
Itu Lecture3 Rev01
Itu Lecture3 Rev01
You might also like
- 4.3 Motion in One Direction WSDocument3 pages4.3 Motion in One Direction WSArli Mexquititla100% (3)
- Internal Order in Crystals1Document35 pagesInternal Order in Crystals1Kripa KattelNo ratings yet
- AD&C Lecture 1newDocument78 pagesAD&C Lecture 1newinnobobothebossNo ratings yet
- Lecture 3Document31 pagesLecture 3Wolf DragonneNo ratings yet
- Orientation, Rotation, Euler Angles & QuaternionsDocument7 pagesOrientation, Rotation, Euler Angles & Quaternionsgaspar guillemainNo ratings yet
- L Gear TrainsDocument88 pagesL Gear TrainsAditya Shubham Garg100% (1)
- Euler Angles PDFDocument2 pagesEuler Angles PDFGuillermoNo ratings yet
- AN002 Application Note: What Is A Quaternion?Document3 pagesAN002 Application Note: What Is A Quaternion?kirancallsNo ratings yet
- Design of Helical GearsDocument14 pagesDesign of Helical GearsAjay Kumar Reddy KNo ratings yet
- Torsion - Part 2Document20 pagesTorsion - Part 2Talat ÇelebiNo ratings yet
- Modeling of Rotational Systems 2023Document62 pagesModeling of Rotational Systems 2023Ndyamusiima SeresiNo ratings yet
- Ch02 2Document35 pagesCh02 2이재봉No ratings yet
- CH 8.1 - April 11-Updated Lesson 1Document38 pagesCH 8.1 - April 11-Updated Lesson 1jujuNo ratings yet
- Gyroscopic CoupleDocument22 pagesGyroscopic CoupleRohit NewarNo ratings yet
- M ERIAMDocument51 pagesM ERIAMsauravkr2027No ratings yet
- Controlliability 2Document10 pagesControlliability 2chinapaulNo ratings yet
- 5-Mechanism For ControlDocument164 pages5-Mechanism For ControlsolomonrajarNo ratings yet
- Toothed Gearing: (Chapter-12 R.S. KHURMI)Document35 pagesToothed Gearing: (Chapter-12 R.S. KHURMI)Somnath Somadder100% (1)
- Module4geartrains 190118175406Document41 pagesModule4geartrains 190118175406Mohamed El.shenawYNo ratings yet
- Robotics Kinematics and DynamicsDocument6 pagesRobotics Kinematics and Dynamicsfadyah yulitaNo ratings yet
- Lecture 10: Curl: Can Evaluate 3 Components by Taking Areas With Normals in Xyz DirectionsDocument9 pagesLecture 10: Curl: Can Evaluate 3 Components by Taking Areas With Normals in Xyz DirectionsthgnguyenNo ratings yet
- MTM 2Document28 pagesMTM 2RajendrakumarNo ratings yet
- 2 Strain IDocument52 pages2 Strain ISEDRAZNADNo ratings yet
- Axis-Angle RepresentationDocument6 pagesAxis-Angle RepresentationSAN JUAN BAUTISTANo ratings yet
- Unit 7 Geartrains 130404060224 Phpapp01Document25 pagesUnit 7 Geartrains 130404060224 Phpapp01SHRIMAN SRINIVASAN (RA1811018010044)No ratings yet
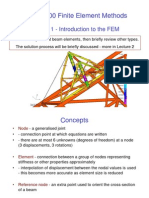
- MECH3300 Finite Element Methods: Lecture 1 - Introduction To The FEMDocument15 pagesMECH3300 Finite Element Methods: Lecture 1 - Introduction To The FEMKrishna MyakalaNo ratings yet
- Robotics Kinematics and DynamicsDocument24 pagesRobotics Kinematics and Dynamicsأحمد دعبسNo ratings yet
- Crystal SymmetryDocument50 pagesCrystal Symmetryfatih muhammadNo ratings yet
- Four Types of MotionDocument30 pagesFour Types of MotionRonyNo ratings yet
- Chapter10 180706202937Document33 pagesChapter10 180706202937SALEEM MALIKNo ratings yet
