G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |i
A HANDBOOK ON THEORY & PRACTICE OF
GEOMETRIC DESIGN OF
HIGHWAYS & INTERSECTIONS
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons)
MCS (SL), Adv.Cert (IT)
Chartered Civil Engineer (SL & UK)
Professional Member of the Computer Society of Sri Lanka
Additional Director (Highway Design)
Road Development Authority
Visiting Lecturer
Institution of Engineers Sri Lanka
University of Moratuwa
University of Sri Jayawardhenepura
2024
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | ii
TABLE OF CONTENTS
TABLE OF CONTENTS .....................................................................................................................II
CHAPTER 01: PLANNING OF A NEW HIGHWAY ................................................................ 1
01.1 INTRODUCTION .....................................................................................................................1
01.2 DESK STUDY.........................................................................................................................1
01.2.1 Information Required .................................................................................................1
01.2.3 Sources of Information ............................................................................................... 1
01.2.4 Guideline to Select the Route......................................................................................2
01.3 RECONNAISSANCE SURVEY ..................................................................................................2
01.3.1 Items to be carried to the site .....................................................................................3
01.3.2 Activities to be carried out .........................................................................................3
01.3.3 Things to Note ............................................................................................................3
01.4 PRELIMINARY SURVEY .........................................................................................................4
01.4.1 Activities to be carried out .........................................................................................4
01.5 DETAILED SURVEY (FINAL LOCATION SURVEY) ..................................................................4
01.5.1 Activities to be carried out .........................................................................................4
CHAPTER 02: HIGHWAY CAPACITY & LEVEL OF SERVICE .........................................5
02.1 CAPACITY ANALYSIS ............................................................................................................5
02.2 LEVEL OF SERVICE (LOS).....................................................................................................5
02.3 CAPACITY DESIGN OF TWO-LANE HIGHWAYS ......................................................................6
02.3.1 Average Travel Speed .................................................................................................6
02.3.2 Percent Time Delay ....................................................................................................6
02.3.3 Capacity Utilization....................................................................................................7
02.3.4 Ideal Conditions for Two Lane Highways ..................................................................7
02.4 SERVICE FLOW RATE ............................................................................................................7
02.5 DETERMINATION OF LEVEL OF SERVICE ...............................................................................8
02.6 EFFECT OF GRADE ................................................................................................................4
02.7 SPECIMEN CALCULATIONS....................................................................................................5
CHAPTER 03: DESIGN OF HIGHWAY COMPONENTS ......................................................6
03.01 ROAD NETWORK CLASSIFICATION........................................................................................6
03.02 COMPONENTS OF A HIGHWAY .............................................................................................. 6
03.03 CARRIAGEWAY .....................................................................................................................7
03.03.1 Width of Carriageway ................................................................................................ 7
03.04 CENTRE MEDIAN ..................................................................................................................7
03.05 HARD SHOULDER..................................................................................................................8
03.06 SOFT SHOULDER ...................................................................................................................9
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | iii
03.07 SIDEWALKS .......................................................................................................................... 9
03.08 PEDESTRIAN CROSSINGS .....................................................................................................10
03.09 PARKING .............................................................................................................................11
03.09.1 Parallel Parking .......................................................................................................11
03.09.2 Perpendicular Parking .............................................................................................12
03.09.3 Angle Parking/Echelon Parking ...............................................................................12
03.10 ROAD SIGNS........................................................................................................................13
03.11 ROAD MARKINGS................................................................................................................14
03.11.1 Cat’s Eyes .................................................................................................................15
03.12 TURNING BAYS ...................................................................................................................15
03.13 CLIMBING LANES ................................................................................................................16
03.14 BICYCLE LANES ..................................................................................................................16
03.14.1 When to consider this Type of Facility .....................................................................16
03.14.2 Principal Planning Concerns with Bicycle Lanes ....................................................17
03.15 PASSING LANES ..................................................................................................................18
03.16 STREET LIGHTING ...............................................................................................................19
03.16.1 Advantages ...............................................................................................................19
03.16.2 Disadvantages ..........................................................................................................19
CHAPTER 04: SURVEYING ALONG THE ROAD CORRIDOR .........................................20
04.1 INTRODUCTION ...................................................................................................................20
04.2 SURVEYING CORRIDOR .......................................................................................................20
04.3 EXTENT TO BE SURVEYED ...................................................................................................20
04.4 DETAILED SURVEYING ........................................................................................................20
04.5 INTERSECTION SURVEYING .................................................................................................21
04.6 BRIDGES, RIVERS, CAUSEWAYS SURVEYING ......................................................................21
04.7 DRAFTING AND PRESENTATION OF POINT DATA .................................................................21
CHAPTER 05: TERRAIN MODELING USING CIVIL 3D....................................................23
05.1 INTRODUCTION ...................................................................................................................23
05.2 SURFACE CREATION USING A POINT FILE (.CSV) .................................................................23
05.2.1 Break Lines ...............................................................................................................28
05.2.2 Boundary ..................................................................................................................29
05.3 SURFACE CREATION USING A POINT FILE (.TXT) .................................................................30
05.4 SURFACE CREATION USING CONTOURS ..............................................................................31
05.5 SURFACE CREATION USING EMBEDDED DATA ....................................................................33
05.6 EXPORTING THE SURFACE TO LANDXML FORMAT ............................................................35
CHAPTER 06: SIGHT DISTANCE ...........................................................................................36
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | iv
06.1 INTRODUCTION ................................................................................................................... 36
06.2 CONSTANTS USED FOR SIGHT DISTANCE ............................................................................ 36
06.3 STOPPING SIGHT DISTANCE ................................................................................................ 37
06.3.1 Effect of Grade in Breaking ...................................................................................... 38
06.4 OVERTAKING SIGHT DISTANCE .......................................................................................... 38
06.5 CONTINUATION SIGHT DISTANCE ....................................................................................... 39
CHAPTER 07: THEORY OF HORIZONTAL ALIGNMENT ............................................... 41
07.01 INTRODUCTION ................................................................................................................... 41
07.02 CIRCULAR HORIZONTAL CURVE PARAMETERS................................................................... 41
07.03 MINIMUM RADIUS OF THE HORIZONTAL CURVE................................................................. 43
07.04 SIDE FRICTION FACTOR ...................................................................................................... 44
07.05 DESIGN OF HORIZONTAL ALIGNMENT – GENERAL CONSIDERATIONS ................................ 45
07.06 HORIZONTAL CURVATURE.................................................................................................. 45
07.07 SIMPLE CIRCULAR CURVES ................................................................................................ 46
07.07.1 Adverse Crossfall ..................................................................................................... 47
07.08 TRANSITION CURVES .......................................................................................................... 48
07.09 COMPOUND CURVES ........................................................................................................... 49
07.10 REVERSE CURVES ............................................................................................................... 50
07.11 SIMILAR CURVES ................................................................................................................ 50
07.12 WIDENING OF CARRIAGEWAY ON CURVES ......................................................................... 51
CHAPTER 08: DESIGN OF HORIZONTAL ALIGNMENT ................................................. 54
08.1 INTRODUCTION ................................................................................................................... 54
08.2 STARTING AN ALIGNMENT IN CIVIL 3D .............................................................................. 54
08.3 FIRST ELEMENT OF THE ALIGNMENT .................................................................................. 56
08.4 DESIGN OF A SIMPLE CIRCULAR CURVE ............................................................................. 56
08.4.1 Tangent-Tangent (No Curve) Method ...................................................................... 57
08.4.2 Floating Curve (From Entity, Radius, Through Point) Method ............................... 59
08.4.3 Floating Line ............................................................................................................ 60
08.5 DESIGN OF COMPOUND CURVES ......................................................................................... 61
08.6 DESIGN OF REVERSE CURVES ............................................................................................. 61
08.7 DESIGN OF TRANSITION CURVES ........................................................................................ 61
08.8 QUICK PROFILE FUNCTION TO AID THE ALIGNMENT DESIGN .............................................. 62
08.9 DESIGN CENTRE LINE LABELS............................................................................................ 62
08.10 DESIGN CENTRE LINE COORDINATES ................................................................................. 63
CHAPTER 09: THEORY OF SUPERELEVATION................................................................ 65
09.1 INTRODUCTION ................................................................................................................... 65
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |v
09.2 SUPERELEVATION STANDARDS ...........................................................................................66
09.3 AXIS OF ROTATION .............................................................................................................66
09.4 SUPERELEVATION DEVELOPMENT LENGTH ........................................................................66
09.4.1 Relative Gradient Method.........................................................................................67
09.4.1 Rate of Pavement Rotation Method ..........................................................................67
09.5 SUPERELEVATION DEVELOPMENT FOR DIFFERENT CURVES ...............................................68
09.5.1 Superelevation Development for a Simple Circular Curve ......................................69
09.5.2 Superelevation Development for a Reverse Curve ...................................................70
09.5.3 Superelevation Development for a Closely Spaced Reverse Curve ..........................71
09.5.4 Superelevation Development for a Compound or Closely Spaced Compound Curve
72
CHAPTER 10: DESIGN OF SUPERELEVATION ..................................................................74
10.1 INTRODUCTION ...................................................................................................................74
10.2 SUPERELEVATION TERMINOLOGY IN CIVIL 3D ...................................................................74
10.3 ENTERING SUPERELEVATION VALUES (MANUAL METHOD) ...............................................75
10.4 ENTERING SUPERELEVATION VALUES (USING SUPEL-1000C EXCEL SHEET) ....................76
CHAPTER 11: THEORY OF VERTICAL ALIGNMENT ......................................................79
11.1 INTRODUCTION ...................................................................................................................79
11.2 GENERAL CONSIDERATIONS ...............................................................................................79
11.3 VERTICAL CURVES .............................................................................................................79
11.4 CREST VERTICAL CURVES ..................................................................................................80
11.4.1 General .....................................................................................................................80
11.4.2 Sight Distance Criterion ...........................................................................................81
11.4.3 Appearance Criterion ...............................................................................................83
11.4.4 Comfort Criterion .....................................................................................................83
11.4.5 Drainage Criterion ...................................................................................................84
11.4.6 Allowable Grade Change without a Vertical Curve .................................................84
11.5 SAG VERTICAL CURVES ......................................................................................................84
11.5.1 General .....................................................................................................................84
11.5.2 Sight Distance Criterion based on Head Light Criterion .........................................85
11.5.3 Sight Distance Criterion based on Overhead Obstruction Criterion .......................87
11.5.4 Appearance Criterion ...............................................................................................87
11.5.5 Comfort Criterion .....................................................................................................87
11.5.6 Drainage Criterion ...................................................................................................87
11.5.7 Allowable Grade Change without a Vertical Curve .................................................87
11.6 GRADES ..............................................................................................................................88
11.7 STANDARDS FOR GRADES ...................................................................................................88
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | vi
11.7.1 General ..................................................................................................................... 88
11.7.2 General Maximum Grades ....................................................................................... 88
11.7.3 Minimum Gradients .................................................................................................. 89
11.7.4 Grades Steeper than General Maximum .................................................................. 89
CHAPTER 12 DESIGN OF VERTICAL ALIGNMENT ....................................................... 90
12.1 INTRODUCTION ................................................................................................................... 90
12.2 OFFSET METHOD OF SURFACE CREATION .......................................................................... 90
12.2.1 Introduction .............................................................................................................. 90
12.2.2 Surface File for Vertical Alignment .......................................................................... 90
12.2.3 Data filtering for TE ................................................................................................. 91
12.2.4 Importing Level Data and VA Surface Creation ...................................................... 95
12.3 CREATING THE EXISTING PROFILE ...................................................................................... 96
12.3 CREATING THE RECAMBERING PROFILE ............................................................................. 99
12.3.1 Introduction .............................................................................................................. 99
12.3.2 Creating the Recambering Assembly ........................................................................ 99
12.3.3 Creating the Existing Tar Edges and Design Lane Edges Alignments ................... 102
5.3.4 Creating the Recambering Corridor ........................................................................... 103
12.3.5 Creating the Recambering Surface ......................................................................... 107
5.3.6 Adding the Recambering Surface to the Profile View ................................................. 108
12.4 DESIGN OF VERTICAL ALIGNMENT ................................................................................... 108
12.4.1 Drawing Initial Profile View .................................................................................. 108
12.4.2 Adding Vertical Curves to the Profile .................................................................... 110
12.4.3 Correcting the Profile View Labels and fine tuning ............................................... 111
CHAPTER 13: HARMONIZATION OF DESIGNS .............................................................. 113
13.1 GENERAL .......................................................................................................................... 113
13.2 COORDINATION OF HORIZONTAL AND VERTICAL ALIGNMENTS FOR SAFETY ................... 113
13.3 COORDINATION OF HORIZONTAL AND VERTICAL ALIGNMENTS FOR AESTHETIC
CONSIDERATION ............................................................................................................................. 113
13.4 GRAPHICAL ILLUSTRATIONS OF GOOD AND POOR COMBINATIONS .................................. 114
CHAPTER 14 DRAWING SHEET GENERATION ............................................................. 115
14.1 INTRODUCTION ................................................................................................................. 115
14.2 CREATING VIEW FRAMES ................................................................................................. 115
14.3 CREATING SHEETS ............................................................................................................ 117
CHAPTER 15 DESIGN CROSS SECTIONS......................................................................... 120
15.1 INTRODUCTION ................................................................................................................. 120
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | vii
15.2 CREATING THE BASIC ASSEMBLY .....................................................................................120
15.3 CREATING THE ASSEMBLY: EXISTING ROAD ....................................................................121
15.4 CREATING THE ASSEMBLY: WIDENING SECTION ..............................................................122
15.5 CREATING THE ASSEMBLY: SHOULDERS...........................................................................123
15.6 CREATING THE ASSEMBLY: DRAINS .................................................................................124
15.7 CREATING THE ASSEMBLY: DAYLIGHT ............................................................................125
15.8 CREATING THE CORRIDOR ................................................................................................126
15.9 CREATING THE SAMPLE LINES ..........................................................................................128
15.10 CREATING THE CROSS SECTIONS ......................................................................................129
CHAPTER 16 MATERIAL CALCULATIONS ....................................................................131
16.1 INTRODUCTION .................................................................................................................131
16.2 EARTH WORK CALCULATIONS..........................................................................................131
16.3 ROAD MATERIAL CALCULATIONS ....................................................................................135
CHAPTER 17: INTRODUCTION TO INTERSECTION DESIGN .....................................140
17.1 AT GRADE INTERSECTIONS ...............................................................................................140
17.2 TYPES OF INTERSECTION ...................................................................................................140
17.2.1 Right Angle Intersection .........................................................................................141
17.2.2 Skewed Intersection ................................................................................................141
17.2.3 T-Type Intersection .................................................................................................142
17.2.4 Y-Type Intersection .................................................................................................142
17.2.5 Multi Leg Intersection ............................................................................................143
17.3 TYPICAL INTERSECTION CONFIGURATIONS.......................................................................143
17.3 TYPES OF CONFLICTS ........................................................................................................144
17.3.1 Cross Conflict .........................................................................................................144
