Download as pdf or txt
You might also like
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- Rt22-652 Dishwasher c978Document4 pagesRt22-652 Dishwasher c978pasantitoNo ratings yet
- ZTE Dynamic Adjustment of FACH PowerDocument16 pagesZTE Dynamic Adjustment of FACH PowerAsad MalikNo ratings yet
- Aerzen Standards About Performance Measurement: and For Calculation of The Standard Volume FlowDocument4 pagesAerzen Standards About Performance Measurement: and For Calculation of The Standard Volume FlowSeyedAli TabatabaeeNo ratings yet
- Aerzen Standards About Performance Measurement: and For Calculation of The Standard Volume FlowDocument4 pagesAerzen Standards About Performance Measurement: and For Calculation of The Standard Volume Flowalpim54No ratings yet
- 19010205-SC 03Document28 pages19010205-SC 03JudeNo ratings yet
- Ax5000 Cogging Compensation enDocument6 pagesAx5000 Cogging Compensation encai minkeNo ratings yet
- PowerFlex® 7000 Medium Voltage AC DriveDocument350 pagesPowerFlex® 7000 Medium Voltage AC DriveAndrès G GENo ratings yet
- Automatic Voltage and Frequency Control of A Diesel Generator Using Ni MyrioDocument4 pagesAutomatic Voltage and Frequency Control of A Diesel Generator Using Ni MyrioNihar RoyNo ratings yet
- 10-Power Factor Corrector Chapter 10Document36 pages10-Power Factor Corrector Chapter 10cmrig74No ratings yet
- Paper 1Document11 pagesPaper 1Arkan ahmed husseinNo ratings yet
- PowerFlex 7000 Medium Voltage AC DriveDocument350 pagesPowerFlex 7000 Medium Voltage AC Drivesalmo83:18No ratings yet
- 80 1143 03 Rev. 07.1 11 430 Man. Opt. 9 PDFDocument68 pages80 1143 03 Rev. 07.1 11 430 Man. Opt. 9 PDFCristi MarianNo ratings yet
- 1000 HZ Output Frequency: FLASH Memory Software Option Part Number: GPD515C-XXXX-CS004Document4 pages1000 HZ Output Frequency: FLASH Memory Software Option Part Number: GPD515C-XXXX-CS004viernes06No ratings yet
- 6R6RA70 Calculation ParametersDocument3 pages6R6RA70 Calculation Parameterssanjaya srivastavaNo ratings yet
- Evs27 200013Document7 pagesEvs27 200013Trần Tấn LộcNo ratings yet
- Manual Do Usuario L?-V-SD SeriesDocument340 pagesManual Do Usuario L?-V-SD SeriesEdimilson RodriguesNo ratings yet
- AGN 009 - Bearing LifeDocument6 pagesAGN 009 - Bearing LifeariwibowoNo ratings yet
- Wind Control 2020Document29 pagesWind Control 2020Mike ACNo ratings yet
- Design and Analysis of ANFIS Based BLDC MotorDocument6 pagesDesign and Analysis of ANFIS Based BLDC MotorRahardian TristantoNo ratings yet
- Drmos Specifications: November 2004 Revision 1.0Document17 pagesDrmos Specifications: November 2004 Revision 1.0Tran Xuan NamNo ratings yet
- WEG CFW500 Programming Manual 10006739425 enDocument285 pagesWEG CFW500 Programming Manual 10006739425 en211128090No ratings yet
- Adjustable-Speed Drives: Common TermsDocument15 pagesAdjustable-Speed Drives: Common Termssyed wasiqNo ratings yet
- WDM BoardsDocument7 pagesWDM BoardsArthur SeryNo ratings yet
- Yaskawa Sigma V 02Document430 pagesYaskawa Sigma V 02thanh_cdt01100% (1)
- Yaskawa Manuals 4200Document435 pagesYaskawa Manuals 4200lopezsanchezjoseadrian7No ratings yet
- External Characteristics of DC Shunt GeneratorDocument6 pagesExternal Characteristics of DC Shunt GeneratorSuyash SinghNo ratings yet
- MPFC 115 270 HP DatasheetDocument18 pagesMPFC 115 270 HP DatasheetRonaldo Alejandro Lopez RodriguezNo ratings yet