- (PreCal 11) Conic Section - Ellipse PDFDocument49 pages(PreCal 11) Conic Section - Ellipse PDFTeacher Len EnoyNo ratings yet
- Lesson 7 Space FrameDocument24 pagesLesson 7 Space Framecriscab12345No ratings yet
- Keuning J.A. - Keel - Rudder Interaction On A Sailing Yacht" - 2006Document16 pagesKeuning J.A. - Keel - Rudder Interaction On A Sailing Yacht" - 2006vladNo ratings yet
- Rotation MatrixDocument22 pagesRotation MatrixchessgeneralNo ratings yet
- Lecture 3Document7 pagesLecture 3navendu_nalNo ratings yet
- Hardy Cross InvestigationDocument12 pagesHardy Cross InvestigationalonsoNo ratings yet
- Helicopter StabilityDocument13 pagesHelicopter Stabilitymanikandan_murugaiahNo ratings yet
- An Overview: Presenter: Muhammad Khurram Javed 2008-EP-17Document40 pagesAn Overview: Presenter: Muhammad Khurram Javed 2008-EP-17Hew LetNo ratings yet
- Quantum NotesDocument9 pagesQuantum NotesMama PigNo ratings yet
- Wk6L16 18Document21 pagesWk6L16 18lengs SimzNo ratings yet
- 3D Rotations-Part 1Document9 pages3D Rotations-Part 1woof1800No ratings yet
- Mechanics of Machines: ODL - Week 6Document54 pagesMechanics of Machines: ODL - Week 6Faheem AhmadNo ratings yet
- Gyroscope: Presenter: Muhammad Khurram Javed 2008-EP-17Document23 pagesGyroscope: Presenter: Muhammad Khurram Javed 2008-EP-17Abhishek SavnaniNo ratings yet
- Slope Deflection Method Statically Indeterminate Beams and Frames Week 6: Lessons 16-18Document21 pagesSlope Deflection Method Statically Indeterminate Beams and Frames Week 6: Lessons 16-18lengs SimzNo ratings yet
- Introduction - Lecture 1-4Document56 pagesIntroduction - Lecture 1-4EMADNo ratings yet
- Gear & Gear TrainDocument20 pagesGear & Gear Trainniaz kilamNo ratings yet
- L - Universal or Hooke's JointDocument21 pagesL - Universal or Hooke's JointAditya Shubham GargNo ratings yet
- Anmol's DomDocument38 pagesAnmol's DomKishan KumarNo ratings yet
- Axial Flow Compressor CharacteristicsDocument5 pagesAxial Flow Compressor CharacteristicsRoshan ShanmughanNo ratings yet
- 5 CrystallographyDocument32 pages5 CrystallographyPrabhav DeujaNo ratings yet
- GyroscopeDocument21 pagesGyroscopeVijay GorfadNo ratings yet
- Aerobatic Figures: by Dr. Guenther EichhornDocument8 pagesAerobatic Figures: by Dr. Guenther EichhornHubert LindenthalerNo ratings yet
- Unsymmetrical Bending of Unsymmetrical SectionsDocument21 pagesUnsymmetrical Bending of Unsymmetrical Sectionsaqib sohailNo ratings yet
- Presenter:: Bariya Pratikkumar R. Gandhi Rushi A. Bhatwadekar Chaitanya SDocument40 pagesPresenter:: Bariya Pratikkumar R. Gandhi Rushi A. Bhatwadekar Chaitanya SPratik BariyaNo ratings yet
- Cam MechDocument24 pagesCam MechmarcglebNo ratings yet
- SM II 1Document128 pagesSM II 1lokesh.ecb2658No ratings yet
- Lecture 1Document2 pagesLecture 1334Khandaker Zamilish ShiyameeNo ratings yet
- Multilinear Functions Of Direction And Their Uses In Differential GeometryFrom EverandMultilinear Functions Of Direction And Their Uses In Differential GeometryNo ratings yet