17.3.2 Merge Conflict ........................................................................................................144
17.3.3 Diverge Conflict .....................................................................................................145
17.3.4 Weaving Conflict ....................................................................................................145
17.4 CONFLICT POINTS .............................................................................................................145
17.4.1 Conflict Points in a 4 Leg Intersection ...................................................................145
17.4.2 Conflict Points in a 3 Leg Intersection ...................................................................146
17.4.3 Conflict Points in a Roundabout.............................................................................146
17.5 MAIN METHODS OF INTERSECTION CONTROL ..................................................................146
17.5.1 Unchannelized Unflared (Simple) Intersections .....................................................147
17.5.2 Flared Intersections ................................................................................................147
17.5.3 Channelized Intersections .......................................................................................148
17.5.4 Roundabouts ...........................................................................................................149
17.5.5 Signalized Intersections ..........................................................................................150
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | viii
CHAPTER 18: THEORY OF ROUNDABOUTS ................................................................... 151
18.1 INTRODUCTION ................................................................................................................. 151
18.2 TYPES OF ROUNDABOUTS ................................................................................................. 151
18.2.1 Mini Roundabouts .................................................................................................. 151
18.2.2 Small Roundabouts ................................................................................................. 152
18.2.3 Double Roundabouts .............................................................................................. 152
18.2.4 Conventional Roundabouts .................................................................................... 153
18.3 ELEMENTS OF A ROUNDABOUT ......................................................................................... 153
18.3.01 Central Island ......................................................................................................... 155
18.3.02 Central Island Diameter ......................................................................................... 155
18.3.03 Inscribed Circle Diameter ...................................................................................... 155
18.3.04 Circulating Carriageway ........................................................................................ 155
18.3.05 Circulating Carriageway Width ............................................................................. 155
18.3.06 Circulating Carriageway Width ............................................................................. 155
18.3.07 Entry Curve ............................................................................................................ 155
18.3.08 Exit Curve ............................................................................................................... 155
18.3.09 Approach Width ...................................................................................................... 155
18.3.10 Entry/Exit Width ..................................................................................................... 155
18.3.11 Departure Width ..................................................................................................... 155
18.3.12 Corner Kerb Radius (Kerb Return) ........................................................................ 156
18.3.13 Splitter Island ......................................................................................................... 156
18.4 GAP ACCEPTANCE THEORY .............................................................................................. 156
18.5 CAPACITY ANALYSIS PROCEDURE .................................................................................... 156
18.6 WORKED EXAMPLE IN AUSTROADS .............................................................................. 157
18.6.01 Assemble Traffic Data ............................................................................................ 157
18.6.02 Determine the Number of Entry and Circulating Lanes ......................................... 158
18.6.03 Record the Geometric Values ................................................................................. 159
18.6.04 Classify the Entry Lane Type .................................................................................. 160
18.6.05 Estimate the Critical Gap Acceptance Parameters ................................................ 160
18.6.06 Estimate the Characteristics of the Circulating Traffic .......................................... 163
18.6.07 Calculate Absorption Capacity and Degree of Saturation ..................................... 165
CHAPTER 19 ROUNDABOUT DESIGN .............................................................................. 167
19.01 INTRODUCTION ................................................................................................................. 167
19.02 TRAFFIC DATA.................................................................................................................. 167
19.03 CREATING A PROJECT IN SIDRA INTERSECTION .............................................................. 167
19.04 INTERSECTION TREATMENT .............................................................................................. 167
19.05 ROUNDABOUT TYPE ......................................................................................................... 167
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | ix
19.06 SITE INPUT: INTERSECTION ...............................................................................................168
19.07 SITE INPUT: MOVEMENT DEFINITIONS ..............................................................................168
19.08 SITE INPUT: LANE GEOMETRY ..........................................................................................168
• 19.08.1 Lane Configurations............................................................................................168
• 19.08.2 Lane Disciplines ..................................................................................................169
• 19.08.3 Lane Data ............................................................................................................169
19.09 SITE INPUT: LANE MOVEMENTS .......................................................................................170
19.10 SITE INPUT: ROUNDABOUTS..............................................................................................170
• 19.10.1 Roundabout Options............................................................................................170
• 19.10.1 Roundabout Data ................................................................................................170
10.11 SITE INPUT: PEDESTRIAN MOVEMENT DATA ....................................................................171
19.12 SITE INPUT: VOLUMES ......................................................................................................171
19.13 SITE INPUT: GAP ACCEPTANCE DATA ...............................................................................172
19.14 SITE INPUT: VEHICLE MOVEMENT DATA ..........................................................................172
19.15 SITE INPUT: VEHICLE MOVEMENT DATA ..........................................................................173
19.16 SITE INPUT: SITE DEMAND & SENSITIVITY .......................................................................173
19.17 SITE INPUT: PARAMETER SETTINGS ..................................................................................173
19.18 SITE OUTPUT ....................................................................................................................173
CHAPTER 20: THEORY OF TRAFFIC SIGNALS ..............................................................174
20.1 INTRODUCTION .................................................................................................................174
20.2 TYPES OF TRAFFIC SIGNALS .............................................................................................174
20.2.1 Fixed Time Signals .................................................................................................174
20.2.2 Semi Actuated Signals ............................................................................................174
20.2.3 Fully Actuated Signals ............................................................................................175
20.3 WARRANTS FOR TRAFFIC SIGNALS ...................................................................................175
20.3.1 Warrant 1: Minimum Vehicular Traffic ..................................................................175
20.3.2 Warrant 2: Interruptions of Continuous Traffic .....................................................176
20.3.3 Warrant 3: Minimum Pedestrian Volume ...............................................................176
20.3.4 Warrant 4: School Crossings..................................................................................176
20.3.5 Warrant 5: Progressive Movement .........................................................................176
20.3.6 Warrant 6: Accident Experience ............................................................................176
20.3.7 Warrant 7: Systems .................................................................................................177
20.3.8 Warrant 8: Systems .................................................................................................177
20.4 METHOD OF CAPACITY ANALYSIS ....................................................................................177
20.5 BASIC MODEL AND DEFINITIONS ......................................................................................178
20.5.1 Basic Model ............................................................................................................178
20.5.2 Movement ...............................................................................................................178
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |x
20.5.3 Phase ...................................................................................................................... 178
20.5.4 Cycle ....................................................................................................................... 179
20.5.5 Cycle Length ........................................................................................................... 179
20.5.6 Green Interval ........................................................................................................ 179
20.5.7 Red Interval ............................................................................................................ 179
20.5.8 Lost Interval ........................................................................................................... 179
20.6 SIGNAL TIMING CALCULATIONS AND CAPACITY ANALYSIS ............................................. 179
20.6.1 General ................................................................................................................... 179
20.6.2 Measurement of Saturation Flow ........................................................................... 180
20.7 SELECTION OF BASE SATURATION FLOW.......................................................................... 180
20.7.1 Base Saturation Flow ............................................................................................. 180
20.7.2 Environmental Classes ........................................................................................... 181
20.7.3 Lane Types.............................................................................................................. 181
20.8 ADJUSTMENT FACTORS TO THE BASE SATURATION FLOW ............................................... 181
20.8.1 Lane Width Factor.................................................................................................. 181
20.8.2 Gradient Factor ...................................................................................................... 182
20.8.3 Traffic Composition Factor .................................................................................... 182
20.8.4 Types of Vehicles .................................................................................................... 182
20.8.5 Types of Turns ........................................................................................................ 183
20.9 CRITICAL MOVEMENT SEARCH TABLE AND DIAGRAM ..................................................... 183
20.10 CYCLE TIME ..................................................................................................................... 183
20.10.1 Optimum Cycle Time .............................................................................................. 183
20.10.2 Practical Cycle Time .............................................................................................. 184
20.10.3 Minimum Displayed Green Time (Gm) ................................................................... 184
20.11 DELAY CALCULATIONS .................................................................................................... 184
20.12 SELECTION OF LAYOUT .................................................................................................... 184
20.13 DIFFERENT PHASE DIAGRAMS AND JUNCTION LAYOUTS .................................................. 184
20.14 WORKED EXAMPLE .......................................................................................................... 186
20.14.1 STEP 1: SELECT A GEOMETRIC LAYOUT ....................................................................... 186
20.14.2 STEP 2: SELECT THE PHASE ARRANGEMENT ................................................................ 187
20.14.3 STEP 3: SELECT THE BASE SATURATION FLOW ............................................................ 187
20.14.4 STEP 4: ADJUST THE BASE SATURATION FLOW APPLYING LANE WIDTH FACTOR AND
GRADIENT FACTOR ......................................................................................................................... 188
20.14.5 STEP 5: PERFORM TRAFFIC COMPOSITION ADJUSTMENTS AND FIND THE SATURATION
FLOW (SVEH) .................................................................................................................................... 188
20.14.6 STEP 6: FIND THE CRITICAL MOVEMENTS AND DRAW THE CRITICAL MOVEMENT
SEARCH DIAGRAM .......................................................................................................................... 188
20.14.7 STEP 7: DRAW THE REDUCED CRITICAL MOVEMENT SEARCH DIAGRAM .................... 191
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | xi
CHAPTER 21 SIGNALIZED INTERSECTION DESIGN ...................................................193
21.01 INTRODUCTION .................................................................................................................193
21.02 TRAFFIC DATA ..................................................................................................................193
21.03 CREATING A PROJECT IN SIDRA INTERSECTION...............................................................193
21.04 INTERSECTION TREATMENT ..............................................................................................193
21.05 INTERSECTION TYPE .........................................................................................................193
21.06 SITE INPUT: INTERSECTION ...............................................................................................195
21.07 SITE INPUT: MOVEMENT DEFINITIONS ..............................................................................198
21.08 SITE INPUT: LANE GEOMETRY ..........................................................................................199
21.08.1 Lane Configurations ...............................................................................................199
21.08.2 Lane Disciplines .....................................................................................................204
21.08.3 Lane Data ...............................................................................................................205
21.09 SITE INPUT: LANE MOVEMENTS .......................................................................................205
21.10 SITE INPUT: PEDESTRIAN MOVEMENT DATA ....................................................................206
21.11 SITE INPUT: VOLUMES ......................................................................................................207
21.12 SITE INPUT: PRIORITIES ....................................................................................................207
21.13 SITE INPUT: GAP ACCEPTANCE .........................................................................................207
21.14 SITE INPUT: VEHICLE MOVEMENT DATA ..........................................................................207
21.15 SITE INPUT: PHASING & TIMING .......................................................................................208
21.16 SITE OUTPUT: DIAGNOSTICS .............................................................................................212
21.17 SITE OUTPUT: OTHER DETAILS .........................................................................................212
21.17.1 Lane Level of Service ..............................................................................................212
21.18 GEOMETRIC DESIGN OF THE INTERSECTION ......................................................................214
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |1
CHAPTER 01: PLANNING OF A NEW HIGHWAY
01.1 Introduction
Planning of a new highway involves the activities and processes in selecting the best
route for the new highway considering economic, environmental and social impacts.
Sustainability aspects of the new highway are crucial in selecting a route. Conventional
planning involves 04 distinct phases of planning a new highway.
• Desk Study
• Preliminary Survey
• Reconnaissance Survey
• Detailed Survey (Final Location Survey)
01.2 Desk Study
A desk study involves the study and review of existing information about a site through
resources such as maps and other documentary records already available. It is carried out
as the first stage of site investigation. In this study, all the information about the area, in
which the road is supposed to run are collected and studied at the office. Based on these
data, few alternative routes can be identified.
01.2.1 Information Required
The information required for this stage are as follows;
• Topography of the area
• Population and employment information
• Human settlements in the area
• Important locations (schools, temples, government offices, hospitals)
• Information of locations of natural hazards (earth slips etc)
01.2.3 Sources of Information
Following are the sources of information in this stage;
• Topographical –Department of surveys, topographical maps (1: 50000, 1: 10000)
• Aerial photographs
• Other detailed maps (1:5000, 1:10000, 1:2000)
• Digital information like Google Earth.
• GIS geographical information systems, satellite images.
• Population/Employment
• Department of Census and Statistics
• Population and no. of households.
• Divisional secretariat offices.
• Other places to visit for information are:
• Local RDA offices
• Police stations
• Department of Irrigation
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |2
Figure 1.1: A Snapshot of a Highway Trace drawn on the Google Map
01.2.4 Guideline to Select the Route
After collecting this information, the planner should study the information gathered. In
the desk study, several alternative routes to connect the two points are selected.
• Route should be as short as possible.
• Try to provide/improve accessibility to as much as human settlements possible.
• Try to reduce earthwork (cutting/filling) as much as possible.
• Try to maintain easy grades and curves.
• Avoid bridges and tunnels as much as possible.
• Try to avoid areas that are prone to natural hazards.
• Try to maintain good sight distance
• Look for the suitable bridge sights
• Look for ways of handling drainage
• Look for the availability of construction materials in the locality.
01.3 Reconnaissance Survey
Carried out as an extensive study of an entire area, the reconnaissance survey is the
second step of selecting a route for a new highway. Its purpose can be broadly described
as the elimination of routes or sites which are impractical or unfeasible. Several routes
initially identified in the desk study are dropped in this phase due to the impracticality or
the unfeasibility. In this phase, the planner is expected to visit the site for the first time.
They are expected to verify the details gathered in the desk study in such site visits.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |3
Figure 1.2: Collecting Details at Site for the Route Selection
01.3.1 Items to be carried to the site
• Map showing all the alternative routes selected in the desk study (Google map
opened in the laptop if the signal is available)
• A field note book
• Measuring tape (linen tape 30m)
• 2 or 3 poles
• A compass
• Camera
• Binocular
• Mobile phone
• Bottle of water
• Snacks
• Rough shoes/clothing
• Knife
01.3.2 Activities to be carried out
• Accompany with you a person who is familiar with the area.
• Always inform the police/GS and local road authority about the visit.
• Discuss with the locals, postmaster, school principal, doctor at the dispensary,
Grama Seva Niladhari etc.
• Walk along the selected alternative routes, while taking down field notes.
• Take photographs and shoot videos where necessary.
• Locate the important places in the Google Maps using GPS
01.3.3 Things to Note
• A rough chainage
• Location of the buildings, stream crossings, slopes and rocks, boundaries of lands,
• At stream crossings, measure the span and the depth.
• Observe the banks.
• Take a scaled photograph, measure the depth of water and average flow, depth of
water during floods.
• Sketch the stream 50m upstream and 50m downstream
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |4
• Some record of the land use information on either side of the road to be taken
down.
• Observe places which are known for natural hazards.
• Especially take down the information that are different to what have been gathered
during the desk study.
• Note down the availability of construction materials in the locality. (Estimate the
quantities)
It is necessary to repeat the same procedure for all the alternative routes. At the end of the
reconnaissance survey, few of the alternative routes should be selected. More promising
alternatives selected during the reconnaissance survey are to be investigated further
during the preliminary survey.
01.4 Preliminary Survey
The preliminary survey is basically the detailed instrumental examination of the route to
be selected after the reconnaissance survey, in order to estimate the cost of the proposed
highway. In this phase either there can be a single trace for further study or few traces to
select based on traffic data and the cost component. Most of the traces selected for study
in earlier phases are now being abandoned. At the end of the preliminary survey, the most
promising alternative is identified for detailed survey
01.4.1 Activities to be carried out
• A traverse and a level line along the selected routes.
• Contour surveys at stream crossings.
• Estimate the number of lands to be acquired more precisely.
• Some adjustment to the route can be made considering the actual boundaries of
blocks of lands, location of important structures, natural barriers, easing of curves
etc.
01.5 Detailed Survey (Final Location Survey)
The last phase the detailed Survey or the Final Location Survey is carried out only upon
the decision has been taken to construct the particular highway. This survey is carried out
to prepare the accurate cost estimates and the working drawings necessary for
construction.
01.5.1 Activities to be carried out
• All the measurements that are needed to prepare the BOQ are to be made.
• Same survey repeated again at 20m to a 50m either side (shorter interval, longer
distance)
• Geotechnical engineer also comes to the scene.
• You have to test the soil, do CBR tests etc.
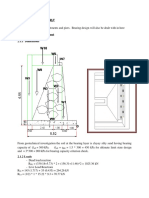
• At intervals, you have to check the bearing capacity.
• Soil and rock tests to be carried out to check whether the sub grade is strong
enough to carry the load.
• Geotechnical engineer visits the sites to identify whether there are any problems
with bridge foundation.
