
Geometrical Constraint
Geometrical Constraint
You might also like
- Mechanisms Chap 10 - Determining The Cam Profile - Graphical Method212Document27 pagesMechanisms Chap 10 - Determining The Cam Profile - Graphical Method212劉德信No ratings yet
- 7.1. Blowing Wheel, Infeed/Discharge Starwheel: Contiform Mechanical AdjustmentsDocument22 pages7.1. Blowing Wheel, Infeed/Discharge Starwheel: Contiform Mechanical AdjustmentsJoel Coaguila CosiNo ratings yet
- Bearing Dynamic Coefficients of Flexible Pad Journal Bearings LinkedDocument8 pagesBearing Dynamic Coefficients of Flexible Pad Journal Bearings LinkedBa1313yNo ratings yet
- PTP 820 Technical Training - Appendix Antenna Alignment - CambiumDocument34 pagesPTP 820 Technical Training - Appendix Antenna Alignment - CambiumJuan PerezNo ratings yet
- By Sijal Ahmed: Turbomachinery Modelling in FluentDocument20 pagesBy Sijal Ahmed: Turbomachinery Modelling in FluentArun Gupta100% (1)
- By Sijal Ahmed: Turbomachinery Modelling in FluentDocument20 pagesBy Sijal Ahmed: Turbomachinery Modelling in FluentPavan Kumãr GannevaramNo ratings yet
- Dynamic Positioning SensorsDocument24 pagesDynamic Positioning Sensorskhaled dawood100% (1)
- Piezo - Nano - PositioningDocument18 pagesPiezo - Nano - PositioningKaren SuttonNo ratings yet
- Gears: Ken Youssefi Mechanical Engineering DeptDocument19 pagesGears: Ken Youssefi Mechanical Engineering DeptRyan Llona FernandezNo ratings yet
- Gears: Mechanical Engineering Dept. Ken YoussefiDocument19 pagesGears: Mechanical Engineering Dept. Ken YoussefiZahir KhiraNo ratings yet
- Prof. Devang A Patel Mechanism Engineering Department SVIT VasadDocument24 pagesProf. Devang A Patel Mechanism Engineering Department SVIT VasadPavan Gandhi100% (1)
- Geometric Aspects of RSDocument30 pagesGeometric Aspects of RSAkonir AspradaNo ratings yet
- 1 Gears Types - ADocument17 pages1 Gears Types - AnethmiNo ratings yet
- Prob 09-49Document1 pageProb 09-49megullNo ratings yet
- Results 2. Enter Dimensions 1. Mount Masterlign and Switch OnDocument2 pagesResults 2. Enter Dimensions 1. Mount Masterlign and Switch OnFany HerlinaNo ratings yet
- Applications: Called The Follower. The Follower Executes Movement in A Pre-SpecifiedDocument5 pagesApplications: Called The Follower. The Follower Executes Movement in A Pre-SpecifiedPrajeesh KTNo ratings yet
- Lecture 20 Seismic Processing and InterpretationDocument22 pagesLecture 20 Seismic Processing and InterpretationMartin NguyenNo ratings yet
- Curso Ut Pa - Parte 3 - HellierDocument19 pagesCurso Ut Pa - Parte 3 - HellierIvan RomeroNo ratings yet
- Gears KinematicsDocument19 pagesGears Kinematicsavinashn12No ratings yet
- 2011.05.06 APSG25 Bergstrom SurveyQualityConsiderations-APSG-20110506 PDFDocument25 pages2011.05.06 APSG25 Bergstrom SurveyQualityConsiderations-APSG-20110506 PDFqaiser73_pkNo ratings yet
- TOM Cam & FollowerDocument19 pagesTOM Cam & FollowerRAHUL SOLANKENo ratings yet
- Offshore Support Structures & Installation: Technology of Offshore Wind EnergyDocument15 pagesOffshore Support Structures & Installation: Technology of Offshore Wind EnergymilangrfNo ratings yet
- Gears: Mechanical Engineering DeptDocument20 pagesGears: Mechanical Engineering DeptAtikah AbdallaNo ratings yet
- Lecture 07 BearingsDocument27 pagesLecture 07 BearingskINGNo ratings yet
- 7 Gear KinematikDocument19 pages7 Gear KinematikiwenNo ratings yet
- Model 1700 Training Activity TwoDocument12 pagesModel 1700 Training Activity Twoyao nestorNo ratings yet
- Parabola Notes HNDocument158 pagesParabola Notes HNadityavaish739No ratings yet