- Orthographic Projection: Exploring Orthographic Projection in Computer VisionFrom EverandOrthographic Projection: Exploring Orthographic Projection in Computer VisionNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Some Best Questions On TrigonometryDocument4 pagesSome Best Questions On TrigonometryRaghav MadanNo ratings yet
- 15 Chapter-15Document10 pages15 Chapter-15rajpersonalNo ratings yet
- A Comparative Design of Satellite Attitude Control System With Reaction WheelDocument4 pagesA Comparative Design of Satellite Attitude Control System With Reaction WheelAGonzalezNo ratings yet
- Sound WavesDocument13 pagesSound WavesAndrewKiNo ratings yet
- Principal Moments of InertiaDocument13 pagesPrincipal Moments of Inertiabruno_matos7No ratings yet
- Lec. 1Document14 pagesLec. 1Omar MohamedNo ratings yet
- Physics Newtons Second Law ExperimentDocument4 pagesPhysics Newtons Second Law Experiment908039480No ratings yet
- 9th Physics 200 Imp. MCQs - SolutionDocument10 pages9th Physics 200 Imp. MCQs - SolutionMUHAMMAD SOHAIL KASWARNo ratings yet
- Chapter 7 Forced Convectionxexternal FlowDocument19 pagesChapter 7 Forced Convectionxexternal FlowDazuky UkyNo ratings yet
- Phy Assignment1Document7 pagesPhy Assignment1AakashRajNo ratings yet
- Lesson 1Document21 pagesLesson 11jerryzhouNo ratings yet
- The Electromagnetic Spectrum Intro Web TaskDocument4 pagesThe Electromagnetic Spectrum Intro Web Taskapi-308495066No ratings yet
- CALCULUS BASED PHYSIC1 PRE Quiz1 FINALSDocument100 pagesCALCULUS BASED PHYSIC1 PRE Quiz1 FINALSJaiNo ratings yet
- BERNOULLI TheoremDocument5 pagesBERNOULLI TheoremHafizNoteyNo ratings yet
- Newton First Law of MotionDocument18 pagesNewton First Law of MotionXkskdc Sjajcja100% (2)
- Roll-Rates Instantaneous-SustainedDocument5 pagesRoll-Rates Instantaneous-SustainedAidan MonaghanNo ratings yet
- Msa Lab ManualDocument16 pagesMsa Lab ManualAcchyutjhNo ratings yet
- 2 Point SourcesDocument16 pages2 Point SourcesJULIETHERESE MNo ratings yet
- Physics 71 Syllabus 2nd Sem AY2016-2017Document8 pagesPhysics 71 Syllabus 2nd Sem AY2016-2017011100111No ratings yet
- Gravitational Field Tutorial PHY101Document7 pagesGravitational Field Tutorial PHY101kalahanmoonga82No ratings yet
- Week 7 Template PDFDocument15 pagesWeek 7 Template PDFAngelica LosaresNo ratings yet
- Internal Flows (Laminar Flow) : Lecture - 04Document25 pagesInternal Flows (Laminar Flow) : Lecture - 04غيث منعمNo ratings yet
- Mini Launcher Lab ReportDocument7 pagesMini Launcher Lab ReportMohammad AnasNo ratings yet
- All WavesDocument155 pagesAll WavesTenisha CastilloNo ratings yet
- Class Test 9th MotionDocument3 pagesClass Test 9th Motionsudhir_kumar_33100% (1)
- Module 2 Modern Physics & Quantum MechanicsDocument34 pagesModule 2 Modern Physics & Quantum Mechanicsgoutami SunthankarNo ratings yet
- Work, Power and EnergyDocument5 pagesWork, Power and EnergysinghashubhadeepNo ratings yet
- Pressure Distribution On A CylinderDocument7 pagesPressure Distribution On A CylinderSaahil Sankar BNo ratings yet
- Vibration AnalysisDocument31 pagesVibration AnalysisDinesh Mohitkar50% (2)
























































































