Download as pdf or txt
You might also like
- 1978 HR Owner's ManualDocument36 pages1978 HR Owner's Manualpinkprincess38450% (2)
- 9852 1007 01j Maintenance Instructions COP 1840,1840EXDocument32 pages9852 1007 01j Maintenance Instructions COP 1840,1840EXrolandNo ratings yet
- Kelpro Oil Seal GuideDocument316 pagesKelpro Oil Seal GuideAdam White75% (4)
- Tamburello PDF Version 2.8 Aug-2014Document142 pagesTamburello PDF Version 2.8 Aug-2014Benjamin Chilano100% (2)
- Specifications & Service DataDocument66 pagesSpecifications & Service DataJorge Barradas Osorno100% (1)
- Safety Analysis For Electrical Power Steering (EPS)Document7 pagesSafety Analysis For Electrical Power Steering (EPS)acmilan4eva1899No ratings yet
- Report Body AccDocument24 pagesReport Body Accsamruddhi zemseNo ratings yet
- Cruise Control Operation From Zero To Preset Speed-Simulation and ImplementationDocument6 pagesCruise Control Operation From Zero To Preset Speed-Simulation and ImplementationVijay KulkarniNo ratings yet
- Electrical - Ijeee-Electronic Steerin of Automobiles SaranyaDocument8 pagesElectrical - Ijeee-Electronic Steerin of Automobiles Saranyaiaset123No ratings yet
- Bala Subramanian 2015Document8 pagesBala Subramanian 2015yourspajjuNo ratings yet
- This Content Downloaded From 85.201.166.128 On Sun, 03 Oct 2021 00:03:52 UTCDocument11 pagesThis Content Downloaded From 85.201.166.128 On Sun, 03 Oct 2021 00:03:52 UTCNguyễn Trường GiangNo ratings yet
- An Adaptive Cruise Control System For AutonomousDocument8 pagesAn Adaptive Cruise Control System For Autonomous20145327No ratings yet
- System Description - Lane Change Assist (Audi Side Assist)Document10 pagesSystem Description - Lane Change Assist (Audi Side Assist)ergdegNo ratings yet
- Jurnal TeknologiDocument7 pagesJurnal TeknologiKhor ChingNo ratings yet
- Adaptive Cruise Control System Using Fuzzy Logic: M Abdelwahab, M Abdelaziz, N.ElnahasDocument3 pagesAdaptive Cruise Control System Using Fuzzy Logic: M Abdelwahab, M Abdelaziz, N.ElnahasMcmimi91No ratings yet
- Development of Steering Control System For Autonomous Vehicle Using Geometry-Based Path Tracking AlgorithmDocument9 pagesDevelopment of Steering Control System For Autonomous Vehicle Using Geometry-Based Path Tracking AlgorithmMarie Christine laznikNo ratings yet
- Introduction SwapnilDocument31 pagesIntroduction SwapnilSWAPNIL MAKHARENo ratings yet
- CPC Module 1 Session 2Document90 pagesCPC Module 1 Session 2Tigg CNo ratings yet
- Managing Driving Disturbances in Lateral Vehicle Dynamics Via Adaptive Integrated Chassis ControlDocument12 pagesManaging Driving Disturbances in Lateral Vehicle Dynamics Via Adaptive Integrated Chassis Controlsamsaptak ghoshNo ratings yet
- E3sconf Vesep2020 01037Document10 pagesE3sconf Vesep2020 01037khain469No ratings yet
- Embedded System in Automobile Gec TalakalDocument15 pagesEmbedded System in Automobile Gec TalakalGangadharNo ratings yet
- Accident Prevention System For Public Transport Vehicles: Tejaswini Gunjal, A. D. BhoiDocument4 pagesAccident Prevention System For Public Transport Vehicles: Tejaswini Gunjal, A. D. BhoiHARIHARAN NNo ratings yet
- Optimized Robust Cruise Control System For An Electric VehicleDocument9 pagesOptimized Robust Cruise Control System For An Electric VehicleMuhammad Aseer KhanNo ratings yet
- 1 Basic Components of A Control System: Chapter 1. IntroductionDocument4 pages1 Basic Components of A Control System: Chapter 1. IntroductionShiva HarshNo ratings yet
- Technical Seminar ManDocument13 pagesTechnical Seminar ManShashank SNo ratings yet
- A Review On Driving Control Issues For Smart Electric VehiclesDocument33 pagesA Review On Driving Control Issues For Smart Electric Vehicleslikitha R GowdaNo ratings yet
- Path Planning and Control For Evasive Steering AssistDocument6 pagesPath Planning and Control For Evasive Steering Assistvishal kumarNo ratings yet
- Intelligent Braking System For Automobiles: International Research Journal of Engineering and Technology (IRJET)Document3 pagesIntelligent Braking System For Automobiles: International Research Journal of Engineering and Technology (IRJET)Debabrata kumar DeyNo ratings yet