- HCO Oriented Core ProceduresDocument36 pagesHCO Oriented Core ProceduresNick Bryce100% (1)
- Lecture 102 Particle-Rectilinear Motion (Kinematics)Document5 pagesLecture 102 Particle-Rectilinear Motion (Kinematics)Checcu PjanicNo ratings yet
- Prosthetic Alignment of TTDocument11 pagesProsthetic Alignment of TTanjelikaNo ratings yet
- Jhabua Power Limited: Document No. Issue No/Date Revision No/DateDocument2 pagesJhabua Power Limited: Document No. Issue No/Date Revision No/DatebhaskarNo ratings yet
- Radio NavigationDocument453 pagesRadio NavigationAkashNo ratings yet
- Tritech - ERECTION AND MAINTENANCE MANUAL FOR 33kV - 245kVDocument9 pagesTritech - ERECTION AND MAINTENANCE MANUAL FOR 33kV - 245kVsarat sahooNo ratings yet
- Gear Modifications WindDocument11 pagesGear Modifications Windcosta59dac9242No ratings yet
- Base Pitch Tables: Williiam L, J!Anninck Ilinco'Lnwood - LLLDocument4 pagesBase Pitch Tables: Williiam L, J!Anninck Ilinco'Lnwood - LLL2800xpcNo ratings yet
- 22 Tacheometric SurveyingDocument28 pages22 Tacheometric SurveyingEma50% (2)
- Spatial Parallel RobotDocument12 pagesSpatial Parallel RobotManish VermaNo ratings yet
- Thickweb SwitchDocument6 pagesThickweb Switchsai kishore pedadaNo ratings yet
- Fdocuments - in Chapter 3 Satellite Subsystems 1Document20 pagesFdocuments - in Chapter 3 Satellite Subsystems 1RahulMondolNo ratings yet
- D-06 Pilot CardDocument2 pagesD-06 Pilot Cardchas-33No ratings yet
- Nasa Tech Memo 106943Document30 pagesNasa Tech Memo 106943King1971No ratings yet
- Week 11 12 Design of Control System Using Root Locus Revised May 20 2013Document51 pagesWeek 11 12 Design of Control System Using Root Locus Revised May 20 2013biruk1No ratings yet
- Lining of Track : Anurag RastogiDocument100 pagesLining of Track : Anurag RastogitejeswarNo ratings yet
- Combi-Gyro Wall Tube-Hat Vol-2 Construction Ver010en01Document20 pagesCombi-Gyro Wall Tube-Hat Vol-2 Construction Ver010en01Ma. Charisse MacaraegNo ratings yet
- GenesysAerosystems System20-30 DataSheetDocument2 pagesGenesysAerosystems System20-30 DataSheetzachNo ratings yet
- Tutorial Pix4dDocument33 pagesTutorial Pix4dMrosas1122No ratings yet
- Especificaciones Tecnicas Scorbot ER-9Document2 pagesEspecificaciones Tecnicas Scorbot ER-9Carlos Andres Moya ErazoNo ratings yet
- Chapter 2-CDocument78 pagesChapter 2-CAxel RiveraNo ratings yet
- Jaa PPL - Radio Navigation PDFDocument488 pagesJaa PPL - Radio Navigation PDFjavaldera100% (1)
- DELMIA - About Motion TypesDocument5 pagesDELMIA - About Motion Typeszhaodong.liangNo ratings yet
- HCO Oriented Core ProceduresDocument27 pagesHCO Oriented Core Proceduressaz08100% (1)
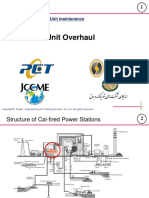
- Turbine Unit Overhaul - English PPDocument38 pagesTurbine Unit Overhaul - English PPsaeedNo ratings yet
- Rotor Dynamics Without Equations - NelsonDocument9 pagesRotor Dynamics Without Equations - NelsonItalo LinsNo ratings yet
- Controllable Pitch Propeller (CPP) Vs Fixed Pitch Propeller (FPP)Document15 pagesControllable Pitch Propeller (CPP) Vs Fixed Pitch Propeller (FPP)Sidney BezerraNo ratings yet
- Directional Drilling Overview: Andy de VerteuilDocument76 pagesDirectional Drilling Overview: Andy de VerteuilMohamed Ahmed AlyNo ratings yet
- 10 1 1 80 2969 PDFDocument6 pages10 1 1 80 2969 PDFAbdulGhaffarNo ratings yet
- On the Cohomology of Certain Non-Compact Shimura Varieties (AM-173)From EverandOn the Cohomology of Certain Non-Compact Shimura Varieties (AM-173)No ratings yet
- The Hilbert Transform of Schwartz Distributions and ApplicationsFrom EverandThe Hilbert Transform of Schwartz Distributions and ApplicationsNo ratings yet
























