Download as pdf or txt
You might also like
- 4.3 Motion in One Direction WSDocument3 pages4.3 Motion in One Direction WSArli Mexquititla100% (3)
- Internal Order in Crystals1Document35 pagesInternal Order in Crystals1Kripa KattelNo ratings yet
- AD&C Lecture 1newDocument78 pagesAD&C Lecture 1newinnobobothebossNo ratings yet
- Lecture 3Document31 pagesLecture 3Wolf DragonneNo ratings yet
- Orientation, Rotation, Euler Angles & QuaternionsDocument7 pagesOrientation, Rotation, Euler Angles & Quaternionsgaspar guillemainNo ratings yet
- L Gear TrainsDocument88 pagesL Gear TrainsAditya Shubham Garg100% (1)
- Euler Angles PDFDocument2 pagesEuler Angles PDFGuillermoNo ratings yet
- AN002 Application Note: What Is A Quaternion?Document3 pagesAN002 Application Note: What Is A Quaternion?kirancallsNo ratings yet
- Design of Helical GearsDocument14 pagesDesign of Helical GearsAjay Kumar Reddy KNo ratings yet
- Torsion - Part 2Document20 pagesTorsion - Part 2Talat ÇelebiNo ratings yet
- Modeling of Rotational Systems 2023Document62 pagesModeling of Rotational Systems 2023Ndyamusiima SeresiNo ratings yet
- Ch02 2Document35 pagesCh02 2이재봉No ratings yet
- CH 8.1 - April 11-Updated Lesson 1Document38 pagesCH 8.1 - April 11-Updated Lesson 1jujuNo ratings yet
- Gyroscopic CoupleDocument22 pagesGyroscopic CoupleRohit NewarNo ratings yet
- M ERIAMDocument51 pagesM ERIAMsauravkr2027No ratings yet
- Controlliability 2Document10 pagesControlliability 2chinapaulNo ratings yet
- 5-Mechanism For ControlDocument164 pages5-Mechanism For ControlsolomonrajarNo ratings yet
- Toothed Gearing: (Chapter-12 R.S. KHURMI)Document35 pagesToothed Gearing: (Chapter-12 R.S. KHURMI)Somnath Somadder100% (1)
- Module4geartrains 190118175406Document41 pagesModule4geartrains 190118175406Mohamed El.shenawYNo ratings yet
- Robotics Kinematics and DynamicsDocument6 pagesRobotics Kinematics and Dynamicsfadyah yulitaNo ratings yet
- Lecture 10: Curl: Can Evaluate 3 Components by Taking Areas With Normals in Xyz DirectionsDocument9 pagesLecture 10: Curl: Can Evaluate 3 Components by Taking Areas With Normals in Xyz DirectionsthgnguyenNo ratings yet
- MTM 2Document28 pagesMTM 2RajendrakumarNo ratings yet
- 2 Strain IDocument52 pages2 Strain ISEDRAZNADNo ratings yet
- Axis-Angle RepresentationDocument6 pagesAxis-Angle RepresentationSAN JUAN BAUTISTANo ratings yet
- Unit 7 Geartrains 130404060224 Phpapp01Document25 pagesUnit 7 Geartrains 130404060224 Phpapp01SHRIMAN SRINIVASAN (RA1811018010044)No ratings yet
- MECH3300 Finite Element Methods: Lecture 1 - Introduction To The FEMDocument15 pagesMECH3300 Finite Element Methods: Lecture 1 - Introduction To The FEMKrishna MyakalaNo ratings yet
- Robotics Kinematics and DynamicsDocument24 pagesRobotics Kinematics and Dynamicsأحمد دعبسNo ratings yet
- Crystal SymmetryDocument50 pagesCrystal Symmetryfatih muhammadNo ratings yet
- Four Types of MotionDocument30 pagesFour Types of MotionRonyNo ratings yet
- Chapter10 180706202937Document33 pagesChapter10 180706202937SALEEM MALIKNo ratings yet