- A Semi-Automated Parallel Parking System For Passenger Cars: J PohlDocument13 pagesA Semi-Automated Parallel Parking System For Passenger Cars: J PohlAlexandru IlincaNo ratings yet
- 978 3 319 09840 1 - 20 1Document24 pages978 3 319 09840 1 - 20 1mohamad1010No ratings yet
- Intelligent Reverse Braking System by Using Artificial Neutral NetworksDocument3 pagesIntelligent Reverse Braking System by Using Artificial Neutral NetworksarvindalfieguptaNo ratings yet
- Electronic Power Assist Steering (EPAS) SystemDocument21 pagesElectronic Power Assist Steering (EPAS) SystemCamilo RamosNo ratings yet
- Vol7 No2Document5 pagesVol7 No2pptzztppNo ratings yet
- Automatic Pneumatic Bumper and Braking: Abstract-The Aim of This Project Is To Style and DevelopDocument3 pagesAutomatic Pneumatic Bumper and Braking: Abstract-The Aim of This Project Is To Style and DevelopPrashanthNo ratings yet
- Traction Control For BikeDocument10 pagesTraction Control For BikeSachin KumarNo ratings yet
- E30a PDFDocument5 pagesE30a PDFVamshi HotkerNo ratings yet
- Ijfeat: Review Paper On Magic Body Control SuspensionDocument4 pagesIjfeat: Review Paper On Magic Body Control SuspensionTech DudeNo ratings yet
- Audi Dynamic Steering PDFDocument34 pagesAudi Dynamic Steering PDFJOHNNY5377100% (1)
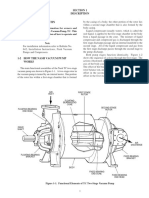
- Section OneDocument12 pagesSection Onechika AaronNo ratings yet
- Mehakdeep Report FinalDocument6 pagesMehakdeep Report FinalMehakdeep Singh ChhinaNo ratings yet
- Interlligent Braking SystemDocument45 pagesInterlligent Braking Systemchutturu mukeshNo ratings yet
- Electro Magnetic Braking SystemDocument45 pagesElectro Magnetic Braking Systemchutturu mukeshNo ratings yet
- Control Systems Project Report (180501008) (180501016) (180501018) (180501020)Document19 pagesControl Systems Project Report (180501008) (180501016) (180501018) (180501020)Shahzaib Anwar OffNo ratings yet
- AEEDA501 - Repairing Vehicle Drive Assistance SystemsDocument86 pagesAEEDA501 - Repairing Vehicle Drive Assistance SystemsTUYIRINGIRE JeromeNo ratings yet
- Review Article: A Review of Active Yaw Control System For Vehicle Handling and Stability EnhancementDocument16 pagesReview Article: A Review of Active Yaw Control System For Vehicle Handling and Stability EnhancementBHAVNA AGARWALNo ratings yet
- Powerpoint Presentation : Topic:-Servomechanism and Control SystemsDocument13 pagesPowerpoint Presentation : Topic:-Servomechanism and Control SystemsAhsan MalikNo ratings yet
- Adaptive Car Control System Based On A PredictiveDocument13 pagesAdaptive Car Control System Based On A Predictiveuzainab460No ratings yet
- Main Project ReportDocument18 pagesMain Project ReportAbhishek Sai AbhiNo ratings yet
- A New Control Strategy of An Electric Power Assisted Steering SystemDocument13 pagesA New Control Strategy of An Electric Power Assisted Steering SystemHariz DanialNo ratings yet
- Road Safety: Vehicle Speed Limiting System: Abstract - Car Accidents Are A Serious Issue in OurDocument3 pagesRoad Safety: Vehicle Speed Limiting System: Abstract - Car Accidents Are A Serious Issue in OurHanzo HenshiNo ratings yet
- Underwater ROV Control SystemDocument20 pagesUnderwater ROV Control SystemPhanNamNo ratings yet
- P1301 1306Document6 pagesP1301 1306Surendar AWESOMENo ratings yet
- Underwater ROV Control SystemDocument11 pagesUnderwater ROV Control SystemIain McCulloch100% (1)
- Advanced Driver Assistance Systems - Past, Present and FutureDocument11 pagesAdvanced Driver Assistance Systems - Past, Present and FuturededdyhpNo ratings yet
- IJSRET_V8_issue1_119Document4 pagesIJSRET_V8_issue1_119Alfonce Edwards OtienoNo ratings yet
- ACC Final ReportDocument13 pagesACC Final ReportDeVvrat Akheriya100% (2)
- Unit v Me3791 Mts & Iot Qb With AnswerDocument9 pagesUnit v Me3791 Mts & Iot Qb With AnswerkathirvelNo ratings yet
- Ce AssigmentDocument22 pagesCe Assigmentmehwish mirzaNo ratings yet
- Launch ControlDocument11 pagesLaunch ControlJohn ByroNo ratings yet
- The Design of A Controller For The Steer-by-Wire System: Key WordsDocument12 pagesThe Design of A Controller For The Steer-by-Wire System: Key WordsdashNo ratings yet