• At the end of the detailed survey, final design drawings can be prepared.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |5
CHAPTER 02: HIGHWAY CAPACITY & LEVEL OF SERVICE
02.1 Capacity Analysis
Capacity Analysis is a set of procedures used to estimate the traffic carrying capacity of
facilities over a range of defined operational conditions. Capacity is defined as the
maximum hourly rate at which vehicles (or persons) can reasonably be expected to
traverse a point or a uniform section of a lane or roadway during a given time period
under prevailing roadway, traffic and control conditions. Highway Capacity Manual
published by the Transport Research Board (USA) is used to design and plan highways.
02.2 Level of Service (LOS)
The concept of Level of Service (LOS) is the different operational qualities of the traffic
flow. Level of Service is a qualitative measure of speed and travel time, freedom to
manoeuvres, traffic interruption, driving comfort, convenience, safety and operating cost.
Six Levels of Service are categorized from A to F and it covers entire range of traffic
condition which may occur.
• Level of Service A – Free flow with high speed and low volumes. Drivers can
hold their desired speeds without delays.
• Level of Service B – Reasonably free flow. Stable flow and drivers have
reasonable freedom to select their speed.
• Level of Service C – Stable flow. Most drivers are restricted in their freedom to
select their own speed, change lanes, overtake etc... But operating speeds are still
reasonable.
• Level of Service D – Approaches unstable flow with nearly all drivers restricted.
Comfort and convenience are low but may be tolerated for short periods.
Fluctuations in conditions cause substantial drops in speed. As this service volume
corresponds to what is referred as tolerable capacity, this level of service should
be used to determine the upper limit of traffic demand which should be tolerated.
• Level of Service E – Unstable flow and there may be momentary stoppages. This
LOS is obtained with traffic volumes with near or at capacity.
• Level of Service F – Forced or breakdown flow operating at low speed caused by
the demand exceeding capacity. There is stop-start operation with large queues
and delays. In the extreme both speed and volume can drop to zero.
New roads are normally designed for LOS C or even D.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |6
Figure 2.1: A Graphical Illustration of the LOS
02.3 Capacity Design of Two-Lane Highways
A two lane highway is a two lane road having one lane for use by traffic in each direction.
Passing of slower vehicles require the use of opposing lanes when sight distances and
gaps in opposing traffic stream warrant.
As volume increases, the ability to pass decreases and results in formation of platoons in
the traffic stream.
Three parameters are used to describe service quality for two lane highways.
• Average travel speed
• Percent time delay
• Capacity utilization
02.3.1 Average Travel Speed
This reflects the mobility function of two-lane highways and is the length of the highway
segment under consideration divided by the average travel time of all vehicles traversing
the segment over some designated interval of time.
02.3.2 Percent Time Delay
This reflects both mobility and access function and is defined as the average percent of
time that all vehicles are delayed while traveling in platoons due to their inability to pass.
Percent time delay is difficult to measure directly in the field. The percent of vehicles
traveling at headways less than 5 seconds can be used as a substitute measure in field
studies.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |7
02.3.3 Capacity Utilization
This reflects the access function and is defined as the ratio of the demand flow rate to the
capacity of the facility.
02.3.4 Ideal Conditions for Two Lane Highways
• Design speed is greater than or equal to 96kmph
• Lane width is greater than or equal to 3.7m
• Clear shoulder width is greater than or equal to 1.8m
• No ‘No passing zones’ in the highway
• Only passenger cars in the traffic stream
• A 50/50 directional distribution of traffic.
• No impediment to through traffic dye to traffic control or turning vehicles.
• Level terrain.
The capacity of a two lane highway under ideal conditions is 2800 pcph total in both
directions.
A ‘No passing zone’ is defined as one marked for no passing or any road section where
the passing sight distance 450m or less.
02.4 Service Flow Rate
Service flow rate is the maximum rate of flow which can be accommodated by various
facilities at each level of service A to E. It is the maximum hourly rate under prevailing
conditions while maintaining the designed level of service.
To calculate the service flow rate, following equations are applied.
V
SFi = 2800 ( ) f d f w f HV
C
1
f HV =
1 + PT ( ET − 1) + PB ( EB − 1)
V
v=
PHF
Where:
SFi = Total service flow rate in both directions for prevailing roadway and Traffic
conditions, for level of service i, in vph
(v/c)I = Ratio of flow rate to ideal capacity for level of service i, obtained from Table 8-
1
fd = Adjustment factor for directional distribution of traffic, obtained from
Table 5.2 In the absence of directional distribution factor, it is better to use 60/40 as the
directional distribution factor
fw = Adjustment factor for narrow lanes and restricted shoulder width, obtained
from Table 5.3
fHV = Adjustment factor for the presence of heavy vehicles in the traffic stream
PT = Proportion of trucks in the traffic stream, expressed as a decimal
PB = Proportion of buses in the traffic stream, expressed as a decimal
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |8
ET, EB = Passenger car equivalent for trucks and buses obtained from Table 5.4
v = Flow rate for 15 minutes total flow for both directions in vph
V = Full hour volume total for both directions in vph
PHF = Peak hour factor
02.5 Determination of Level of Service
LOS of a given facility under existing conditions or projected traffic demand can be
determined by above equations and the tables given below. These tables are extracted
from Highway Capacity Manual, Transport Research Board, National Research Council,
Washington DC, USA
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |9
Table 2.1: Level of Service Criteria for General Two-Lane Highway Segments V/C Ratio (ratio of Flow Rate to an Ideal Capacity of 2800pcph
in both Directions)
LOS Percent Level Terrain Rolling Terrain Mountainous Terrain
time delay Average1 % No passing zones Average % No passing zones Average % No passing zones
speed 0 20 40 60 80 100 speed 0 20 40 60 80 100 speed 0 20 40 60 80 100
A ≤ 30 ≥ 94 0.15 0.12 0.09 0.07 0.05 0.04 ≥ 92 0.15 0.10 0.07 0.05 0.04 0.03 ≥ 90 0.14 0.09 0.07 0.04 0.02 0.01
B ≤ 45 ≥ 89 0.27 0.24 0.21 0.19 0.17 0.16 ≥ 87 0.26 0.23 0.19 0.17 0.15 0.13 ≥ 87 0.25 0.20 0.16 0.13 0.12 0.10
C ≤ 60 ≥ 84 0.43 0.39 0.36 0.34 0.33 0.32 ≥ 82 0.42 0.39 0.35 0.32 0.30 0.28 ≥ 79 0.39 0.33 0.28 0.23 0.20 0.16
D ≤ 75 ≥ 81 0.64 0.62 0.60 0.59 0.58 0.57 ≥ 79 0.62 0.57 0.52 0.48 0.46 0.43 ≥ 73 0.58 0.50 0.45 0.40 0.37 0.33
E >75 ≥ 73 1.00 1.00 1.00 1.00 1.00 1.00 ≥ 65 0.97 0.94 0.92 0.91 0.9 0.90 ≥ 57 0.91 0.87 0.84 0.82 0.80 0.78
F 100 < 45 - - - - - - < 40 - - - - - - < 35 - - - - - -
1
Average travel speed of all vehicles with highway design speeds ≥ 96kmph; for highways with lower design speeds reduce speed by 6kmph for each 16kmph reduction of
design speed below 96kmph; assume speed is not restricted to lower values by regulation
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |1
Table 2.2: Adjustment Factors for Directional Distribution (fd) for Two Lane Highways
Directional Distribution
100/0 90/10 80/20 70/30 60/40 50/50
Adjustment Factor, fd
0.71 0.75 0.83 0.89 0.94 1.00
Table 2.3: Adjustment Factors for Combined Effect of Narrow Lanes and Restricted
Shoulder Width (fw)
3.7 m Lanes 3.4 m Lanes 3.0 m Lanes 2.7 m Lanes
Usable
Shoulder LOS LOS LOS LOS LOS LOS LOS LOS
Width A-D E A-D E A-D E A-D E
(m)
>=1.8 1.00 1.00 0.93 0.94 0.84 0.87 0.70 0.76
1.2 0.92 0.97 0.85 0.92 0.77 0.85 0.65 0.74
0.6 0.81 0.93 0.75 0.88 0.68 0.81 0.57 0.70
0 0.70 0.88 0.65 0.82 0.58 0.75 0.49 0.66
Table 2.4: Average Passenger Car Equivalent for Trucks and Busses on Two Lane
Highways over different Terrain Segments
Vehicle Type Level of Service Type of Terrain
Level Rolling Mountainous
A 2.0 4.0 7.0
Trucks, ET B and C 2.2 5.0 10.0
D and E 2.0 5.0 12.0
A 1.8 3.0 5.7
Buses, EB B and C 2.0 3.4 6.0
D and E 1.6 2.9 6.5
Table 2.5: Values of V/C Ratios Vs Speed, Percent Grade and Percent No Passing Zones
for Specific Grades
Percent Grade Average upgrade speed (kmph) Percent ‘No Passing Zones’
0 20 40 60 80 100
89 0.27 0.23 0.19 0.17 0.14 0.12
85 0.42 0.38 0.33 0.31 0.29 0.27
81 0.64 0.59 0.55 0.52 0.49 0.47
3
73 1.00 0.95 0.91 0.88 0.86 0.84
69 1.00 0.98 0.97 0.96 0.95 0.94
65 1.00 1.00 1.00 1.00 1.00 1.00
89 0.25 0.21 0.18 0.16 0.13 0.11
4 85 0.40 0.36 0.31 0.29 0.27 0.25
81 0.61 0.56 0.52 0.49 0.47 0.45
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |2
73 0.97 0.92 0.88 0.85 0.83 0.81
69 0.99 0.96 0.95 0.94 0.93 0.92
65 1.00 1.00 1.00 1.00 1.00 1.00
89 0.21 0.17 0.14 0.12 0.10 0.08
85 0.36 0.31 0.27 0.24 0.22 0.20
81 0.57 0.49 0.45 0.41 0.39 0.37
5 73 0.93 0.84 0.79 0.75 0.72 0.70
69 0.97 0.90 0.87 0.85 0.83 0.82
65 0.98 0.96 0.95 0.94 0.93 0.92
57 1.00 1.00 1.00 1.00 1.00 1.00
89 0.12 0.10 0.08 0.06 0.05 0.04
85 0.27 0.22 0.18 0.16 0.14 0.13
81 0.48 0.40 0.35 0.31 0.28 0.26
73 0.49 0.76 0.68 0.63 0.59 0.55
6
69 0.93 0.84 0.78 0.74 0.70 0.67
65 0.97 0.91 0.87 0.83 0.81 0.78
57 1.00 0.96 0.95 0.93 0.91 0.90
49 1.00 0.99 0.99 0.98 0.98 0.98
89 0.00 0.00 0.00 0.00 0.00 0.00
85 0.13 0.10 0.08 0.07 0.05 0.04
81 0.34 0.27 0.22 0.18 0.15 0.12
73 0.77 0.65 0.55 0.46 0.40 0.35
7
69 0.86 0.75 0.67 0.60 0.54 0.48
65 0.93 0.82 0.75 0.69 0.64 0.59
57 1.00 0.91 0.87 0.82 0.79 0.76
49 1.00 0.95 0.92 0.90 0.88 0.86
Table 2.6: Adjustment Factors for Directional distribution for Specific Grades (fd)
Percent of traffic on upgrade Adjustment factor (fd)
100 0.58
90 0.64
80 0.70
70 0.78
60 0.87
50 1.00
40 1.20
30 1.50
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |3
Table 2.7: Passenger Car Equivalent for Specific Grades on Two Lane Highways E and E0
Grade % Length of grade (m) Average upgrade speed (kmph)
73 64 48
0 All 1.4 1.3 1.3
3 400 1.7 1.6 1.5
800 2.0 1.8 1.7
1200 2.3 2.0 1.9
1600 2.6 2.3 2.1
2400 3.4 2.9 2.5
3200 4.6 3.7 2.9
4800 7.3 5.6 3.8
6400 11.3 7.7 4.9
4 400 1.8 1.7 1.6
800 2.2 2.0 1.9
1200 2.7 2.3 2.1
1600 3.2 2.7 2.4
2400 4.7 3.8 3.1
3200 6.9 5.3 3.8
4800 12.5 9.0 5.5
6400 22.8 13.8 7.4
5 400 2.0 1.8 1.7
800 2.5 2.2 2.0
1200 3.1 2.7 2.4
1600 4.0 3.3 2.8
2400 6.3 4.9 3.8
3200 10.2 7.5 4.8
4800 22.0 14.6 7.8
6400 55.0 25.0 11.5
6 400 2.1 1.9 1.8
800 2.8 2.4 2.2
1200 3.7 3.1 2.7
1600 4.9 4.0 3.3
2400 8.5 6.4 4.7
3200 15.3 10.7 6.3
4800 38.0 23.9 11.3
6400 90.0 45.0 18.1
7 400 2.2 2.0 1.9
800 3.2 2.7 2.4
1200 4.3 3.6 3.0
1600 6.1 4.8 3.8
2400 11.5 8.4 5.8
3200 22.8 15.4 8.2
4800 66.0 38.5 16.1
6400 A A 28.0
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |4
Note: A- Speed not attainable on grade specified.
Round ‘percent grade’ to next higher integer value.
02.6 Effect of Grade
Effect of grade on two lane roads is more severe than on multilane roads because of the
need to use the opposing traffic lane for passing. When the traffic volume increases
passing will become more difficult and even when there are no heavy vehicles in the
traffic stream, the effect of grade is experienced by passenger cars.
Service flow rates on two lane road segments on specific grades are adjusted for any
given upgrade speed, by applying an adjustment factor fg
Service flow rate for two lane roads on specific grade segments for any upgrade speed is
given by following equations;
V
SFi = 2800 ( )i f d f w f g f HV
C
1
fg =
1 + ( PP I P )
1
f HV =
1 + PHV ( E HV − 1)
I P = 0.02( E − E0 )
E HV = 1 + (0.25 + PT / HV )( E − 1)
Where;
SFi = Total service flow rate in both directions for prevailing roadway and Traffic
conditions, for level of service i, in vph
(v/c)I = Ratio of flow rate to ideal capacity for level of service i, obtained from Table
5.1
fd = Adjustment factor for directional distribution of traffic, obtained from
Table 5.2 In the absence of directional distribution factor, it is better to use 60/40 as the
directional distribution factor
fw = Adjustment factor for narrow lanes and restricted shoulder width, obtained
from Table 5.3
fg = Adjustment factor for the effects of grade on passenger cars
fHV = Adjustment factor for the presence of heavy vehicles in the traffic stream
IP = Impedance factor for passenger cars
PHV = Total proportion of heavy vehicles in the upgrade traffic stream
EHV = Passenger car equivalent for specific mix on heavy vehicles present in the
upgrade traffic stream
E = Base passenger car equivalent for a given percent of grade and a given speed
selected from Table 5.7
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |5
E0 = Base passenger car equivalent for zero percent grade and a given upgrade speed
selected from Table 5.7
PT/HV =Proportion of trucks among heavy vehicles
02.7 Specimen Calculations
Average Daily Traffic = 1399(In 2023)
Present peak Hour Traffic = 10% of ADT
= 140
fd =0.94(From Table 5.2- assuming 60/40 distribution)
fw = 0.77 (from Table 5.3)
(v/c)I =0.8 (from Table 5.1)
PT =17.24% (=5.49%+6.17%+2.49%+3.09% data)
PB =8.58% (=0.69%+7.89% data)
ET =5.0 (Table 5.7)
EB =2.9
1
f HV =
1 + PHV ( E HV − 1)
FHV = 1 /{ 1+[17.24 x (5.0 –1)/100 + 8.58 x (2.9 –1)/100]} = 0.54
V
SFi = 2800 ( ) f d f w f HV
C
SFi = 2800 x 0.8 x 0.94 x 0.77 x 0.54 = 875
Traffic growth rate is 5% and assuming the road will reach to its capacity after n years.