- (PreCal 11) Conic Section - Ellipse PDFDocument49 pages(PreCal 11) Conic Section - Ellipse PDFTeacher Len EnoyNo ratings yet
- Lesson 7 Space FrameDocument24 pagesLesson 7 Space Framecriscab12345No ratings yet
- Keuning J.A. - Keel - Rudder Interaction On A Sailing Yacht" - 2006Document16 pagesKeuning J.A. - Keel - Rudder Interaction On A Sailing Yacht" - 2006vladNo ratings yet
- Rotation MatrixDocument22 pagesRotation MatrixchessgeneralNo ratings yet
- Lecture 3Document7 pagesLecture 3navendu_nalNo ratings yet
- Hardy Cross InvestigationDocument12 pagesHardy Cross InvestigationalonsoNo ratings yet
- Helicopter StabilityDocument13 pagesHelicopter Stabilitymanikandan_murugaiahNo ratings yet
- An Overview: Presenter: Muhammad Khurram Javed 2008-EP-17Document40 pagesAn Overview: Presenter: Muhammad Khurram Javed 2008-EP-17Hew LetNo ratings yet
- Quantum NotesDocument9 pagesQuantum NotesMama PigNo ratings yet
- Wk6L16 18Document21 pagesWk6L16 18lengs SimzNo ratings yet
- 3D Rotations-Part 1Document9 pages3D Rotations-Part 1woof1800No ratings yet
- Mechanics of Machines: ODL - Week 6Document54 pagesMechanics of Machines: ODL - Week 6Faheem AhmadNo ratings yet
- Gyroscope: Presenter: Muhammad Khurram Javed 2008-EP-17Document23 pagesGyroscope: Presenter: Muhammad Khurram Javed 2008-EP-17Abhishek SavnaniNo ratings yet
- Slope Deflection Method Statically Indeterminate Beams and Frames Week 6: Lessons 16-18Document21 pagesSlope Deflection Method Statically Indeterminate Beams and Frames Week 6: Lessons 16-18lengs SimzNo ratings yet
- Introduction - Lecture 1-4Document56 pagesIntroduction - Lecture 1-4EMADNo ratings yet
- Gear & Gear TrainDocument20 pagesGear & Gear Trainniaz kilamNo ratings yet
- L - Universal or Hooke's JointDocument21 pagesL - Universal or Hooke's JointAditya Shubham GargNo ratings yet
- Anmol's DomDocument38 pagesAnmol's DomKishan KumarNo ratings yet
- Axial Flow Compressor CharacteristicsDocument5 pagesAxial Flow Compressor CharacteristicsRoshan ShanmughanNo ratings yet
- 5 CrystallographyDocument32 pages5 CrystallographyPrabhav DeujaNo ratings yet
- GyroscopeDocument21 pagesGyroscopeVijay GorfadNo ratings yet
- Aerobatic Figures: by Dr. Guenther EichhornDocument8 pagesAerobatic Figures: by Dr. Guenther EichhornHubert LindenthalerNo ratings yet
- Unsymmetrical Bending of Unsymmetrical SectionsDocument21 pagesUnsymmetrical Bending of Unsymmetrical Sectionsaqib sohailNo ratings yet
- Presenter:: Bariya Pratikkumar R. Gandhi Rushi A. Bhatwadekar Chaitanya SDocument40 pagesPresenter:: Bariya Pratikkumar R. Gandhi Rushi A. Bhatwadekar Chaitanya SPratik BariyaNo ratings yet
- Cam MechDocument24 pagesCam MechmarcglebNo ratings yet
- SM II 1Document128 pagesSM II 1lokesh.ecb2658No ratings yet
- Lecture 1Document2 pagesLecture 1334Khandaker Zamilish ShiyameeNo ratings yet
- Multilinear Functions Of Direction And Their Uses In Differential GeometryFrom EverandMultilinear Functions Of Direction And Their Uses In Differential GeometryNo ratings yet
