. Notation Is ConvenientMatthew SimeonNo ratings yet
- Chapter 5. Numerical Integration: Answer Is A Number and Does Not Involve X. Notation Is ConvenientDocument16 pagesChapter 5. Numerical Integration: Answer Is A Number and Does Not Involve X. Notation Is Convenientdnes9999No ratings yet
- Definite IntegrationDocument41 pagesDefinite Integrationxyz abcNo ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Department of Mathematics Indian Institute of Technology, BombayDocument8 pagesDepartment of Mathematics Indian Institute of Technology, BombayVidushi VinodNo ratings yet
- Hyundai Hd2600 Hd3100 TurningcenterDocument36 pagesHyundai Hd2600 Hd3100 TurningcenterNoora Abd El MawgoodNo ratings yet
- Log B109KKK WVWZZZ3CZ8P131017 228000km 141672miDocument8 pagesLog B109KKK WVWZZZ3CZ8P131017 228000km 141672miBogdan NicaNo ratings yet
- Xps Deltasigma DacDocument22 pagesXps Deltasigma DacinfosrigNo ratings yet
- Advance Soil MechanicsDocument105 pagesAdvance Soil MechanicsMichael Assefa100% (1)
- 1.1 ARL Ispark BrochureDocument12 pages1.1 ARL Ispark BrochureTUXEDO TVNo ratings yet
- Module 1: Routing Concepts: Switching, Routing, and Wireless Essentials v7.0 (SRWE)Document26 pagesModule 1: Routing Concepts: Switching, Routing, and Wireless Essentials v7.0 (SRWE)Richard CheccaNo ratings yet
- Project STA108Document25 pagesProject STA108meliszaNo ratings yet
- Tele-ECG Monitoring System: Guide Mr.E.Konguvel Dhiwahar C V Arun Kumar S Raman GDocument14 pagesTele-ECG Monitoring System: Guide Mr.E.Konguvel Dhiwahar C V Arun Kumar S Raman Gdhiwahar cvNo ratings yet
- Petcab Research PaperDocument53 pagesPetcab Research PaperSam GonzalesNo ratings yet
- Conductors: NCERT Notes For Class 12 Chemistry Chapter 3: ElectrochemistryDocument12 pagesConductors: NCERT Notes For Class 12 Chemistry Chapter 3: ElectrochemistryDev Printing SolutionNo ratings yet
- Unit 6 ColumnsDocument55 pagesUnit 6 ColumnsSantosh KulkarniNo ratings yet
- Mechanical RegulatorDocument12 pagesMechanical Regulatorshashi chauguleNo ratings yet
- Loop Programming Exercises and Solutions in C - CodeforwinDocument2 pagesLoop Programming Exercises and Solutions in C - CodeforwinyibewodNo ratings yet
- A Tree in The Field Is Equidistant From The Point Line On Which The Tree Stands.Document21 pagesA Tree in The Field Is Equidistant From The Point Line On Which The Tree Stands.Mohamed Fouad KorraNo ratings yet
- GPT Au480Document1 pageGPT Au480xuanhungyteNo ratings yet
- GL 117Document14 pagesGL 117Luiz CarlosNo ratings yet
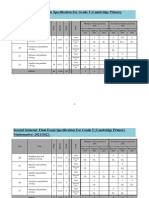
- Grade 5 Specifications CambridgeDocument2 pagesGrade 5 Specifications CambridgekatyaNo ratings yet
- Exp SC 7 - Chapter 05Document16 pagesExp SC 7 - Chapter 05megamind publicationNo ratings yet
- AJAX & PHP Question BankDocument18 pagesAJAX & PHP Question Bankaryansuthar194No ratings yet
- Act Design GuideDocument49 pagesAct Design GuideRodney LeamanNo ratings yet
- D 395 - 02 - RDM5NS0WMG - PDFDocument6 pagesD 395 - 02 - RDM5NS0WMG - PDFAndré BerninzonNo ratings yet
- GeothermalDocument52 pagesGeothermalJoshi ChumbaleNo ratings yet
- 05 Seat and o Ring TemperatureDocument1 page05 Seat and o Ring TemperatureAndri AjaNo ratings yet
- Business AnalyticsDocument8 pagesBusiness Analyticsssssstt62201450% (2)
- Sa2 3rd MathsDocument5 pagesSa2 3rd Mathsrunit waykarNo ratings yet
- Ave Verum CorpusDocument21 pagesAve Verum Corpuslmax53100% (1)