875 = 140 x (1.05)n
n = 37
The road will maintain the LOS D for 37 years from 2024.
Listen to a Lecture!
https://youtu.be/OTQ0uMo9XwY?feature=shared
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |6
CHAPTER 03: DESIGN OF HIGHWAY COMPONENTS
03.01 Road Network Classification
The functional classification of the road network is an essential requirement required for
the determination of the design speeds. Hence the standards of road alignment cross
section dimensions and the minimum requirement of the Right of Way (RoW) of the
roads are connected with the class design speed. At present, the road network in Sri
Lanka is classified into five classes as given in the following table.
Functional Description Relevant road
classification agency
A Class roads These are main arteries or long-distance routes RDA
for moving traffic between different parts of the (Exceptionally
country, normally the major cities and towns CMC)
B Class roads These roads form the next level of the hierarchy RDA
and distribute traffic between residential areas, (Exceptionally
industrial areas, town centres and feed the A CMC)
class roads.
C Class roads These are the main collectors/distributors within Provincial
any zone of area that feed the above A class and Councils
B class roads
D Class roads These are local roads that provide access to Pradeshiya sabhas,
settlements and villages Urban councils
E (Expressways) These are access restricted highways connecting RDA
major cities of the country
Components of the highway may vary depending on the classification it falls.
03.02 Components of a Highway
Following are the major components found in a Highway;
• Carriageway
• Centre Median
• Hard Shoulder
• Soft Shoulder
• Sidewalks
• Pedestrian crossings
• Parking
• Road signs
• Road markings
• Turning bays
• Climbing lanes
• Bicycle lanes
• Passing lanes
• Street lighting
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |7
03.03 Carriageway
A carriageway (also roadway) is that part of a road reserved for motorized traffic. A road
with no physical separation between lines of traffic is called a single carriageway road. A
road with a median between traffic going in opposite directions is known as dual
carriageway road. Each carriageway may have multiple lanes. In addition to one or more
carriageways a road may have one or mode sidewalks
Some roads have four or more separate carriageways, for example, a divided highway
with high occupancy vehicle lanes that are physically separated from the main line, or
freeways with collector-express systems.
Figure 3.1: A Typical Illustration of a carriageway
03.03.1 Width of Carriageway
Following cross sections should be selected as per the traffic volume.
Traffic volume PCU/Day Type of cross section Carriageway width
72,000-108,000 R0 10.5 x 2
40,000-72,000 R1 7.4 x 2
25,000-40,000 R2 7.4 x 2 (7.0 min)
18,000-25,000 R3 3.7 x 2
300-18,000 R4 3.1 x 2
<300 R5 3.5
03.04 Centre Median
Centre medians physically separate the opposing traffic streams and help stop vehicles
dragging into opposing traffic lanes. They are usually built on the centre of urban multi
lane and high speed roads. A centre median can be used to limit turning options for
vehicles and shift these movements to safer locations, create space for protected turn
lanes at intersections and provide a refuge for pedestrians and bicyclists. Medians can
also be accompanied by pedestrian fencing or safety barriers.
Median safety barriers can be made of a range of materials including concrete, steel, and
wire rope. Decisions about what type of median barrier should be used should be based
on several factors including traffic volume, traffic speed, vehicle mix, median width, the
number of lanes, road alignment, crash history, and installation and maintenance costs.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |8
The standard width of the Centre Median in the Sri Lanka is 1.2m.
Figure 3.2: A Picture of a Centre Median
03.05 Hard Shoulder
A hard shoulder is a strip of road that runs along the edge of the motorway to the left of
the left-hand lane. It’s indicated by a solid white line. To stop you from veering too far
left and ending up on the hard shoulder, the white line contains ridges which rumble your
car’s steering and wheels to warn you that you’ve crossed over into the hard shoulder
lane. The standard width of the hard shoulder in the Sri Lanka is 1.5m.
Figure 3.2: A Picture of a Hard Shoulder
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k Page |9
03.06 Soft Shoulder
A soft shoulder is a section of a road or highway that is designed to provide a safe area
for vehicles to pull over in case of an emergency or breakdown. This area is typically
graveled and is located on the side of the road, usually next to a hard shoulder or median.
The surface of a soft shoulder is usually less stable than the main roadway and may be
more prone to erosion and rutting.
The main purpose of a soft shoulder is to provide a safe place for vehicles to pull over and
stop, reducing the risk of collisions and accidents. This is especially important on busy
roads or highways where there is a lot of traffic. A soft shoulder can also be used as a
temporary detour or escape route in case of an emergency or accident.
Figure 3.3: A Picture of a Soft Shoulder
03.07 Sidewalks
A sidewalk (also pavement, footpath, footway, and sometimes platform) is a path along
the side of a road. A sidewalk may accommodate moderate changes in grade (height) and
is normally separated from the vehicular section by a kerb. There may also be a strip of
vegetation, grass or bushes or trees or a combination of these between the pedestrian
section and the vehicular section. In some places, the same term may also be used for a
paved path, trail or footpath that is not next to a road, for example, a path through a park.
Stone slabs called flagstones or flags are sometimes used where an attractive appearance
is required, as in historic town centres. In other places, pre-cast concrete slabs (called
paving slabs or, less correctly, paving stones) are used. These may be coloured or
textured to resemble stone.
Figure 3.4: A Picture of a Sidewalk
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 10
03.08 Pedestrian Crossings
A pedestrian crossing or crosswalk is a designated point on a road at which some means
are employed to assist pedestrians wishing to cross. They are designed to keep
pedestrians together where they can be seen by motorists, and where they can cross most
safely across the flow of vehicular traffic. Pedestrian crossings are often found at
intersections, but may also be at other points on busy roads that would otherwise be too
unsafe to cross without assistance due to vehicle numbers, speed or road widths. They are
generally also installed common where large numbers of pedestrians are attempting to
cross (such as in shopping areas) or where vulnerable road users (such as school children)
regularly cross.
The term pedestrian crossing includes a wide range of crossing provisions, both those that
give priority to pedestrians, and those that assist pedestrians, but legally still prioritize
road vehicles. Signalized pedestrian crossings meanwhile clearly separate when each type
of traffic (pedestrians or road vehicles) can use the crossing. Pedestrian crossings,
especially when combined with other features like pedestrian priority or raised surfaces,
can be used as a traffic calming technique.
The simplest crossings may just consist of some markings on the road surface. These are
often called Zebra crossings, referring to the alternate yellow and black stripes painted on
the road surface. Depending on local laws, pedestrians crossing the road may or may not
have priority over road traffic when using the crossing. If the pedestrian has priority, then
they have an incentive to use the crossing instead of crossing the road at other places. In
some countries, pedestrians may not have priority, but may be committing an offence if
they cross the road elsewhere.
Figure 4.5: A Picture of a Pedestrian Crossing
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 11
03.09 Parking
Parking is the act of stopping a vehicle and leaving it unoccupied for more than a brief
time. Parking on one or both sides of a road is commonly permitted, though often with
restrictions. Parking facilities are constructed in combination with most buildings, to
facilitate the coming and going of the buildings' users.
Parking facilities include indoor and outdoor private property belonging to a house, the
side of the road where metered or laid-out for such use, a parking lot (American English)
or car park (British English), indoor and outdoor multi-level structures, shared
underground parking facilities, and facilities for particular modes of vehicle such as
dedicated structures for cycle parking.
03.09.1 Parallel Parking
With parallel parking of cars, these are arranged in a line, with the front bumper of one
car facing the back bumper of an adjacent one. This is done parallel to a kerb, when one
is provided. Parallel parking is the most common mode of street side parking for cars. It
may also be used in parking lots and parking structures, but usually only to supplement
parking spaces that use the other modes.
Figure 4.6: A Picture of a Parallel Parking
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 12
03.09.2 Perpendicular Parking
With perpendicular parking of cars, these are parked side to side, perpendicular to an
aisle, curb, or wall. This type of car parking is more scalable than parallel parking and is
therefore commonly used in car parking lots and car parking structures.
Often, in car parking lots using perpendicular parking, two rows of parking spaces may be
arranged front to front, with aisles in between.
Sometimes, a single row of perpendicular car parking spaces is marked in the center of a
street. This arrangement eliminates reversing from the maneuver; cars are required to
drive in forwards and drive out forwards.
Figure 3.6: A Picture of a Perpendicular Parking
03.09.3 Angle Parking/Echelon Parking
Angle parking of cars is similar to perpendicular parking for these vehicles, except that
cars are arranged at an angle to the aisle (an acute angle with the direction of approach).
The gentler turn allows easier and quicker parking, narrower aisles, and thus higher
density than perpendicular parking. While in theory the aisles are one way, in practice
they are typically wide enough to allow two cars to pass slowly when drivers go down the
aisles the wrong way.
Angle parking is very common in car parking lots. It may also be used in street side car
parking. when there is more width available for car parking than would be needed for
parallel parking of cars, as it creates a larger number of parking spaces. Some cities have
utilized angled parking on-street (as compared to off-street parking facilities). This has
been done mostly in residential, retail and mixed use areas where additional parking
compared to parallel parking is desired and traffic volumes are lower.
Figure 3.7: A Picture of an Echelon Parking
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 13
03.10 Road Signs
Traffic signs or road signs are signs erected at the side of roads to provide information to
road users. With traffic volumes increasing over the last eight decades, many countries
have adopted pictorial signs or otherwise simplified and standardized their signs to
facilitate international travel where language differences would create barriers, and in
general to help enhance traffic safety. Such pictorial signs use symbols (often silhouettes)
in place of words and are usually based on international protocols. Such signs were first
developed in Europe, and have been adopted by most countries to varying degrees.
Traffic signs can be grouped into several types. For example, Annex 1 of the Vienna
Convention on Road Signs and Signals (1968), which at 30 June 2004 had 52 signatory
countries, defines eight categories of signs:
• Danger warning signs
• Priority signs
• Prohibitory or restrictive signs
• Mandatory signs
• Special regulation signs
• Information, facilities, or service signs
• Direction, position, or indication signs
• Additional panels
Figure 3.7: A Set of Road Signs
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 14
03.11 Road Markings
Road surface marking is any kind of device or material that is used on a road surface in
order to convey official information. They can also be applied in other facilities used by
vehicles to mark parking spaces or designate areas for other uses.
Road surface markings are used on paved roadways to provide guidance and information
to drivers and pedestrians. Uniformity of the markings is an important factor in
minimizing confusion and uncertainty about their meaning, and efforts exist to
standardize such markings across borders. However, countries and areas categorize and
specify road surface markings in different ways.
Road surface markings are mechanical, non-mechanical, or temporary. They can be used
to delineate traffic lanes, inform motorists and pedestrians or serve as noise generators
when run across a road, or attempt to wake a sleeping driver when installed in the
shoulders of a road. Road surface marking can also indicate regulation for parking and
stopping.
There is continuous effort to improve the road marking system, and technological
breakthroughs include adding reflectivity, increasing longevity, and lowering installation
cost.
Figure 3.8: A Picture of Road Markings
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 15
03.11.1 Cat’s Eyes
Cat's eye (road) was invented by Percy Shaw in the 1930s; Cat's eyes equip most major
routes in the British Isles. They consist of four reflect lenses mounted in a durable white
rubber housing, two facing fore and two facing aft. The housing is mounted within a cast
iron shoe, which the rubber housing sinks in to when driven over. This provides
protection from snow ploughing and allows the lenses to be self-cleaning—they pass a
rubber blade when depressed. The lenses are available in a variety of different colours,
mainly white, yellow/orange, green, red, and blue.
Figure 4.9: A Picture of a Cat’s Eye
03.12 Turning Bays
Turning bays provide room for left turning or right turning vehicles to decelerate their
turns and/or to queue while waiting to turn. Right turn bays are particularly effective at
reducing delay and collisions by getting those vehicle out of the way of through vehicles.
At busy signalized intersections, dual and triple left turn lanes are used effectively to
reduce the time that those vehicle need the right of the way. Dual right turn lanes are also
used at some intersections. The drawbacks to using turn bays include higher right of way
costs and longer crossing distances for pedestrians.
Through the years, many criteria have been published for left turn and right turn bays.
The criteria are typically different for unsignalized and signalized signalized
intersections.
One well known set of turn bay criteria is as follows:
• A single right turn bay for peak hour right turn volumes of 100 veh/hr or more.
• A dual right turn bay for peak hour right turn volumes of 300 veh/hr or more.
• A single left turn bay for peak hour right turn volumes of 300 veh/hr or more.
Once a designer has decided to provide turn bays, he or she must decide on bay length.
AASHTO (2001) recommends that overall length should be the sum of the taper length,
deceleration length and storage length. Taper rates into a turn bay are typically between
8:1 and 15:1, with lower rates for bays on urban roads with lower speeds. Taper rates into
dual right turn bays are sometimes even lower than 8:1 to maximize storage area. It is
desirable to allow vehicles to decelerate fully after having departed a through lane,
although this is sometimes impracticable in urban areas. AASHTO (2001) states that
typically length needed to decelerate from 45, 50 and 55mph speeds to full stop are 430,
550, and 680 feet respectively on grades of less than 3%.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 16
Figure 4.10: A Picture of a Turning Bay
03.13 Climbing Lanes
Climbing lanes are a roadway lane design typically used on national highways. They
allow slower travel for large vehicles, such as large trucks or Semi-trailer trucks, up a
steep grade. Since heading uphill is difficult for these types of vehicles, they can travel in
the climbing lane without slowing traffic behind them.
On major routes, such as motorways in the UK, the climbing lane is also referred to as a
crawler lane. Due to high construction costs required, the provision of a climbing lane
may be justified only for high volume roads. So that the improvement in the operational
efficiency of road will balance the construction cost incurred.
Figure 4.9: A Picture of a Climbing Lane
03.14 Bicycle Lanes
A bicycle lane is a portion of the roadway that has been designated by striping, signing,
and pavement markings for the preferential and exclusive use of bicyclists.
03.14.1 When to consider this Type of Facility
Bicycle lanes may be considered when it is desirable to delineate road space for
preferential use by cyclists. Streets striped with bicycle lanes should be part of a
connected bikeway system rather than being an isolated feature. Bicycle lanes function
most effectively in mid-block situations by separating bicyclists from overtaking motor
vehicles. Integrating bicyclists into complicated intersection traffic patterns can
sometimes be problematic. Strip development areas, or roadways with a high number of
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 17
commercial driveways, tend to be less suitable for bicycle lanes due to frequent and
unpredictable motorist turning movements across the path of straight-through cyclists.
Striped bike lanes can be effective as a safety treatment, especially for less-experienced
bicyclists, under the following conditions:
• Two-lane residential/collector streets with lower traffic volume, low- osted speed
limit, adequate roadway width for both bike lanes and motor vehicle travel lanes,
and an absence of complicated intersections.
• A median-divided multi-lane roadway with lower traffic volumes and a low
volume of right and left turning traffic would be a more appropriate location for
bicycle lanes than a high traffic volume undivided multi-lane roadway with a
continuous center turn lane.
• Most bicyclists will choose a route that combines direct access with lower traffic
volumes. An origin and destination of less than 4 miles is desirable to generate
usage on a facility.
03.14.2 Principal Planning Concerns with Bicycle Lanes
• High traffic volume, strip-developed areas that generate a high number of motor
vehicle turning conflicts with straight-through cyclists riding in bicycle lanes are
to be avoided.
• Most bicycle/motor vehicle crashes occur at intersections and driveways.
Roadways with numerous complicated intersections and interchanges increase the
potential for crashes.
• Inadequate lane width or use of the concrete gutter pan as the bike lane area is not
desirable.