- Orthographic Projection: Exploring Orthographic Projection in Computer VisionFrom EverandOrthographic Projection: Exploring Orthographic Projection in Computer VisionNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Some Best Questions On TrigonometryDocument4 pagesSome Best Questions On TrigonometryRaghav MadanNo ratings yet
- 15 Chapter-15Document10 pages15 Chapter-15rajpersonalNo ratings yet
- A Comparative Design of Satellite Attitude Control System With Reaction WheelDocument4 pagesA Comparative Design of Satellite Attitude Control System With Reaction WheelAGonzalezNo ratings yet
- Sound WavesDocument13 pagesSound WavesAndrewKiNo ratings yet
- Principal Moments of InertiaDocument13 pagesPrincipal Moments of Inertiabruno_matos7No ratings yet
- Lec. 1Document14 pagesLec. 1Omar MohamedNo ratings yet
- Physics Newtons Second Law ExperimentDocument4 pagesPhysics Newtons Second Law Experiment908039480No ratings yet
- 9th Physics 200 Imp. MCQs - SolutionDocument10 pages9th Physics 200 Imp. MCQs - SolutionMUHAMMAD SOHAIL KASWARNo ratings yet
- Chapter 7 Forced Convectionxexternal FlowDocument19 pagesChapter 7 Forced Convectionxexternal FlowDazuky UkyNo ratings yet
- Phy Assignment1Document7 pagesPhy Assignment1AakashRajNo ratings yet
- Lesson 1Document21 pagesLesson 11jerryzhouNo ratings yet
- The Electromagnetic Spectrum Intro Web TaskDocument4 pagesThe Electromagnetic Spectrum Intro Web Taskapi-308495066No ratings yet
- CALCULUS BASED PHYSIC1 PRE Quiz1 FINALSDocument100 pagesCALCULUS BASED PHYSIC1 PRE Quiz1 FINALSJaiNo ratings yet
- BERNOULLI TheoremDocument5 pagesBERNOULLI TheoremHafizNoteyNo ratings yet
- Newton First Law of MotionDocument18 pagesNewton First Law of MotionXkskdc Sjajcja100% (2)
- Roll-Rates Instantaneous-SustainedDocument5 pagesRoll-Rates Instantaneous-SustainedAidan MonaghanNo ratings yet
- Msa Lab ManualDocument16 pagesMsa Lab ManualAcchyutjhNo ratings yet
- 2 Point SourcesDocument16 pages2 Point SourcesJULIETHERESE MNo ratings yet
- Physics 71 Syllabus 2nd Sem AY2016-2017Document8 pagesPhysics 71 Syllabus 2nd Sem AY2016-2017011100111No ratings yet
- Gravitational Field Tutorial PHY101Document7 pagesGravitational Field Tutorial PHY101kalahanmoonga82No ratings yet
- Week 7 Template PDFDocument15 pagesWeek 7 Template PDFAngelica LosaresNo ratings yet
- Internal Flows (Laminar Flow) : Lecture - 04Document25 pagesInternal Flows (Laminar Flow) : Lecture - 04غيث منعمNo ratings yet
- Mini Launcher Lab ReportDocument7 pagesMini Launcher Lab ReportMohammad AnasNo ratings yet
- All WavesDocument155 pagesAll WavesTenisha CastilloNo ratings yet
- Class Test 9th MotionDocument3 pagesClass Test 9th Motionsudhir_kumar_33100% (1)
- Module 2 Modern Physics & Quantum MechanicsDocument34 pagesModule 2 Modern Physics & Quantum Mechanicsgoutami SunthankarNo ratings yet
- Work, Power and EnergyDocument5 pagesWork, Power and EnergysinghashubhadeepNo ratings yet
- Pressure Distribution On A CylinderDocument7 pagesPressure Distribution On A CylinderSaahil Sankar BNo ratings yet
- Vibration AnalysisDocument31 pagesVibration AnalysisDinesh Mohitkar50% (2)