Download as pdf or txt
You might also like
- Mechanisms Chap 10 - Determining The Cam Profile - Graphical Method212Document27 pagesMechanisms Chap 10 - Determining The Cam Profile - Graphical Method212劉德信No ratings yet
- 7.1. Blowing Wheel, Infeed/Discharge Starwheel: Contiform Mechanical AdjustmentsDocument22 pages7.1. Blowing Wheel, Infeed/Discharge Starwheel: Contiform Mechanical AdjustmentsJoel Coaguila CosiNo ratings yet
- Bearing Dynamic Coefficients of Flexible Pad Journal Bearings LinkedDocument8 pagesBearing Dynamic Coefficients of Flexible Pad Journal Bearings LinkedBa1313yNo ratings yet
- PTP 820 Technical Training - Appendix Antenna Alignment - CambiumDocument34 pagesPTP 820 Technical Training - Appendix Antenna Alignment - CambiumJuan PerezNo ratings yet
- By Sijal Ahmed: Turbomachinery Modelling in FluentDocument20 pagesBy Sijal Ahmed: Turbomachinery Modelling in FluentArun Gupta100% (1)
- By Sijal Ahmed: Turbomachinery Modelling in FluentDocument20 pagesBy Sijal Ahmed: Turbomachinery Modelling in FluentPavan Kumãr GannevaramNo ratings yet
- Dynamic Positioning SensorsDocument24 pagesDynamic Positioning Sensorskhaled dawood100% (1)
- Piezo - Nano - PositioningDocument18 pagesPiezo - Nano - PositioningKaren SuttonNo ratings yet
- Gears: Ken Youssefi Mechanical Engineering DeptDocument19 pagesGears: Ken Youssefi Mechanical Engineering DeptRyan Llona FernandezNo ratings yet
- Gears: Mechanical Engineering Dept. Ken YoussefiDocument19 pagesGears: Mechanical Engineering Dept. Ken YoussefiZahir KhiraNo ratings yet
- Prof. Devang A Patel Mechanism Engineering Department SVIT VasadDocument24 pagesProf. Devang A Patel Mechanism Engineering Department SVIT VasadPavan Gandhi100% (1)
- Geometric Aspects of RSDocument30 pagesGeometric Aspects of RSAkonir AspradaNo ratings yet
- 1 Gears Types - ADocument17 pages1 Gears Types - AnethmiNo ratings yet
- Prob 09-49Document1 pageProb 09-49megullNo ratings yet
- Results 2. Enter Dimensions 1. Mount Masterlign and Switch OnDocument2 pagesResults 2. Enter Dimensions 1. Mount Masterlign and Switch OnFany HerlinaNo ratings yet
- Applications: Called The Follower. The Follower Executes Movement in A Pre-SpecifiedDocument5 pagesApplications: Called The Follower. The Follower Executes Movement in A Pre-SpecifiedPrajeesh KTNo ratings yet
- Lecture 20 Seismic Processing and InterpretationDocument22 pagesLecture 20 Seismic Processing and InterpretationMartin NguyenNo ratings yet
- Curso Ut Pa - Parte 3 - HellierDocument19 pagesCurso Ut Pa - Parte 3 - HellierIvan RomeroNo ratings yet
- Gears KinematicsDocument19 pagesGears Kinematicsavinashn12No ratings yet
- 2011.05.06 APSG25 Bergstrom SurveyQualityConsiderations-APSG-20110506 PDFDocument25 pages2011.05.06 APSG25 Bergstrom SurveyQualityConsiderations-APSG-20110506 PDFqaiser73_pkNo ratings yet
- TOM Cam & FollowerDocument19 pagesTOM Cam & FollowerRAHUL SOLANKENo ratings yet
- Offshore Support Structures & Installation: Technology of Offshore Wind EnergyDocument15 pagesOffshore Support Structures & Installation: Technology of Offshore Wind EnergymilangrfNo ratings yet
- Gears: Mechanical Engineering DeptDocument20 pagesGears: Mechanical Engineering DeptAtikah AbdallaNo ratings yet
- Lecture 07 BearingsDocument27 pagesLecture 07 BearingskINGNo ratings yet
- 7 Gear KinematikDocument19 pages7 Gear KinematikiwenNo ratings yet
- Model 1700 Training Activity TwoDocument12 pagesModel 1700 Training Activity Twoyao nestorNo ratings yet
- Parabola Notes HNDocument158 pagesParabola Notes HNadityavaish739No ratings yet