• Abrupt termination of bike lanes at hazard or constraint locations creates a
situation that may force bicyclists to make awkward movements in traffic.
• Bike lanes striped on roadways with numerous complicated intersections,
including freeway interchanges, may give some less-experienced bicyclists a false
sense of security.
Figure 4.10: A Picture of a Bicycle Lane
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 18
03.15 Passing Lanes
A passing lane or overtaking lane is the lane on a multi-lane highway or motorway closest
to the center of the road (the central reservation).
In North American terminology, the passing lane is often known as a left lane or leftmost
lane, due to left hand drive (driving on the right). In British/Irish terminology, the passing
lane is termed an outer lane or outside lane, while a normal lane nearer the hard shoulder
is termed an inner lane (or inside lane).
In modern traffic planning, passing lanes on freeways are usually designed for
through/express traffic, while the inner lanes have entry/exit ramps. However, many
freeways often have ramps on the passing lane, these are known as "left exits" in North
America.
A passing lane is often colloquially referred to as a fast lane because it is often used for
extended periods of time for through traffic or fast traffic. In theory, a passing lane should
be used only for passing, thus allowing, even on a road with only two lanes in each
direction, motorists to travel at their own pace.
Figure 4.10: An Illustration of a Passing lane
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 19
03.16 Street Lighting
A Street light, lamppost, street lamp, light standard, or lamp standard is a raised source of
light on the edge of a road, which is turned on or lit at a certain time every night. Modern
lamps may also have light-sensitive photocells to turn them on at dusk, off at dawn, or
activate automatically in dark weather. In older lighting this function would have been
performed with the aid of a solar dial. It is not uncommon for street lights to be on posts
which have wires strung between them, such as on telephone poles or utility poles.
Figure 4.10: A Picture of Street Lights
03.16.1 Advantages
Major advantages of street lighting includes: prevention of accidents and increase in
safety. Studies have shown that darkness results in a large number of crashes and
fatalities, especially those involving pedestrians; pedestrian fatalities are 3 to 6.75 times
more vulnerable in the dark than in daylight. Street lighting has been found to reduce
pedestrian crashes by approximately 50%.
Furthermore, lighted intersections and highway interchanges tend to have fewer crashes
than unlighted intersections and interchanges.
03.16.2 Disadvantages
The major criticisms of street lighting are that it can actually cause accidents if misused,
and cause light pollution.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 20
CHAPTER 04: SURVEYING ALONG THE ROAD CORRIDOR
04.1 Introduction
Detailed topographic survey needs to be executed along the proposed or existing road
corridor in order to develop detailed engineering designs. Such topographic survey should
be adequate to depict the precise topography of the area and to generate the terrain model
of the area concerned.
04.2 Surveying Corridor
Generally, the surveying corridor is specified by the Road Development Authority or the
relevant road agency. Surveying corridor can be 15m each side from the Centre Line for
an existing road and as wide as 50m each side from the proposed centre line for a new
highway. Even if the corridor widths are specified to be such, still the important
geographical features like streams, drains, rivers, lakes, embankments etc in the close
vicinity outside the defined corridor should be surveyed in full as far as practicable. In
case such a feature falls partially inside the defined corridor, dimension of the whole
feature needs to be surveyed. In curved sections, an additional width should be surveyed
on inner side of the curve. These additional widths are generally provided by the road
agency.
04.3 Extent to be surveyed
Coordinates of a sufficient number of points on the existing road surface and other cross-
sectional elements such as road shoulders, walkways, drains, embankment tops and
bottoms, etc need to be taken. It is important to note that the centre line and the tar edge
of existing roads should be surveyed and documented in a precise manner for an existing
road as they are of great importance to calculate the recambering requirement in the
vertical design. An approximate level for each point should be noted using the Total
Station (TS). Although the TS levels are not accurate for a precise calculation, they are
widely used for the initial design of the highways to approximate the cutting and filling
quantities.
04.4 Detailed Surveying
Following features need to be included in the detailed surveying
• Position of all control points and traverse stations established in the area under
concern
• Positions of all secondary traverse stations established
• Positions of all Permanent Bench Marks and TBMs established
• Tar Edge of the road and the edge of the road platform
• All buildings, houses, huts and other structures temporary and permanent
• All paved and unpaved roads, foot paths, driveways etc noting the carriageway
width where applicable
• All fences live and permanent, boundary walls, retaining walls, gates etc
• Existing drains, streams, irrigation structures, canals, channels, wells, rivers,
bridges and culverts, KM and mile posts within the corridor
• All electric transmission lines including the position of pylons etc and location of
substation, transformers, electric posts etc
• All telecommunication lined, posts, control boxes etc
• All places of religious, archeological or historical importance
• Any other premises of importance to the community such as graveyards and
playgrounds
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 21
• Existing rocks, boulders etc
• Steep embankments and cuttings
• All systematic and continuous plantations, boundaries of estates and lands, paddy
fields, etc
04.5 Intersection Surveying
An adequate length along the crossing roads should be taken in the topographical survey.
Usually this length is of 100m-150m range. However, if the limit of surveying falls within
a horizontal curve, the details up to the end of the curve should be taken. Any other by
roads connecting the major and minor roads should be taken at least up to 30m. The width
of the corridor at an intersection can be larger and the design engineer has to specify the
extent of surveying depending on his educated guess.
04.6 Bridges, Rivers, Causeways Surveying
A sufficient length at the range of 50m-10m depending on the site condition has to be
surveyed along the river or the stream.
04.7 Drafting and Presentation of Point Data
Drafting has to be carried out as per an agreed standard, specifying the building types,
number of floors, roof type, permanent or temporary etc. A distinct line type has to be
used for the Centre Line and Tar Edges each for convenient identification. Embankments
should be shown with the direction of slope. Usually the drafting is done in AutoCAD
software. Different layers should be used to present different items in the drawing. Letter
size is usually 1.5mm.
Figure 7.1: A Snapshot of the Topographic Surveying Drawing
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 22
Point file is usually presented in a spreadsheet like MS Excel. They are generally in
E,N,Z format or N,E,Z format.
Figure 4.2: A Snapshot of a Point File
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 23
CHAPTER 05: TERRAIN MODELING USING CIVIL 3D
05.1 Introduction
A Surface in Civil 3D is a 3D model of the existing road and topography, created using
TS or other available data. There are few methods available to create the surface
depending on the data available
• Using a Point File (.txt or .csv)
• Using Contour Lines
• Using Embedded data
05.2 Surface Creation using a Point File (.csv)
In this instance, the Designer is given the Topographic Survey File and a Point File (.csv)
format
A Snapshot of the Topographic Survey Drawing
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 24
A Snapshot of the Excel File submitted by the Surveyor
• Open the Civil 3D program usually as any other Windows based program.
• Open Civil 3D Worksheet
• File → New
• You will get the ‘Select Template’ dialog box.
• Select HighwayHO1.dwt (Template can be changed according to how you name your customized
template)
• Press Open.
• Save the Drawing as per the file hierarchy given, naming it Surface.dwg.
• Open the Topographic Survey File→Select the drawing→Edit→Copy
• Switch to the Surface.dwg file→Edit→Paste to original coordinates.
• Save the drawing
Now it is necessary to prepare your Excel file in order to import the data to the
Surface.dwg File. Owing to the obvious reasons of copyright infringement, an Excel file
cannot be imported to Civil 3D file as it is. So it is necessary to make a .csv file from the
Excel file.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 25
It is important to check the coordinate system before importing the data. Usually Civil 3D
uses N,E,Z or E,N,Z formats. It will be a good idea to check a point in the drawing to see
what will be X (N or E?) and what will be Y (N or E?)
• Delete the first row of the Excel file if it has any texts (like Point Number, Position X, Position Y
etc)
• File→Save As (Browse to the relevant Folder)
• Save As Type = CSV Comma Delimited
• Save
Now the data set is stored as a .csv file.
• In the Civil 3D File, Toolspace→[Drawing Name]→Points→Create
• Create Points dialog box will appear.
• Press Import Points tool bit.
• ‘Import Points’ dialog box will appear.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 26
• Here you have to set the format according to your data file (In this case, PENZ Comma delimited)
• Press the ‘+’ mark.
• Browse to the Folder in which your .csv file is saved
• Select and Open (Make sure the Files of Type = .csv)
• Check ‘Add Points to Point Group’
• Press the tool bit right to the empty combo box, ‘Add Points to the Point Group’.
• Give a suitable name (eg. TOPO)→Press OK
• Press OK
• Then the points will be imported to the File.
When you try to import the .csv file to the Civil 3D, make sure the .csv file is not used by
any other programme (i.e. it is not open in MS Excel). Otherwise a sharing violation will
occur and data will not be imported.
A Snapshot of the Topographic Survey Drawing with Points
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 27
Now you have a Flat Plan of the road with all the 3D points imported it. Next step will be
to create the Surface
• Toolspace→Prospector→Surface→[RC]→Create Surface
• ‘Create Surface’ dialog box will appear.
• Press Name under Information.
• Change the Name to EG.
• Toolspace→Prospector→Surfaces→EG→Definition→ Point group [RC]→Add
• Select Topo which we created earlier.
• Press OK.
• Now the surface will be drawn.
Sometimes it is necessary to Regen the drawing to visualize the created surface.
A Snapshot of the Topographic Survey Drawing with the Created Surface
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 28
05.2.1 Break Lines
The basic modelling concept of Civil 3D is to draw lines joining the available points and
to interpolate the levels in between. This could result in a wrong interpretation if such a
line crosses the existing centre line or the tar edges of the road etc. Break Lines are
introduced to avoid this.
Following are the main candidates for the Break Lines in Civil 3D
• Existing Centre Line
• Tar Edges
• Retaining walls
• Dam tops etc
Any candidate selected to be a Break Line should be a continuous polyline.
• Toolspace→Prospector→Surface→EG→Definition→ Break lines→[RC]→Add
• ‘Add Breaklines’ dialog box will appear.
• Give the description as CL, TarEdge, etc according to the line you select.
• Give the Type = Proximity
• Press OK.
• ‘Select objects’ will appear in the command line.
• Select the appropriate line.
• Press Enter.
• Then that line will be added as a breakline.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 29
05.2.2 Boundary
The boundary is drawn in order to restrict the surface to an area in which the survey
points are available. As obvious, it makes no sense to have the surface beyond the area
where survey points are not taken.
• Draw a closed boundary in RDA-TOPO-SUR_NEG layer in 2D poly. (If this layer is not available,
create it in the layer manager).
• The closed boundary should be drawn in polylines.
• Toolspace→Surfaces→Definition→Boundaries→Add.
• ‘Add Boundaries’ dialog box will appear.
• Change the parameters appropriately.
• Press OK.
Now the surface will be restricted only to the relevant area.
This ends the surface creation using .csv File
Listen to a Lecture!
https://youtu.be/tFxS4FIfS5g?feature=shared
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 30
05.3 Surface Creation using a Point File (.txt)
Some Surveyors submit the Point details in a Notepad file as follows;
Point Details in a Notepad File
These points can be directly imported to the Civil 3D file as in 2.2.
Listen to a Lecture!
https://youtu.be/Mxnc4KSre-c?feature=shared
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 31
05.4 Surface Creation using Contours
Sometimes the Contour Lines are available in the Topographic Survey File. There is a
different method to derive the Surface using them.
• Select a Contour Line
• [RC]→Select Similar
• [RC]→Isolate Objects→Isolate Selected Objects
• Toolspace→Prospector→Surface→[RC]→Create Surface
• ‘Create Surface’ dialog box will appear.
• Press Name under Information.
• Change the Name to EG.
• Toolspace→Prospector→Surfaces→EG→Definition→ Contours [RC]→Add
• ‘Add Contour Data’ dialog box will appear.
• Change the Parameters as shown and Press OK
• ‘Select Contours’ will prompt in the command line
• Select the Contours and Press Enter
• The Surface will be drawn
It should be noted however, that contour drawings are usually used to do the Preliminary
Road Designs. Therefore, corrections like Break lines cannot be applied to this Surface. A
Boundary may be added depending on the requirement.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 32
A Snapshot of the Surface created using Contours
Listen to a Lecture!
https://youtu.be/d3eo73iFf-g
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 33
05.5 Surface Creation using Embedded Data
Some Surveying Software produce the topographic surveying files with the levels
embedded in the file itself. This may be through the means of a piece of text which is
referenced exactly to the relevant point or a point itself which is located at the actual
coordinates and the elevation. In the case of the piece of text, this method will not be
accurate if the text is not referenced to the point with correct coordinates.
A topographic survey drawing with embedded data is shown in the following figure.
A Snapshot of a topographic survey drawing with embedded data
“EATTEXT” Method is usually used to extract data from such a file and to create the
surface.
• Select the piece of text depicting the level (or the point itself) as the case would be, in the
drawing.
• [RC] Select Similar
• [RC] Isolate Objects→Isolate Selected Objects
• Type “EATTEXT” in the command line and Enter
• ‘Data Extraction Begin (Page 1 of 8)’ dialog box will prompt.
• Select ‘Create a New Data Extraction’ and Press Next.
• ‘Save Data Extraction As’ dialog box will prompt. Browse to the relevant Folder, Give a File Name
(eg. Data) and Save
• ‘Data Extraction Define Data Source (Page 2 of 8)’ dialog box will prompt. Press Next
• ‘Data Extraction Select Objects (Page 3 of 8)’ dialog box will prompt. Here it is necessary to
select the item(s) your data are stored. It could be one or any of text, point, etc. Press Next.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 34
• ‘Data Extraction Select Properties (Page 4 of 8)’ dialog box will prompt. You have to select
properties so as to get x,y,z coordinates. Press Next
• ‘Data Extraction Refine Data (Page 5 of 8)’ dialog box will prompt. Press Next.
• ‘Data Extraction Choose Output (Page 6 of 8)’ dialog box will prompt.
• Tick ‘Output Data to External File’
• Browse to your Data Folder, give a name (eg. Extracted Levels) and Save the File. It will be saved
as an MS Excel File.
• Press Next and the Wizard will reach the Final Step,
• ‘Data Extraction Finish (Page 8 of 8)’ dialog box will prompt.
• Press ‘Finish’
• Now in your Data Folder, an MS Excel File has been created.
• Open it, remove unnecessary rows/columns and save as a .csv file.
• Create the Surface as described in 2.2
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 35
A Snapshot of the Created MS Excel File
Listen to a Lecture!
https://youtu.be/-VHFrVacHCU
05.6 Exporting the Surface to LandXML Format
XML is an intermediate data format which is usually used in transferring data from one
data base to another data base etc. The importance is to diminish the points which are
there in the Surface.dwg file and to increase the speed.
• Toolspace→Surfaces→EG→[RC]→Export Land XML
• ‘Export to LandXML’ dialog box will appear.
• Check Surfaces and EG
• Press OK.
• ‘Export LandXML’ dialog box will appear.
• Browse to the required location.
• Press Save.
• Save the Surface.dwg File as well and close it.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 36
CHAPTER 06: SIGHT DISTANCE
06.1 Introduction
Sight distance is unobstructed distance of roadway ahead visible to the driver. There are
multiple types of sight distances that include stopping sight distance, passing sight
distance, decision sight distance, overtaking sight distance, intersection sight distance etc.
It is critical that sight distance issues be properly developed and applied to projects. In
this design, following sight distances was considered in detail;
• Stopping Sight Distance
• Overtaking Sight Distance
• Continuation Sight Distance
Horizontal sight distance shall be checked when designing slopes and retaining walls or
where median barriers, center piers, structure screening or screen plantings are used.
Combinations of slight horizontal curvature with crest vertical curves may seriously
diminish sight distance where high kerb or planting is used. Slopes, walls and other side
obstructions shall be set back from the pavement edge to provide at least minimum
stopping sight distance for a driver in the traffic lane nearest the obstruction. The
possibility of future conversion of shoulders or parking areas to driving lanes should be
considered.