- 02 Redbull Driver in The Loop Motionplatform PaperDocument6 pages02 Redbull Driver in The Loop Motionplatform Paperxi_felNo ratings yet
- 1.1 Heart Rate MeasurementDocument27 pages1.1 Heart Rate MeasurementIndupriya selvamNo ratings yet
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- Lane Departure SpeedDocument8 pagesLane Departure SpeedEnkhbaatar TumenjargalNo ratings yet
- SAFE-Safe Automotive Software ArchitectureDocument36 pagesSAFE-Safe Automotive Software ArchitectureEnkhbaatar TumenjargalNo ratings yet
- At89c51cc01 PA51ccbd AdaperDocument1 pageAt89c51cc01 PA51ccbd AdaperEnkhbaatar TumenjargalNo ratings yet
- Enplas QFP Adapter ConnectionDocument4 pagesEnplas QFP Adapter ConnectionEnkhbaatar TumenjargalNo ratings yet
- AT89STK 06 Software Demonstration CANDocument18 pagesAT89STK 06 Software Demonstration CANEnkhbaatar TumenjargalNo ratings yet
- CAN AT89C51 ErrataDocument12 pagesCAN AT89C51 ErrataEnkhbaatar TumenjargalNo ratings yet
- CAN AT89C51 KitDocument23 pagesCAN AT89C51 KitEnkhbaatar TumenjargalNo ratings yet
- ISOBUS Data Dictionary 20240310Document572 pagesISOBUS Data Dictionary 20240310Enkhbaatar TumenjargalNo ratings yet
- General Body Repairs InteriorDocument264 pagesGeneral Body Repairs InteriorcloscaNo ratings yet
- CSMS Solutions Brief v4Document2 pagesCSMS Solutions Brief v4Ehsan ArbabtaftiNo ratings yet
- Folleto 500qe Series DMDocument2 pagesFolleto 500qe Series DMklimpamericasaguaNo ratings yet
- Maintenance ManualDocument10 pagesMaintenance ManualAbo MohammedNo ratings yet
- Roadtec SX 5 Stabilizer Reclaimer BrochureDocument12 pagesRoadtec SX 5 Stabilizer Reclaimer BrochureashutoshpathakcivilNo ratings yet
- Teikin Catalog Vol 18-Automotive IsuzuDocument28 pagesTeikin Catalog Vol 18-Automotive IsuzuIMED HAMMOUDANo ratings yet
- Owner'S Manual: Read This Manual CarefullyDocument216 pagesOwner'S Manual: Read This Manual CarefullySzabolcs MártonNo ratings yet
- QA.55b OJT Initial Licence Practical Training - Iss 01Document33 pagesQA.55b OJT Initial Licence Practical Training - Iss 01soufiane jouadiNo ratings yet
- Isuzu TFR/S Immobilizer System: Workshop ManualDocument35 pagesIsuzu TFR/S Immobilizer System: Workshop ManualSarayut SrikunNo ratings yet
- Serie X50M PDFDocument244 pagesSerie X50M PDFAndrei MihaiNo ratings yet
- Company Presentation NewDocument13 pagesCompany Presentation NewNaveen PradeepanNo ratings yet
- Tender - Technical Specifications & Appendix - A To FDocument19 pagesTender - Technical Specifications & Appendix - A To FpeyockNo ratings yet
- Diesel Air Intake and Exhaust SystemDocument126 pagesDiesel Air Intake and Exhaust SystemGigi Duru100% (3)
- Exhy20 Eng 1Document13 pagesExhy20 Eng 1deni maulana sidikNo ratings yet
- SERIES 200 & 220: Pumping PrincipleDocument12 pagesSERIES 200 & 220: Pumping PrincipleRSS RSSNo ratings yet
- Consumer Perception: Learning ObjectivesDocument61 pagesConsumer Perception: Learning ObjectivesKirthi KshatriyasNo ratings yet
- Komatsu Engine Saa6d140e 5 Workshop ManualsDocument20 pagesKomatsu Engine Saa6d140e 5 Workshop Manualsbilly100% (55)
- Liquid Ring Vacuum Pump Construction and WorkingDocument2 pagesLiquid Ring Vacuum Pump Construction and Workingwindgust82No ratings yet
- Altivar Process Drive Systems: Exchange The Power FanDocument4 pagesAltivar Process Drive Systems: Exchange The Power FanDarwin Jesús Arela QuispeNo ratings yet
- Gate Kashagan Main Works: Safety Toolbox TalkDocument1 pageGate Kashagan Main Works: Safety Toolbox TalkFenner ElectromechanicalNo ratings yet
- Chassis Design ImportantDocument27 pagesChassis Design ImportantNandan PoojaryNo ratings yet
- Wheels HomeDocument103 pagesWheels HomeDavid SebastianNo ratings yet
- 02 - STD - MCCB - Moulded Case Circuit Breakers - 2.25 - 2.26)Document2 pages02 - STD - MCCB - Moulded Case Circuit Breakers - 2.25 - 2.26)ThilinaNo ratings yet
- Vehicle Presentation Volkswagen FOX: Waldemar SteuerDocument39 pagesVehicle Presentation Volkswagen FOX: Waldemar SteuerMihai MocanuNo ratings yet
- Statics - Assignment 8: MCE 111 MechanicsDocument4 pagesStatics - Assignment 8: MCE 111 MechanicsOmar NabilNo ratings yet