Download as pdf or txt
You might also like
- Induction Motor Problems With SolutionsDocument24 pagesInduction Motor Problems With SolutionsVíctor RojasNo ratings yet
- Bedini Energizer Building ManualDocument32 pagesBedini Energizer Building ManualRobert Scott93% (15)
- Alternator Static Field Exciter (AFSE) Trouble Shooting Guide For 17FM466 and 17FM689Document26 pagesAlternator Static Field Exciter (AFSE) Trouble Shooting Guide For 17FM466 and 17FM689Emilio Cortes T.88% (8)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- HSC Physics K.I.S.S. Motors & GeneratorsDocument31 pagesHSC Physics K.I.S.S. Motors & GeneratorsRhea Sharma100% (2)
- Stepper MotorDocument16 pagesStepper Motorpartha DasNo ratings yet
- Stepper MotorDocument18 pagesStepper MotorGanesh Pingle100% (1)
- Unit III SPMDocument65 pagesUnit III SPMMukesh KatoleNo ratings yet
- Unit I (SM) PDFDocument89 pagesUnit I (SM) PDFshiva sai donthulaNo ratings yet
- Stepper MotorsDocument53 pagesStepper MotorsirfancardiagnosticNo ratings yet
- A Stepper Motor Is A "Pulse-Driven" Motor That Changes The Angular Position of The Rotor in "Steps" It Is A Digital Electromechanical Device DefineDocument35 pagesA Stepper Motor Is A "Pulse-Driven" Motor That Changes The Angular Position of The Rotor in "Steps" It Is A Digital Electromechanical Device DefineSupriya RakshitNo ratings yet
- Stepper MotorDocument25 pagesStepper Motorhemamanikumar100% (1)
- What Is A Stepper MotorDocument12 pagesWhat Is A Stepper MotorteddiyfentawNo ratings yet
- Stepper MotorsDocument17 pagesStepper MotorsJadeNo ratings yet
- Arbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorDocument12 pagesArbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorEphrem DanielNo ratings yet
- Stepper MotorDocument11 pagesStepper MotorhaaenNo ratings yet
- I/ Structure and Operation: Stepper MotorDocument11 pagesI/ Structure and Operation: Stepper MotorTuanVUNo ratings yet
- Stepper MotorDocument13 pagesStepper Motorjit dharaNo ratings yet
- H Assignment 2Document5 pagesH Assignment 2Isuru KodikaraNo ratings yet
- Controlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACDocument17 pagesControlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACandita ranniNo ratings yet
- Stepper Motor: Working, Cosntruction, Types, Advantages and DisadvantagesDocument5 pagesStepper Motor: Working, Cosntruction, Types, Advantages and DisadvantagesMd Samee MNo ratings yet
- A Stepper MotorDocument10 pagesA Stepper MotorMohammed SiddiqueNo ratings yet
- Ee 2403 Special Electrical MachinesDocument21 pagesEe 2403 Special Electrical MachinesSurya KrishnanNo ratings yet
- MotorDocument29 pagesMotorbokor45836No ratings yet
- Servo MotorDocument4 pagesServo MotorWasil BabarNo ratings yet
- Special Purpose Motors and Control DevicesDocument43 pagesSpecial Purpose Motors and Control DevicesDominick BasNo ratings yet
- Stepper Motor AssignmentDocument12 pagesStepper Motor AssignmentShyamu29No ratings yet
- Remote Control of Stepper MotorDocument26 pagesRemote Control of Stepper Motorarunbera007No ratings yet
- Joystick Control of Stepper Motor Using ArduinoDocument7 pagesJoystick Control of Stepper Motor Using ArduinoDany Mathew100% (2)
- Q4 Electro Stepper and Servo (Research)Document2 pagesQ4 Electro Stepper and Servo (Research)Kim SalvadorNo ratings yet
- Tugas AjaDocument4 pagesTugas AjaIka Bayu RamadhanaNo ratings yet
- Stepper Motor: From Wikipedia, The Free EncyclopediaDocument42 pagesStepper Motor: From Wikipedia, The Free EncyclopediaJoeson RosarioNo ratings yet
- Steppermotor Lecture 17Document12 pagesSteppermotor Lecture 17Ms Noor ul AinNo ratings yet
- Stepper Motor Control Through RF LinkDocument12 pagesStepper Motor Control Through RF Linkmrx1061100% (1)
- Stepper Motor ReportDocument19 pagesStepper Motor ReportIan Bagunas100% (2)
- Special Electrical MachinesDocument5 pagesSpecial Electrical MachinesEswaran0% (1)
- unit 2 steppermotorDocument7 pagesunit 2 steppermotorRAMESH BABU EEENo ratings yet
- Stepper Motor PDFDocument15 pagesStepper Motor PDFNadeeshani SamarasingheNo ratings yet
- Electrical Actuation SystemDocument8 pagesElectrical Actuation SystemShriyash KamatNo ratings yet
- Principle of Operation: Key Elements Interacting To Produce MotionDocument5 pagesPrinciple of Operation: Key Elements Interacting To Produce MotionamitbslpawarNo ratings yet
- There Are Few Types of Stepper MotorsDocument41 pagesThere Are Few Types of Stepper Motorsmanoj kumarNo ratings yet
- Electric DrivesDocument16 pagesElectric DrivesvigneshNo ratings yet
- Stepper Motor at Final AbstactDocument3 pagesStepper Motor at Final AbstactKISHORE KNo ratings yet