Sight distances are provided for the vehicles to cater for following situations;
• To stop when approaching an obstacle.
• When it requires to take a decision regarding overtaking.
• When it requires making an assessment of the course of action to be taken at an
intersection.
06.2 Constants used for Sight Distance
In designing the Sight Distances, following values are used as standard RDA values;
• PIEV Value or the Total Reaction time (tR) which is defined as the time between
the instant the hazard comes into view and the instant the vehicle begins to slow
down after the brakes have been applied is taken as 2.5 Seconds.
• Driver eye height is considered as follows;
o Passenger Car -1.05m
o Commercial Vehicle - 1.8m
• Object cut off height above road surface is taken as follows;
o Approaching vehicle -1.15m
o Stationary object - 0.2m
o Vehicle tail height/Stop light - 0.6m
o Height of Head Light - 0.75m
o Upward Divergence Angle - 1.00 deg
o Vertical Clearance - 5.2m
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 37
06.3 Stopping Sight Distance
Stopping sight distance is the minimum distance required for a vehicle traveling at a
particular design speed to come to a complete stop after an obstacle on the road becomes
visible. Stopping sight distance is normally sufficient to allow an alert and prudent driver
to come to a hurried stop under normal circumstances. Stopping sight distance is the
summation of two distances;
• The distance travelled during the total reaction time.
• The distance travelled during braking time.
Figure 6.1: A Graphical Illustration of the Stopping Sight Distance
Stopping sight distance must, at a minimum be obtained on all vertical and horizontal
alignments.
The Stopping Sight Distance (SSD) can be calculated from following equation
Where:
SSD - Stopping Sight Distance (m)
V - Design Speed of the Vehicle (kmph)
tR - Total reaction Time (sec.)
μ - Coefficient of Longitudinal Friction
Design values for Stopping Sight Distances for various Design Speeds are shown in table
6.1
Table 6.1: Design Values for Stopping Sight Distance
Design Speed Stopping Sight
(kmph) Distance-SSD
(m)
30 30.0
40 45.00
50 65.00
60 85.00
70 115.00
80 140.00
100 205.00
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 38
Height of eye (m) 1.05
Height of object (m) 0.200
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
06.3.1 Effect of Grade in Breaking
The above Stopping Sight Distance is subject to change with the effect of grade on
braking distance. Its influence can be shown in the following equation.
Where:
SSD - Stopping Sight Distance (m)
V - Design Speed of the Vehicle (kmph)
tR - Total reaction Time (sec.)
μ - Coefficient of Longitudinal Friction
06.4 Overtaking Sight Distance
The necessity of the overtaking emerges owing to the fact that all the vehicles do not
travel in uniform speed. Attention should be focused to design the road such that the
vehicles traveling at the design speed has the chance to overtake slower moving vehicles.
To accomplish the overtaking manoeuvre successfully sans danger, a driver should be
provided with the adequate and sufficient sight distance. On undivided roads, overtaking
involves the occupation of the road space normally used by opposing traffic. The
overtaking sight distance is defined as the distance which should be available to enable
the driver to overtake another vehicle safely and comfortably without interfering with the
speed of an oncoming vehicle traveling at the design speed should it come into the view
after the overtaking manoeuvre is started.
Despite the fact that the actual safe sight distance depends on many variables, the
following simplifying assumptions are made.
• The overtaken vehicle travels uniformly at one step lower than the design speed.
• The overtaking vehicle trails the overtaken vehicle as it enters the overtaking
section.
• Overtaking manoeuvre is accomplished by accelerating in the early part of the
manoeuvre up to reaching design speed and completing the manoeuvre at the
same speed.
Figure 6.2: A Graphical Illustration of the Overtaking Sight Distance
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 39
Design values for Overtaking Sight Distances for various Design Speeds are shown in
table 6.2
Table 6.2: Design Values for Overtaking Sight Distance
Design Speed Stopping Sight
(kmph) Distance-SSD
(m)
30 160.00
40 220.00
50 280.00
60 350.00
70 430.00
80 520.00
100 690.00
Height of eye (m) 1.05
Height of object (m) 0.200
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
06.5 Continuation Sight Distance
The difference between the Continuation Sight Distance (CSD) and the Overtaking Sight
Distance (OSD) is the fact that Continuation Sight Distance assumes that the overtaking
vehicle is already on the other lane when the decision is to be made whether to complete
or abort the overtaking action. The Continuation Sight Distance is generally shorter than
the Overtaking Sight Distance.
It is the standard RDA practice to calculate the Continuation Sight Distance to be twice as
large as the Stopping Sight Distance. If the Continuation Sight Distance can be provided,
it would automatically fulfil the Stopping Sight Distance requirement for speeds greater
than the specified design speed.
As far as the budget allows, the designer should always explore for means to
accommodate at least the Continuation Sight Distance throughout the road stretch.
Figure 6.3: A Graphical Illustration of the Continuation Sight Distance
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 40
Design values for Continuation Sight Distances for various Design Speeds are shown in
table 6.3
Table 6.3: Design Values for Continuation Sight Distance
Design Speed Continuation Sight
(kmph) Distance-SSD
(m)
30 60.00
40 90.00
50 130.00
60 170.00
70 230.00
80 280.00
100 410.00
Height of eye (m) 1.05
Height of object (m) 0.200
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
Listen to a Lecture!
https://youtu.be/REGG4xy2Vh0?feature=shared
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 41
CHAPTER 07: THEORY OF HORIZONTAL ALIGNMENT
07.01 Introduction
A Horizontal Alignment of a road is defined as a series of straights and circular curves
connected by transition curves indicating the path of the road in plan. Further, the
tangents may directly be connected where a transition curve could be omitted.
Horizontal alignment should provide for safe and continuous operation at a uniform
design speed for substantial lengths of highway. The major considerations in horizontal
alignment design are as follows;
• Safety
• Profile
• Type of facility
• Design speed
• Geotechnical features
• Topography
• Right of way cost
• Construction cost.
In design, safety is always considered, either directly or indirectly. On expressways or in
metropolitan areas, alternative studies often indicate that right of way considerations
influence alignment more than any other single factor. Topography controls both curve
radius and design speed to a large extent. The design speed, in turn, controls sight
distance, but sight distance must be considered concurrently with topography because it
often demands a larger radius than the design speed. All these factors must be balanced to
produce an alignment which optimizes the achievement of various objectives such as
safety, cost, harmony with the natural contour of the land, and at the same time adequate
for the design classification of the highway. Horizontal alignment shall provide at least
the minimum stopping sight distance the chosen design speed at all points on the highway
07.02 Circular Horizontal Curve Parameters
When a vehicle is moving on a curved path, it is subjected to an outward force,
commonly known as the centrifugal force. In order to resist this force, it is the usual
practice to superelevate the roadway cross section. So, for a given radius and a speed a set
force is required to maintain the vehicle in the circular path. Following factors are
assumed to contribute to this phenomenon;
• Side friction developed between tyre and pavement.
• Superelevation
Fig 7.1 shows the parameters of a circular horizontal curve.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 42
Figure 7.1: Parameters of a circular horizontal curve
Where;
PC - Point of curvature/commencement
PT - Point of tangency
PI - Point of intersection (vertex)
T - PC to PI or PI to PC (subtangent)
R - Radius of the simple curve
L - Length of chord from PC to PT
Lc - Length of curve from PC to PT
E - External distance
m - Middle ordinate or mid-ordinate
I - Deflection angle (Angle of intersection and central angle)
x - Offset distance from tangent to the curve, perpendicular to T
Q - Offset angle subtended at PC between PI and any point in the curve
D - Degree of curve is the central angle subtended by an arc or length of curve
(arc basis) or chord (chord basis) equal to one station
Sub - Chord distance between two adjacent full stations
Chord
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 43
07.03 Minimum Radius of the Horizontal Curve
For a given speed and a superelevation the minimum curve radius necessary can be
derived using the fundamentals of physics. Fig 9.2 shows the schematic diagram of forces
acting on a vehicle in a superelevated roadway.
Figure 7.2: Forces acting on a vehicle in a superelevated roadway
In this diagram, the forces are as follows.
F1 - Centrifugal force - mV 2
r
F2 - Weight of the vehicle - mg
nf1 - Reactions of tyres (n) perpendicular to the plane - R
f2 - Resolved component of weight and centrifugal - V2
force perpendicular to the plane mgCos + m Sin
r
f3 - Resolved component of weight along the plane - mgSin
(Supporting force)
f4 - Resolved component of centrifugal force along V2
the plane (Disturbing Force) - m Cos
r
nf5 - Friction force of tyres (n) along the plane - F
(Supporting force)
Where;
m -Mass of the vehicle
V -Design speed of the road (kmph)
g -Gravitational acceleration (ms-2)
r -Radius of the curve (m)
n -Number of tyres
α -Superelevation angle (rad)
F -Friction force (N)
R - Reaction perpendicular to the plane (N)
Considering the dynamic equilibrium;
F = R
V2
R = mgCos + m Sin
r
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 44
Therefore;
V2
F = .(mgCos + m Sin )
r
Considering the equilibrium along the road plane;
Resisting Force >= Supporting Force
V2
mgSin + F m Cos
r
V2 V2
mgSin + (mgCos + m Sin ) m Cos
r r
V2
g (tan + ) (1 − tan )
r
V 2 (1 − tan )
r
g (tan + )
μtanα is very small compared to 1. Tanα = e. Substituting and modifying the equation to
substitute V in kmph;
This is the standard equation used by RDA to calculate the minimum curve radii against
each of the superelevations
07.04 Side Friction Factor
The Side Friction or the value of the coefficient of lateral friction depends upon a number
of factors among which the following are dominant.
• Vehicle Speed
• Type and condition of roadway surface
• Type and condition of the tyres.
Table 7.1 tabulates the maximum values of Coefficient of Side Friction.
Table 7.1: Maximum Values of Coefficient of Side Friction
Design Speed Maximum Design Values of Coefficient of Side Friction
(kmph) Bituminous Roads Gravel Roads
30 0.210 0.140
40 0.190 0.130
50 0.170 0.120
60 0.160 0.110
70 0.150 0.100
80 0.140 0.090
90 0.130 __
100 0.128 __
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 45
07.05 Design of Horizontal Alignment – General Considerations
For a sound design, following general controls are very important as far as the horizontal
alignment is concerned.
• Alignment should be maintained as directional as feasible.
• The topography of the region should be considered when designing the alignment.
The alignment should generally conform to the natural contours of the area.
• It is generally the accepted practice to keep the number of curves to a minimum.
• Sudden turns should be avoided as much as possible.
• A curve at the end of a long tangent should be large enough to ensure safe driving.
Else a sharp curve could lead to hazardous situations.
• A radius as large as possible with respect to a particular design speed should be
adopted. Minimum radii should be restricted only for the critical locations.
• In the places where the use of reverse curves become unavoidable in hilly terrain,
adequate long transitional curves should be provided for super elevation run off.
07.06 Horizontal Curvature
Horizontal curvature is applied to the places where change in direction applies to the
design centre line. Curve calculations shall be based on the arc definition for a circular
curve. The project location should be assessed to determine the appropriate degree of
curvature. Sufficient curve length must be used in open country to prevent hazardous
situations.
The use of compound curves is advisable only where they are extremely necessary.
Compound curves are adjoining curves with differing degrees of curvature but have no
transition.
Broken back curves are hazardous and should be avoided. “Broken back curves” are
curves connected with a short segment of tangent. When the use of “broken back”
alignment with a short tangent cannot be avoided, consideration must be given to
designing the tangent section so that all travel lanes slope in the same direction as the
superelevation of the curves. This avoids the introduction of two flat spots on the travel
lane toward the outside of the curves and may prevent the development of an unsightly
dip on the edge of the pavement that can affect driver comfort and drainage.
The types of curves used for horizontal geometry are as follows;
• Simple Circular Curves
• Compound Curves
• Reverse Curves
• Similar Curves
• Transition Curves
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 46
07.07 Simple Circular Curves
Simple Circular Curves are just plain circular curves whose design will be governed by
following factors.
• Minimum radius of curve for superelevation development requirement.
• Minimum length of curve.
The minimum curve radius is designed with the following objectives in view.
• The design speed of the curve should represent the speed below which most
drivers operate.
• The tendency of slow moving vehicles to track towards the centre.
• Stability of high laden commercial vehicles.
• Length available to introduce the necessary superelevation.
For a design speed (V), the minimum curve radius (Rmin) can be determined from the
following equation using the maximum values for superelevation (emax) and maximum
side friction (fmax)
Where;
Rmin -Minimum Radius
V -Design Speed in kmph
emax -Maximum superelevation
fmax -Maximum side friction.
Minimum radii calculated by the above equation is tabulated in Table 7.2
Table 7.2: Minimum Radii for Different Superelevations
Design Speed Superelevations (%)
Kmph 2.5 3.0 4.0 5.0 6.0 7.0 8.0 9.0 10.0
30 35 30 30 30 30 30 25 25 25
40 60 60 55 55 55 50 50 45 45
50 105 100 95 90 9 85 80 80 75
60 155 150 145 135 130 125 120 115 110
70 225 215 205 195 185 180 170 165 155
80 310 300 280 270 255 240 230 220 210
90 415 400 380 355 340 320 305 290 280
100 515 500 470 445 420 400 380 365 350
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 47
07.07.1 Adverse Crossfall
Adverse crossfall is a concept used in the horizontal alignment design. This basically
means that higher the radius, lesser the centrifugal force becomes so such a small force
can be balanced by the friction force alone. In such cases, superelevating the roadway is
not going to be essential.
Minimum Radii for adverse crossfall are tabulated in Table 7.3
Table 7.3: Minimum Radii for Different Superelevations (Adverse Crossfall)
Design Speed Minimum Radii for Adverse Crossfall
(kmph) (m)
Open Built up
30 205 160
40 360 280
50 565 440
60 810 630
70 1105 860
80 1440 1120
90 1825 1420
100 2250 1750
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
It is important that the Horizontal curve length being sufficient to accommodate the
superelevation. In designing the length of curve, attention should be given to design either
larger curves which accommodate a constant superelevation over a length at least equal to
the superelevation development length or a curve which can safely have adverse crossfall.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 48
07.08 Transition Curves
Any motor vehicle follows a transition path as it enters or leaves a circular horizontal
curve. The steering change and the consequent gain or loss of centrifugal force cannot be
effected instantly. For most curves the average driver can effect a suitable transition path
within the limits of normal lane width. However, with combinations of high speed and
sharp curvature the resultant longer transition can result in crowding and sometimes
actual occupation of adjoining lanes. In such instances transition curves would be
appropriate because they make it easier for a driver to confine the vehicle to his or her
own lane. The employment of transition curves between tangents and sharp circular
curves and between circular curves of substantially different radii warrants consideration.
Figure 7.3: A Graphical Illustration of a Transition Curve
The main advantages of employing transition curves in horizontal alignment are as
follows;
• A properly designed transition curve provides a natural, easy to follow path for
drivers, such that the centrifugal force increases and decreases gradually as a
vehicle enters and leaves a circular curve. This transition curve minimizes
encroachment on adjoining traffic lanes and tends to promote uniformity in speed.
• The transition curve length provides a convenient desirable arrangement for
superelevation runoff.
• The spiral facilitates the transition in width where the traveled way section is to be
widened around a circular curve. Use of spiral provides flexibility in the widening
of sharp curves.
• The appearance of the highway or street is enhanced by the application of spirals.
Their use avoids the noticeable breaks at the beginning and ending of circular
curves.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 49
07.09 Compound Curves
A compound curve is a series of two or more single curves that run in the same direction
and join in a common tangent point. In the places where the topography of the portion of
an existing control such as Bridge or level crossing does not permit to use a single curve,
a simple curve with two radii may be adopted. As a general rule compound curves are
avoided wherever possible and the single curves are used instead.