- SIMOREG As A Field Supply Unit PDFDocument16 pagesSIMOREG As A Field Supply Unit PDFRafaelNo ratings yet
- Sieps80000098c 2 0 PDFDocument363 pagesSieps80000098c 2 0 PDFCarlos RuizNo ratings yet
- Output Voltage PID F7 Drive Software Technical ManualDocument8 pagesOutput Voltage PID F7 Drive Software Technical ManualphysicudoNo ratings yet
- ALSPA Adaptive PSS - Technical DescriptionDocument5 pagesALSPA Adaptive PSS - Technical DescriptionLiviuNo ratings yet
- Sieps80000093c 4 0Document410 pagesSieps80000093c 4 0Vòng Huy HoàngNo ratings yet
- Sigma5 Driver User's ManualDocument320 pagesSigma5 Driver User's ManualTrí ChốtNo ratings yet
- 044A7 - Functional Specs - Elec - P2Document53 pages044A7 - Functional Specs - Elec - P2applepc.onlineNo ratings yet
- Loss OF: Minimization Control An Induction Motor DriveDocument6 pagesLoss OF: Minimization Control An Induction Motor DriveJisha KuruvillaNo ratings yet
- Practical Activity 2 DC Shunt Motor PLMDocument9 pagesPractical Activity 2 DC Shunt Motor PLMMarc Jairro GajudoNo ratings yet
- Microstep-Driver R60Document12 pagesMicrostep-Driver R60Yudes LiyanageNo ratings yet
- Loss Minimization Control of An Induction Motor DriveDocument6 pagesLoss Minimization Control of An Induction Motor DriveKise RyotaNo ratings yet
- Sistema Edc VolvoDocument4 pagesSistema Edc VolvoJuan Carlos Callas GarayNo ratings yet
- 6) 4H.1380.02.0.PR - Installation Service & Maintenance Manual For Ac Kirloskar Green Ac LS GeneratorDocument27 pages6) 4H.1380.02.0.PR - Installation Service & Maintenance Manual For Ac Kirloskar Green Ac LS GeneratorAlfiya AnamNo ratings yet
- AC Drives and Soft Starter Application GuideDocument5 pagesAC Drives and Soft Starter Application GuideMinh TranNo ratings yet
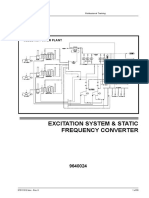
- Excitation Sys & SFCDocument55 pagesExcitation Sys & SFCABVSAI100% (1)
- Sensorless Field Oriented Control (FOC) of An AC Inductive MotorDocument34 pagesSensorless Field Oriented Control (FOC) of An AC Inductive MotorpaaraibNo ratings yet
- Accel500 Speedlooptuning SWDocument15 pagesAccel500 Speedlooptuning SWAsz TechNo ratings yet
- Automated Guided Vehicle: System Configuration)Document8 pagesAutomated Guided Vehicle: System Configuration)Rafael GagoNo ratings yet
- Flux WeakningDocument4 pagesFlux WeakningShivendraSaurabhNo ratings yet
- Adjustment of Servo System : (Trial Run of Unit / Trial Run Combined With Mechanism)Document7 pagesAdjustment of Servo System : (Trial Run of Unit / Trial Run Combined With Mechanism)Chandru ChristurajNo ratings yet
- Manuelle Feldkennlinienaufnahme 76 PDFDocument4 pagesManuelle Feldkennlinienaufnahme 76 PDFdangthutqmNo ratings yet
- EE8401 2M QB EM-II - by EasyEngineering - Net 2Document30 pagesEE8401 2M QB EM-II - by EasyEngineering - Net 2Lokey LokeshNo ratings yet
- Falt & AlarmDocument26 pagesFalt & Alarmpartha majiNo ratings yet
- Transformer SizingDocument15 pagesTransformer SizingRaj100% (1)
- Chapter-1: 1.1 Pi ControllerDocument21 pagesChapter-1: 1.1 Pi ControllerRAVINA MANGALNo ratings yet
- Apfc PanelDocument7 pagesApfc PanelChander MohanNo ratings yet
- LSM200Series 03 03 24 en Technical - Description HT PDFDocument11 pagesLSM200Series 03 03 24 en Technical - Description HT PDFhermesdemeNo ratings yet
- Altivar AFE 2013Document103 pagesAltivar AFE 2013mehdi RNo ratings yet
- 6se7014 AlarmDocument27 pages6se7014 AlarmFida HussainNo ratings yet