- HCO Oriented Core ProceduresDocument36 pagesHCO Oriented Core ProceduresNick Bryce100% (1)
- Lecture 102 Particle-Rectilinear Motion (Kinematics)Document5 pagesLecture 102 Particle-Rectilinear Motion (Kinematics)Checcu PjanicNo ratings yet
- Prosthetic Alignment of TTDocument11 pagesProsthetic Alignment of TTanjelikaNo ratings yet
- Jhabua Power Limited: Document No. Issue No/Date Revision No/DateDocument2 pagesJhabua Power Limited: Document No. Issue No/Date Revision No/DatebhaskarNo ratings yet
- Radio NavigationDocument453 pagesRadio NavigationAkashNo ratings yet
- Tritech - ERECTION AND MAINTENANCE MANUAL FOR 33kV - 245kVDocument9 pagesTritech - ERECTION AND MAINTENANCE MANUAL FOR 33kV - 245kVsarat sahooNo ratings yet
- Gear Modifications WindDocument11 pagesGear Modifications Windcosta59dac9242No ratings yet
- Base Pitch Tables: Williiam L, J!Anninck Ilinco'Lnwood - LLLDocument4 pagesBase Pitch Tables: Williiam L, J!Anninck Ilinco'Lnwood - LLL2800xpcNo ratings yet
- 22 Tacheometric SurveyingDocument28 pages22 Tacheometric SurveyingEma50% (2)
- Spatial Parallel RobotDocument12 pagesSpatial Parallel RobotManish VermaNo ratings yet
- Thickweb SwitchDocument6 pagesThickweb Switchsai kishore pedadaNo ratings yet
- Fdocuments - in Chapter 3 Satellite Subsystems 1Document20 pagesFdocuments - in Chapter 3 Satellite Subsystems 1RahulMondolNo ratings yet
- D-06 Pilot CardDocument2 pagesD-06 Pilot Cardchas-33No ratings yet
- Nasa Tech Memo 106943Document30 pagesNasa Tech Memo 106943King1971No ratings yet
- Week 11 12 Design of Control System Using Root Locus Revised May 20 2013Document51 pagesWeek 11 12 Design of Control System Using Root Locus Revised May 20 2013biruk1No ratings yet
- Lining of Track : Anurag RastogiDocument100 pagesLining of Track : Anurag RastogitejeswarNo ratings yet
- Combi-Gyro Wall Tube-Hat Vol-2 Construction Ver010en01Document20 pagesCombi-Gyro Wall Tube-Hat Vol-2 Construction Ver010en01Ma. Charisse MacaraegNo ratings yet
- GenesysAerosystems System20-30 DataSheetDocument2 pagesGenesysAerosystems System20-30 DataSheetzachNo ratings yet
- Tutorial Pix4dDocument33 pagesTutorial Pix4dMrosas1122No ratings yet
- Especificaciones Tecnicas Scorbot ER-9Document2 pagesEspecificaciones Tecnicas Scorbot ER-9Carlos Andres Moya ErazoNo ratings yet
- Chapter 2-CDocument78 pagesChapter 2-CAxel RiveraNo ratings yet
- Jaa PPL - Radio Navigation PDFDocument488 pagesJaa PPL - Radio Navigation PDFjavaldera100% (1)
- DELMIA - About Motion TypesDocument5 pagesDELMIA - About Motion Typeszhaodong.liangNo ratings yet
- HCO Oriented Core ProceduresDocument27 pagesHCO Oriented Core Proceduressaz08100% (1)
- Turbine Unit Overhaul - English PPDocument38 pagesTurbine Unit Overhaul - English PPsaeedNo ratings yet
- Rotor Dynamics Without Equations - NelsonDocument9 pagesRotor Dynamics Without Equations - NelsonItalo LinsNo ratings yet
- Controllable Pitch Propeller (CPP) Vs Fixed Pitch Propeller (FPP)Document15 pagesControllable Pitch Propeller (CPP) Vs Fixed Pitch Propeller (FPP)Sidney BezerraNo ratings yet
- Directional Drilling Overview: Andy de VerteuilDocument76 pagesDirectional Drilling Overview: Andy de VerteuilMohamed Ahmed AlyNo ratings yet
- 10 1 1 80 2969 PDFDocument6 pages10 1 1 80 2969 PDFAbdulGhaffarNo ratings yet
- On the Cohomology of Certain Non-Compact Shimura Varieties (AM-173)From EverandOn the Cohomology of Certain Non-Compact Shimura Varieties (AM-173)No ratings yet
- The Hilbert Transform of Schwartz Distributions and ApplicationsFrom EverandThe Hilbert Transform of Schwartz Distributions and ApplicationsNo ratings yet