In case the necessity of compound curve is inevitable, the radius of the flatter curve
should not be more than 50% great than the radius of the sharper curve. Nevertheless, the
use of compound curves provides the designer with a flexible tool to better fit the
highway to the terrain and other ground controls.
Figure 7.3: A Graphical Illustration of a Compound Curve
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 50
07.10 Reverse Curves
A Reverse Curve is a curve of opposite direction with common or near common tangent
points. Accounting for the difficulty in altering the superlevation direction, reverse curves
with common tangent points should be avoided as much as possible. Yet the reverse
curves are unavoidable under following conditions.
• If the plan transitions are used.
• If the curve radius is greater than the radius for which transition is not required.
• Where circular curves are used without transition the true reverse curve
arrangement should be avoided by separating the tangent points by a distance so
that the suprelevation development could be suitably achieved.
Figure 7.3: A Graphical Illustration of a Reverse Curve
07.11 Similar Curves
It should be noted that the similar curves linked by short tangents are undesirable on the
ground of both appearance and safety. The maximum length of the short tangent is
selected so as to not to have much visual or practical effect and the minimum length of
long tangent is selected so as to give visual and practical separation of two curves.
• The maximum short straight to be used with minimum radius curves of the order
of 0.6V meters
• The minimum long straight should be between 3V and V meters.
Where V is in kmph. It has to be further emphasized that where a minimum straight is not
available, the use of smaller radius curve may suffice to give additional tangent distance.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 51
07.12 Widening of Carriageway on Curves
Carriageways need to be widened on some curves because a vehicle passing through a
curve occupies a greater width of the road compared to its motion on a straight. Curves
are widened to avoid difficulty in steering the vehicles in the centre of the lane. The
amount of widening required depends on;
I. Radius of the curve.
II. Vehicle length and width.
III. Width of lane on straight.
IV. Lateral clearance between two vehicles.
In general practice minimum amount of widening is limited to 0.6m.
AASHTO Green Book gives the amount of widening of the traveled way on a horizontal
curve as the difference between the width needed on the curve and the width used on a
tangent. It is given by following equation.
Where;
w -Widening of traveled way on curve (m)
Wc -Width of traveled way on curve (m)
Wn -Width of traveled way on tangent (m).
Further, this phenomenon is best described by the Exhibit 3-50 of AASHTO Green Book
reproduced here as Fig. 9.4
Figure 7.4: Widening components on open highway curves
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 52
Figure 7.5: Widening applied to a Curve in a Highway
Following equation is given to calculate the Wc in AASHTO Green Book
Where;
N -Number of lanes
U -Track width of design vehicle (out to out tires) (m)
C -Lateral clearance (m)
FA -Width of front overhang of inner lane vehicle (m)
Z -Extra width allowance (m)
Track width of design vehicle can be derived by following equation. AASHTO Green
Book
Where;
U -Track width on curve (m)
u -Track width on tangent (out-out of tyres) (m)
R -Radius of curve on turn (m)
Li -Wheelbase of design vehicle between consecutive axles (or sets of tandem axles)
and articulation points (m)
AASHTO Green Book further expresses that the lateral clearance allowance, C, provides
for the clearance between the edge of the traveled way and nearest wheel path and for the
body clearance between vehicles passing or meeting. Lateral clearance per vehicle is
assumed to be 0.6, 0.75, and 0.9 m [2.0, 2.5, and 3.0 ft] for tangent lane widths, Wn,
equal to 6.0, 6.6, and 7.2 m [20, 22, and 24 ft], respectively.
The width of the front overhang (FA) is the radial distance between the outer edge of the
tire path of the outer front wheel and the path of the outer front edge of the vehicle body.
For curves and turning roadways, FA depends on the radius of the curve, the extent of the
front overhang of the design vehicle, and the wheelbase of the unit itself. In the case of
tractor-trailer combinations, only the wheelbase of the tractor unit is used. FA values are
determined from the following equation as given by the AASHTO Green Book
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 53
Where;
FA -Width of front overhang
R -Radius of the curve (m)
A -Front overhang of inner lane vehicle (m)
L -Wheelbase of single unit of tractor.
AASHTO Green Book quotes that the extra width allowance (Z) is an additional radial
width of pavement to allow for the difficulty of maneuvering on a curve and the variation
in driver operation. This additional width is an empirical value that varies with the speed
of traffic and the radius of the curve. The additional width allowance is expressed as:
Where;
Z -Extra width allowance
V -Design speed of the highway (km/h)
R -Radius of the curve (m)
The current Sri Lankan Standards, RDA has derived the values for curve widening for the
assumed design condition of an SU vehicle and a two lane highway.
Listen to a Lecture!
https://youtu.be/zKWQWZoXkWU?feature=shared
https://youtu.be/-hrVY1IpwE8?feature=shared
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 54
CHAPTER 08: DESIGN OF HORIZONTAL ALIGNMENT
08.1 Introduction
A Horizontal Alignment of a road is defined as a series of straights and circular curves
connected by transition curves indicating the path of the road in plan. Further, the
tangents may directly be connected where a transition curve could be omitted.
The types of curves used for horizontal geometry are as follows;
• Simple Circular Curves
• Compound Curves
• Reverse Curves
• Similar Curves
• Transition Curves
08.2 Starting an Alignment in Civil 3D
A Civil 3D Alignment is started as follows;
• Open a new drawing with your template.
• Save it in the Alignment folder naming it Alignment.dwg.
• File→Import→Import LandXML
• Browse to the required folder and select Surface.XML.
• Press Open.
• Import LandXML dialog box will appear.
• Press OK.
• Now the surface will be imported.
• You can change the surface style to display Contours Triangles & Boarders if necessary.
• Paste the Surveyor’s drawing to original coordinates.
• Save the Alignment.dwg file
• From main menu, get Alignments→Create alignment by lay out.
• ‘Create Alignment Layout’ dialog box will appear.
• Change the parameters appropriately.
• Press OK.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 55
A Snapshot of the Create Alignment Dialog Box
• Then the Alignment Layout Tools will prompt.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 56
08.3 First Element of the Alignment
First Element of the Alignment should usually be a “Fixed Line” or a “Fixed Curve”
Tool Bit for the Fixed Line
Tool Bit for the Fixed Curve
08.4 Design of a Simple Circular Curve
A Simple Circular Curve is a curve engaged between two tangents. Following are the two
major methods engaged in designing of a Simple Circular Curve in Civil 3D.
• Tangent-Tangent (No Curve) Method
• Floating Curve Method
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 57
08.4.1 Tangent-Tangent (No Curve) Method
In this method, the designer is using the method of drawing two tangents and engaging a
curve in between them.
• Draw two tangents using Tangent-Tangent (No Curves) tool bit
Tangent-Tangent (No Curves) Tool Bit
Two Tangents drawn using the Tangent-Tangent (No curves) tool bit
• Select “Free Curve Fillet (Between two entities, radius) tool bit
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 58
• “Select First Entity” will prompt in the command line
• Select the first Straight
• “Select Next Entity” will prompt in the command line
• Select the next Straight
• Is Curve Solution Angle (Greater than 180 Lesser than 180) will prompt.
• Select Lesser than 180
• Specify Radius will prompt
• Give the radius
• The curve will be drawn
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 59
08.4.2 Floating Curve (From Entity, Radius, Through Point) Method
In this method, the Designer is using a Curve tangential to the immediate Straight before
it, give the radius and specify the point the curve should pass. This method is highly
useful for the rehabilitation projects where the liberty to deviate from the existing centre
line is limited.
Floating Curve (From entity, radius, through point) tool bit
• Select “Floating Curve (From entity, radius, through point) tool bit.
• “Select entity to attach to” will prompt in the command line.
• Select the Straight
• “Specify Radius” will prompt in the command line.
• Give the radius
• Is Curve Solution Angle (Greater than 180 Lesser than 180) will prompt.
• Select Lesser than 180
• “Specify end point” will prompt in the command line.
• Specify the end point to match with the existing Centre Line.
• Press Enter
• The curve will be drawn.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 60
08.4.3 Floating Line
Once a Simple Curve is designed using the above 3.3.2 Method, the necessity of a
floating line can arise.
Floating Line (From curve, through point) tool bit
• Select “Floating Line (From curve, through point) tool bit.
• “Select entity to attach to” will prompt in the command line.
• Select the Curve
• “Specify end point” will prompt in the command line.
• Specify the end point to match with the existing Centre Line.
• Press Enter
• The Straight will be drawn.
•
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 61
08.5 Design of Compound Curves
Compound curves are the curves which are same in direction and have the same point as
the end point of the first curve and the beginning point of the next curve.
• Select “Floating Curve (From entity, radius, through point) tool bit.
• “Select entity to attach to” will prompt in the command line.
• Select the Curve
• “Specify Radius” will prompt in the command line.
• Give the radius
• Is Curve Solution Angle (Greater than 180 Lesser than 180) will prompt.
• Select Lesser than 180
• “Is curve compound or reverse to curve before?” will prompt in the command line.
• Select Compound
• “Specify end point” will prompt in the command line.
• Specify the end point to match with the existing Centre Line.
• Press Enter
• The Curve will be drawn.
08.6 Design of Reverse Curves
Reverse curves consist of adjacent curves with a common tangent point but not
unidirectional.
• Select “Floating Curve (From entity, radius, through point)” tool bit.
• “Select entity to attach to” will prompt in the command line.
• Select the Curve
• “Specify Radius” will prompt in the command line.
• Give the radius
• “Is Curve Solution Angle (Greater than 180 Lesser than 180)” will prompt.
• Select Lesser than 180
• “Is curve compound or reverse to curve before?” will prompt in the command line.
• Select “Reverse”
• “Specify end point” will prompt in the command line.
• Specify the end point to match with the existing Centre Line.
• Press Enter
• The Curve will be drawn.
08.7 Design of Transition Curves
Transition curves are usually used in Expressways. There is a tool bit for the transition
curves in the Alignment tool bar which is self-explanatory.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 62
08.8 Quick Profile Function to aid the Alignment Design
The original Surface drawn in Chapter (2) was by using the levels obtained from the Total
Station. These levels are not that accurate and cannot be used for the detailed Vertical
Alignment Design. The significance of these levels are mainly to get a coarse idea of the
topography of the terrain the road is running and to adjust the Horizontal Alignment
accordingly. A quick cross section of the road at any preferred location can be drawn as
follows;
• Draw a short line cutting the Design Centre Line
• [RC] Quick Profile
• ‘Create Quick Profiles’ dialog box will appear.
• Change the Profile View Style = customized (RDA style)
• Press OK
• ‘Select Profile View Origin’ will prompt in the command line
• Give a suitable location.
• Road Cross Section along the line will be drawn.
A Snapshot of a Quick Profile drawn along a random line
Once the Alignment is done, save the drawing.
08.9 Design Centre Line Labels
The Design Centre Line needs to be labelled with curve radii, straight lengths etc to make
sure that it was designed fulfilling all the design requirements.
• Main Menu→Alignments→Add Tables→Renumber Tags
• ‘Select label to renumber tag or (Settings)’ will prompt in the command line
• Select Settings and Enter
• ‘Table Tag Numbering’ dialog box will appear.
• Change all the values to 1
• Press Apply & OK
• Main Menu→Alignments→Add Alignment Labels→Multiple Segment
• ‘Select Alignment’ will prompt in the command line
• Select the Alignment
• Labels will appear in the Alignment
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 63
A Snapshot of the Alignment with Labels
08.10 Design Centre Line Coordinates
The Design Centre Line should be marked on the road to do the fine adjustments if any,
after site visits. For this, the Design Centre Line Coordinates should be generated and
delivered to the Surveyor.
• Main Menu→General→Toolspace→Toolbox
• Reports Manager→Alignment→[DC] Incremental Stationing Report
• ‘Create Reports Alignment Incremental Stationing Report’ dialog box will appear.
• Change the parameters as per the requirement and press ‘Create Report’
• Alignment Incremental Station Report will pop up.
This may be copied to an Excel sheet to do the required adjustments before delivering to
the Surveyor.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 64
Listen to a Lecture!
https://youtu.be/_Wasp9wQ5ws
https://youtu.be/rf296A4j1-A?feature=shared
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 65
CHAPTER 09: THEORY OF SUPERELEVATION
09.1 Introduction
Cant, camber or superelevation, is the difference in elevation of two road edges.
Designers ensure that a curved road is sloped so it is higher on the outside of the curve.
Superelevation allows part of a vehicle’s weight to assist in maintaining a circular path. It
reduces the required amount of side friction between the tyres and road surface when
driving a circular path. This is important for the safety and comfort of all road users.
The amount of superelevation depends mainly on the operating speed of the curve and the
curve radius, with more superelevation applied on tighter curves. However, with the need
to drain water off the road surface there is a minimum amount of superelevation applied
to all curves.
Figure 09.1: A Photograph of a Superelevated Highway Curve
There are several factors limiting how much superelevation to use, including:
• Stability of high laden commercial vehicles
• Stability of loads on trucks
• Tendency of the rear wheels of slow moving vehicles to track towards the centre
of the turn
• Appearance, particularly in flat terrain and in urban areas
• Effect on out-of-control vehicles leaving the inside of the curve
• Tendency of vehicles to slide on the road surface in frost/icy conditions.
If the section of road includes a bridge, intersection or level crossing, then superelevation
is more difficult to design and construct.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 66
Figure 10.2: An Illustration of the Superelevation Development along a Curve
09.2 Superelevation Standards
The superelevation adopted is selected for safety, comfort and appearance. Use of
maximum superelevation should be restricted to mountainous terrain or places where
there are physical obstructions which limit the radius of the particular curve with respect
to the adjacent curves. The superelevation development should be done gradually over a
distance without appreciable reduction in speed or safety and with comfort.
The maximum superelevation varies from 10% in mountainous terrain and 8% in rolling
terrain to 6% in flat terrain.
09.3 Axis of Rotation
The crossfall is rotated about a line in order to adopt superelevation development at the
curves. That line is defined as the axis of rotation. Position of the axis of rotation depends
upon the type of terrain and type of the road. For two lane undivided road usually the
centre line of the road is taken as the axis of rotation. In the case of wide medians it is
general practice to assume the median edge of pavement or shoulder as the axis of
rotation.
09.4 Superelevation Development Length
A change from normal cross fall to super-elevation occurs as the road changes from a
straight to curved alignment. The length required to develop super-elevation should be
adequate to ensure a good appearance and give satisfactory riding qualities.
There are number of methods to calculate the superelevation development length among
which following hold the dominancy in Sri Lankan practice.
• Relative Gradient Method.
• Rate of Pavement Rotation Method
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 67
09.4.1 Relative Gradient Method
The minimum length of superelevation development from this method can be calculated
from the following equation.
W (e + n )
Le =
Gr
Where;
Le = Length of superelevation development (m)
W = Lane Width (m)
e = Superelevation
n = Normal crossfall
Gr = Relative gradient (Refer table 10.1)
Maximum relative gradients are shown in Table 09.1
Table 09.1: Maximum Relative Gradient
Maximum Relative Gradient
Design
Speed(kmph)
1 Lane 2 Lane >2 Lane
30 1.00 1.50 2.00
40 0.83 1.25 1.66
50 0.71 1.07 1.42
60 0.63 0.95 1.26
70 0.56 0.84 1.12
80 0.50 0.75 1.00
90 0.45 0.68 0.90
100 0.42 0.63 0.84
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
09.4.1 Rate of Pavement Rotation Method
The rate of rotation is defined as a change in the crossfall from normal crossfall to full
superelevation over the time, required by a vehicle traveling as the design speed along the
length where the change occurs.