- DSAZIHA2X000123441Document18 pagesDSAZIHA2X000123441Abdul QadeerNo ratings yet
- VRM 9.1 DC-DC Converter Design Guidelines: Order Number 298646-001Document18 pagesVRM 9.1 DC-DC Converter Design Guidelines: Order Number 298646-001draNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Machine 2 Lab Exp 6Document11 pagesMachine 2 Lab Exp 6Ahmed Bin MustafaNo ratings yet
- SHERWIN-REYES-TechSmith-Tutorial Video Script TemplateDocument2 pagesSHERWIN-REYES-TechSmith-Tutorial Video Script TemplateSHERWIN REYESNo ratings yet
- 2.7. LBB - 1990Document3 pages2.7. LBB - 1990design mepNo ratings yet
- SYMBOLDocument18 pagesSYMBOLBrother ElyNo ratings yet
- Platform Bed: ModerateDocument13 pagesPlatform Bed: Moderatemcvelli40No ratings yet
- PCB DesignDocument30 pagesPCB DesignACer DanNo ratings yet
- Cdot An-RaxDocument46 pagesCdot An-Raxneeraj kumar singh100% (2)
- Print PC - PC Builder - Star TechDocument2 pagesPrint PC - PC Builder - Star TechZadid Ahsan KhanNo ratings yet
- Controller 6610 Data SheetDocument2 pagesController 6610 Data SheetGhizlane Mounjim100% (2)
- Aditamento Toyotas 55f-Sss-A087r5Document6 pagesAditamento Toyotas 55f-Sss-A087r5luis david vela arellanoNo ratings yet
- Gopak Hydraulic Power Unit & Godesigner Design ConfiguratorDocument8 pagesGopak Hydraulic Power Unit & Godesigner Design ConfiguratorALEXSANDRONo ratings yet
- APAQDocument4 pagesAPAQSmărăDavidNo ratings yet
- Anesthesia MachineDocument54 pagesAnesthesia MachineSador YonasNo ratings yet
- Qoriq Ls1028A Reference Design Board Reference Manual: Supports Ls1028Ardb Revision CDocument107 pagesQoriq Ls1028A Reference Design Board Reference Manual: Supports Ls1028Ardb Revision Csanthosha rkNo ratings yet
- Dell N5010 Berry DG15 Discrete UMA Rev X01 INTEL SchematicsDocument92 pagesDell N5010 Berry DG15 Discrete UMA Rev X01 INTEL SchematicsDarcio TolottiNo ratings yet
- t4759 Bmu PlusDocument6 pagest4759 Bmu PlusDraganaNo ratings yet
- Mini 1U Series DVR User's Manual V1.1.1 201301Document150 pagesMini 1U Series DVR User's Manual V1.1.1 201301'Gustavo JuiNo ratings yet
- OKI Printer Error CodesDocument4 pagesOKI Printer Error CodesReginaldo BandeiraNo ratings yet
- Ethernet Wiring Diagram PDFDocument2 pagesEthernet Wiring Diagram PDFAaliyyahNo ratings yet
- Specifications: ST100: FEB 2014 - Rev 4.0Document4 pagesSpecifications: ST100: FEB 2014 - Rev 4.0leonidas cespedesNo ratings yet
- VDV500-705 Manual PDFDocument2 pagesVDV500-705 Manual PDFtangcvNo ratings yet
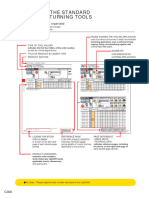
- Catalog C009a External Turning ToolsDocument44 pagesCatalog C009a External Turning ToolsPhạm Hoài AnhNo ratings yet
- Project Report 1Document20 pagesProject Report 1ernestoNo ratings yet
- Automated Machine Technical Setup Manual DTSDocument16 pagesAutomated Machine Technical Setup Manual DTSFabiola RuizNo ratings yet
- 15EC73Document307 pages15EC73KN DEEPSHINo ratings yet
- Figure 2: Cleco The Top Tank Skin: Van'S Aircraft, IncDocument1 pageFigure 2: Cleco The Top Tank Skin: Van'S Aircraft, IncMark Evan SalutinNo ratings yet
- Bidirectional Visitor CounterDocument8 pagesBidirectional Visitor CounterkiraNo ratings yet
- Optimization and Control of HydroponicsDocument88 pagesOptimization and Control of HydroponicsDeepak KNo ratings yet
- Dell-2408wfp User's GuideDocument41 pagesDell-2408wfp User's Guideleneneck9057No ratings yet