- Special - Electrical - Machines QBDocument25 pagesSpecial - Electrical - Machines QBVel MuruganNo ratings yet
- Stepper MotorDocument12 pagesStepper MotorToheebNo ratings yet
- DC MotorsDocument45 pagesDC Motorstristan jeff bautistaNo ratings yet
- Stepper Motor Basics: Applicationnote001Document13 pagesStepper Motor Basics: Applicationnote001shark seas100% (1)
- Experiment #09 Stepper Motor Interfacing With Arduino/ Microcontroller Energy ObjectivesDocument8 pagesExperiment #09 Stepper Motor Interfacing With Arduino/ Microcontroller Energy ObjectivesAyaz FaisalNo ratings yet
- Ammar RoboticDocument11 pagesAmmar RoboticNIK FARISNo ratings yet
- Stepper MotorDocument14 pagesStepper MotorJade Mark RamosNo ratings yet
- Unit Ii PDFDocument17 pagesUnit Ii PDFManojKumar MNo ratings yet
- MotorDocument18 pagesMotorJefferson BarriosNo ratings yet
- "Stepper Motor Control Using Arduino": Minor ProjectDocument22 pages"Stepper Motor Control Using Arduino": Minor ProjectNâwãl KîšhôřNo ratings yet
- Stepper MotorDocument26 pagesStepper MotorSupriya Rakshit100% (1)
- Motores A PasosDocument97 pagesMotores A PasosJonathan TerrónNo ratings yet
- DK9222 0410 0014Document10 pagesDK9222 0410 0014Balachander KalappanNo ratings yet
- 061709-Introduction To MotorsDocument27 pages061709-Introduction To MotorsmohanmzcetNo ratings yet
- Stepper Motor DFLTDocument16 pagesStepper Motor DFLTvisdhoniNo ratings yet
- Stepper Motor & Servo Motor: S.RavisubramanianDocument78 pagesStepper Motor & Servo Motor: S.RavisubramanianRajesh Vella100% (3)
- An001 enDocument13 pagesAn001 enQuynh NguyenNo ratings yet
- Special Electrical Machines Ee2403 PDFDocument16 pagesSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Stepper Motor - Types, Advantages and ApplicationsDocument2 pagesStepper Motor - Types, Advantages and ApplicationsBilalNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Godspower Sabastine Bruno: JANUARY, 2022Document37 pagesGodspower Sabastine Bruno: JANUARY, 2022godspower brunoNo ratings yet
- Alternator WithDocument26 pagesAlternator Withjaneth.10037No ratings yet
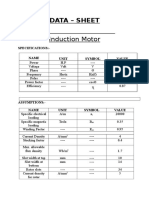
- Design of A Squirrel Cage Induction Motor: Data - SheetDocument7 pagesDesign of A Squirrel Cage Induction Motor: Data - SheetSovanSurNo ratings yet
- Switched Reluctance MotorsDocument27 pagesSwitched Reluctance Motorssanatkumar1990No ratings yet
- Three-Phase Induction Motor Part-1Document49 pagesThree-Phase Induction Motor Part-1Kazi Newaj FaisalNo ratings yet
- Analysis of The Yokeless and Segmented Armature MachineDocument7 pagesAnalysis of The Yokeless and Segmented Armature Machineantriksh mahajanNo ratings yet
- BEE-lab, Experiment 4Document10 pagesBEE-lab, Experiment 4DHRUV JAINNo ratings yet
- Mechatronics MotorsDocument39 pagesMechatronics MotorsSanskar AgrawalNo ratings yet
- Generator ProtectionDocument10 pagesGenerator ProtectionSriram rams100% (1)
- Electrical Eng NewDocument141 pagesElectrical Eng NewDianne GawdanNo ratings yet
- Eh Blower ManualDocument44 pagesEh Blower Manualterry.defaut9764100% (1)
- INTORQ BA BFK458 13343893 en 11 2018 96dpi PDFDocument74 pagesINTORQ BA BFK458 13343893 en 11 2018 96dpi PDFOliver Quezada InostrozaNo ratings yet
- Saliency Modelling On PMSMDocument6 pagesSaliency Modelling On PMSMmizamaeNo ratings yet
- v4555 PipDocument7 pagesv4555 Pipbdrepublicadominicana2020No ratings yet
- Ee Objective ReeDocument37 pagesEe Objective ReeErven Martinez100% (7)
- Hydro RandmDocument68 pagesHydro RandmPUNEETNo ratings yet
- EEE363 (Exp 7) Study of The Starting Characteristics and Torque Speed Relationship of Three Phase Synchronous MotorDocument6 pagesEEE363 (Exp 7) Study of The Starting Characteristics and Torque Speed Relationship of Three Phase Synchronous Motorsalad.ass420420No ratings yet
- EE3405 Electrical Machines II PDFDocument4 pagesEE3405 Electrical Machines II PDFkaviinfoenggNo ratings yet
- Reading.6 - Introduction To Electric MachinesDocument8 pagesReading.6 - Introduction To Electric MachinesCát TườngNo ratings yet
- Mine Electrical Study GuideDocument314 pagesMine Electrical Study GuideAnand AgrawalNo ratings yet
- Motors FDocument56 pagesMotors FRanjan MuthannaNo ratings yet
- 8051 Lab Stepper Motor InterfacingDocument5 pages8051 Lab Stepper Motor InterfacingGirish ChapleNo ratings yet
- Solar Electric BicycleDocument38 pagesSolar Electric Bicycleanon_171257235100% (9)
- 04 - Arranque de MotoresDocument13 pages04 - Arranque de MotoresJadu QuinoNo ratings yet
- Induction MotorsDocument47 pagesInduction MotorsPurushothaman KannanNo ratings yet
- Integrated Starter-Alternator SystemDocument7 pagesIntegrated Starter-Alternator Systempixelo09No ratings yet