The length of superelevation development is given by following expression.
(e + n)V
Le =
3.6
Where;
Le = Length of superelevation development (m)
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 68
V = Design speed (kmph)
e = Superelevation
n = Normal crossfall
= Rate of pavement rotation (rad/s)
The rate of pavement rotation is recommended to be 0.035rad/s for design speeds less
than 80kmph and to be 0.025rad/s for design speed greater or equal to 80kmph.
The maximum value given from above two equations is taken as the superelevation
development length by rounding to next highest multiple of three.
09.5 Superelevation Development for Different Curves
Superelevation is achieved gradually starting from the tangent section and proceeding up
to the curve. Various mathematical relations can be derived based on the basics for this
phenomena. Sections 09.5.1 to 09.5.4 elaborates the method of superelevation calculation
for each curve type. They are derived based on the abbreviations described in Table 09.2
Table 09.2: Abbreviations used to derive Mathematical Relations
Abbreviation Full text
BFS Begin full super
BNC Begin normal crown
CT Curve tangent point
CTP Common tangent point
e1 Degree of superelevation of first curve
e2 Degree of superelevation of second curve
EFS End full super
ENC End normal crown
LC Level crown
Length of superelevation development of the first curve
Le1
Length of superelevation development of the second curve
Le2
LHS Left hand side of roadway
n Normal crown (=2.5%)
RC Reverse crown
RHS Right hand side of roadway
TC tangent to curve point
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 69
09.5.1 Superelevation Development for a Simple Circular Curve
Simple curves are those isolated curves encountered in highways. They do not get any
influence from the other curves because they are far away from other curves’ vicinity.
The schematic diagram of a simple curve is shown below.
Figure 09.3: A Schematic Diagram of a Simple Curve Superelevation
Table 09.3: Critical Superelevation Points of a Simple Circular Curve
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 70
09.5.2 Superelevation Development for a Reverse Curve
Reverse curves consist of adjacent curves with a common tangent point but not
unidirectional. The schematic diagram of two such curves is shown below.
Figure 09.4: A Schematic Diagram of a Reverse Curve Superelevation
Table 09.4: Critical Superelevation Points of a Reverse Curve
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 71
09.5.3 Superelevation Development for a Closely Spaced Reverse Curve
Closely spaced reverse curves are two adjacent curves with a closely spaced tangent point
but not unidirectional. The distance between the CT point of the first curve and TC point
of the second curve should be lesser than 0.7 x (Le1 + Le2).
The schematic diagram of two such curves is shown below.
Figure 09.5: A Schematic Diagram of a Closely Spaced Reverse Curve Superelevation
Table 09.5: Critical Superelevation Points of a Closely Spaced Reverse Curve
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 72
09.5.4 Superelevation Development for a Compound or Closely Spaced Compound
Curve
Compound curves are the curves which are same in direction and have the same point as
the end point of the first curve and the beginning point of the next curve. There are 3
instances that need to be considered in this scenario.
e1 = e2
e1 e2
e1 e2
However, it is obvious that in the first case, e1 = e2, the two curves behave identically as a
simple curve. So the same theory used in simple curve is adopted. Other two scenarios
are described below.
A schematic diagram of two compound curves is given below for the situation e1 e2
Figure 09.5: A Schematic Diagram of a Compound or Closely Spaced Compound Curve
Superelevation
The case e1<e2 would be the mirror image of the above diagram and hence not
elaborated.
Table 09.5: Critical Superelevation Points of a Compound and Closely Spaced Compound
Curve
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 73
For the Closely Spaced Compound Curves, Common Tangent Point (CTP) is to be
calculated by proportionately distributing the length L = TC2-CT1 according to e1 & e2.
All other critical point equations remain intact provided CTP is substituted with the new
value of closely spaced compound curves in above equations.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 74
CHAPTER 10: DESIGN OF SUPERELEVATION
10.1 Introduction
Cant, camber or superelevation, is the difference in elevation of two road edges.
Designers ensure that a curved road is sloped so it is higher on the outside of the curve.
Superelevation can be conveniently entered using the tools available with the Civil 3D.
10.2 Superelevation Terminology in Civil 3D
Civil 3D uses a distinct terminology for the critical points of superelevation development
that may seem peculiar to the beginner. A good understanding of this terminology is a
prerequisite. The Superelevation terminology is described below;
A Figure depicting the critical points of superelevation
SN Abbreviation Description
1 ENC End Normal Crown
2 RC Reverse Crown
3 BFS Begin Full Super
4 EFS End Full Super
5 BNC Begin Normal Crown
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 75
10.3 Entering Superelevation Values (Manual Method)
The superelevation can be calculated either manually or using an Excel Sheet prepared
for this purpose. The manual method is as follows;
• Toolspace→Sites→Site (No)→DCL
• [RC] Edit Superelevation
• Select “Open the Superelevation Curve Manager” from the incoming dialog box.
• Superelevation Curve Manager will appear
• Press Tabular Editor
Here, all the curves in the Alignment are displayed in the Tabular Editor.
A Snapshot of the Tabular Editor
• [RC] on the Curve.1→Add Station
• ‘Specify station along baseline’ will prompt in the command line
• Usually the beginning point of the alignment should be given here (even if it is not a
superelevation critical point as per the calculation)
• Type the begin point Chainage and press Enter
• It will be added to the Tabular Editor
•
• [RC] Manual Station→Assign Critical Station
• All the critical station options will be displayed as a dropdown list
• Usually, the begin station is given the “Begin Normal Crown” value
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 76
• Type the relevant superelevation values for all the required shoulders and lanes depending on
the road cross section.
• Add all the critical points under each curve as described above
It should be noted however, that the Civil 3D displays the Superelevation diagram only in
the Profile View (Vide Chapter 5)
10.4 Entering Superelevation Values (Using SupEl-1000C Excel Sheet)
Civil 3D versions after 2013 allow the users to do the superelevation calculations in a
third party program, save it in .csv format and import to the Civil 3D. Such a Macro
enabled program developed by this author is widely used to do the superelevation
calculation.
• Get a Copy of the SupEl-1000C.xls file and open it
• Enable Macros
• Select the Alignment in Alignment.dwg file→[RC] Edit Alignment Geometry
• ‘Alignment Layout Tools’ will prompt. Select ‘Alignment Grid View’
• ‘Alignment Entities’ dialog box will appear.
• [RC] Copy All
• In the SupEl-1000C.xls file, paste the values to the A1 Cell of RD1 Sheet
• In the Alignment.dwg file, Toolspace→Report Manager→Alignment→[DC] Alignment_Curve
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 77
• ‘Export to XML Report’ dialog box will appear
• Press OK
• Save the resulting file in the relevant folder
• Copy All from the resulting XML file
• In the SupEl-1000C.xls file, paste the values to the A1 Cell of RD2 Sheet
• Press ‘Extract Data’ button in the Data sheet
• All the relevant data will be extracted
• Now in the Design Sheet, give relevant details
• Press the Calculate button
• The superelevation will be calculated and displayed in the Output sheet
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 78
• Save this Sheet in .csv format
• In the Alignment.dwg file:
• Toolspace→Sites→Site (No)→DCL
• [RC] Edit Superelevation
• Select “Open the Superelevation Curve Manager” from the incoming dialog box.
• Superelevation Curve Manager will appear
• Press ‘Tabular Editor’
• Press ‘Import superelevation data from file’
• Browse to the created .csv file and open
• ‘Superelevation Import’ dialog box will appear
• Press OK
• Press ‘Accept All Data’ if prompted
Now the superelevation is entered. Last curve needs to be corrected manually. It should
be noted however, that the Civil 3D displays the Superelevation diagram only in the
Profile View (Vide Chapter 5)
Listen to a Lecture!
https://youtu.be/t59yd2YFVAU?feature=shared
https://youtu.be/HMqhHbifNnI?feature=shared
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 79
CHAPTER 11: THEORY OF VERTICAL ALIGNMENT
11.1 Introduction
The vertical alignment is necessary for the determination of the elevation of highway
points to ensure proper roadway drainage and an acceptable level of safety. The transition
of roadway elevation between two grades is the primary challenge of vertical alignment.
This transition is effectively achieved by means of a vertical curve. Usually the
longitudinal profile of a road consists of straight gradients and vertical curves. The
function of a vertical curve not only limits to smoothing the passage of a vehicle from one
gradient to another but to increase the sight distance over crests at the junction of the
gradients.
Vertical curves can be broadly categorized to two categories namely;
• Crest Vertical Curves.
• Sag Vertical Curves.
11.2 General Considerations
The following general controls for vertical alignment should be kept in view in designing
the vertical profile of a road.
• The selected grade line shall be smooth with gradual changes, consistent to class
of the road and terrain type.
• Two vertical curves in the same direction separated by short section of tangent
grade should be generally avoided.
• On long grades it may be preferable to place the steepest grade at the bottom and
flatten the grade at shorter intervals of lighter grade instead of uniformly sustained
grade.
• Hidden type of profile should be avoided as it is hazardous and aesthetically
unpleasant.
11.3 Vertical Curves
In connecting roadway tangent grades with an appropriate vertical curve, a mathematical
relationship defining roadway elevations at every point is necessary. A parabolic function
has been found suitable in this regard because among other things, it provides a constant
rate of change and implies equal curve tangents. The reason for the traditional preference
of a parabolic equation is the convenience of manual calculation. The basic parabolic
equation derived to calculate the elements of a vertical curve is as shown below.
A
Y= X2
200 LV
Where:
Y = Vertical distance from tangent to the curve (m)
X = Horizontal distance from the start of the vertical curve (m)
A = Algebraic difference in gradients (%) [g1-g2]
LV = Length of vertical curve (m)
Following figure illustrates the basic mathematical model for the parabolic curve.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 80
Figure 11.1: The Basic Mathematical Model for a Vertical Curve
A useful vertical property can be recognized as one that simplifies the computation of the
high and low points of crest and sag vertical curves, respectively (given that the high or
low point does not occur at the curve ends, PVC or PVT). The relationship so derived is
as follows.
LV
K=
A
Where;
K = Length required for 1% change of grade (m per %)
LV = Length of vertical curve (m)
A = Algebraic Difference in Gradients (%)
11.4 Crest Vertical Curves
11.4.1 General
These are the convex vertical curves which are also known as summit curves. In these
curves, it is general practice to determine the minimum length by considering the sight
distance or approximately by appearance requirements. The following figure illustrates
the types of crest vertical curves.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 81
Figure 11.2: Crest Vertical Curves
The length of crest curve is decided on considering few criteria.
• Sight distance criterion
• Appearance criterion
• Comfort criterion
• Drainage criterion
• Allowable grade change without a vertical curve
11.4.2 Sight Distance Criterion
In providing adequate sight distance on a vertical curve, the length of curve (L V) is the
prime concern. Longer lengths of curve provide more sight distance, all else being equal
but are most costly to construct, while the shorter curve lengths are relatively inexpensive
to construct but may not provide sufficient sight distance.
In crest curves, it is the vertical geometry of the road that obstructs the driver’s sight line.
A typical diagram that demonstrates the stopping sight distance in a crest curve is
illustrated in following figure
Figure 11.3: The Stopping Sight Distance Consideration for the Crest Vertical Curves
So, it is possible to show the following relationships considering the parabolic properties
of the vertical curves.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 82
Case I
This considers the situation where the sight distance (S) is lesser than the length of
vertical curve (LV) i.e. S<LV
AS 2
LV =
200( h1 + h2 ) 2
Where:
LV = Length of vertical Curve (m)
S = Sight Distance (m)
h1 = Driver’s eye height
h2 = Object height
A = Algebraic difference in gradients (%)
The sight distance so calculated is shown in the following Table
Table 11.1: Minimum Crest Vertical Curve Length based on Sight Distance Criterion
Design Length of Vertical Curve in meters for 1% Algebraic difference in gradients
Speed (K-Value) based on the criteria of Stopping Sight Distance (SSD),
(Kmph) Continuation Sight Distance (CSD) and Overtaking Sight Distance (OSD)
SSD SSD SSD
h1=1.05 h1=1.05 h1=1.05
h2= 0.2 h2=1.15 h2=1.15
30 2.1 4.1 29.1
40 4.7 9.2 55
50 9.8 19.2 89.1
60 17 33 139.3
70 31 60 210.2
80 45 89 307.4
100 97 191 541.3
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
Case II
This considers the situation where the sight distance (S) is greater than the length of
vertical curve (LV) i.e. S>LV
200( h1 + h2 ) 2
LV = 2S −
A
Where:
LV = Length of vertical Curve (m)
S = Sight Distance (m)
h1 = Driver’s eye height
h2 = Object height
A = Algebraic difference in gradients (%)
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 83
11.4.3 Appearance Criterion
It is obvious that a vertical curve has little influence other than the appearance of the
profile at very small changes of grade. Therefore they can be omitted in the design.
Following Table gives vertical curve lengths on the basis of appearance.
Table 11.2: Minimum Crest Vertical Curve Length based on Appearance Criterion
Design Maximum Grade Change Length of Vertical Curve for Satisfactory
Speed without Vertical Curve (%0 Appearance (m) [3 Seconds Travel Distance]
(kmph)
30 1.3 30
40 1.3 40
50 1.0 50
60 0.8 50
70 0.7 60
80 0.6 70
100 0.3 90
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
11.4.4 Comfort Criterion
The length of vertical curve for comfort criterion is provided to minimize the discomfort
felt by a human being subject to rapid changes in vertical acceleration. It is usual practice
to limit the vertical acceleration to a value lesser than 0.05 x gravitational acceleration
(g).
The following equation gives the acceleration normal to the curve due to traversing the
path of parabolic vertical curve at uniform speed.
v2 A v2
a= =
100 Lv 100 K
Where:
a = Vertical component of acceleration
v = Speed of the vehicle (m/sec)
A = Algebraic difference in gradients (%)
Lv = Length of vertical curve (m)
K = Lv/A
The adopted design value for ‘a’ is 0.03g. The values of K for specific design speeds and
vertical acceleration of 0.03g are shown in the following Table
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 84
Table 11.3: Minimum Crest Vertical Curve Length based on Comfort Criterion
Design Speed Length of vertical curve in meters for 1%
(kmph) algebraic difference in gradients (K-value)
based on comfort criterion for vertical
acceleration of: 0.03g
30 2.4
40 4.2
50 6.5
60 9.4
70 13
80 17
100 26
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
11.4.5 Drainage Criterion
Minimum longitudinal grade on kerbed pavement should be 0.30 % for satisfactory
drainage. There is a level point on a crest vertical curve, but no difficulty with drainage
on kerbed pavement experienced if the curve is sharp enough so that the minimum grade
of 0.30 % is reached at a point about 15 m from the crest. This corresponds to a K value
of 45 m per percent change in A.
11.4.6 Allowable Grade Change without a Vertical Curve
Curves should be provided at all grade changes exceeding the values as shown in Table
under appearance criterion.
11.5 Sag Vertical Curves
11.5.1 General
These are the concave vertical curves. In these curves, it is general practice to determine
the minimum length by considering approximately by comfort related to vertical
acceleration, appearance or on a slightly deterministic basis, by drainage, head light
performance or overhead restrictions to the line of sight. The Fig. 7.2 illustrates the types
of sag vertical curves.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 85
Figure 11.4: Sag Vertical Curves
Sag vertical curve design differs from crest vertical curve design owing to the fact that the
sight distance is governed by night time conditions. This is because that the sight distance
on a sag vertical curve is unrestricted in daylight. Therefore the critical concern for sag
vertical curve is the headlight sight distance which is the length of the road illuminated by
the vehicle’s headlights.
The length of sag curve is decided on considering few criteria.
a) Sight distance criterion based on head light criterion
b) Sight distance criterion based on overhead obstructions criterion
c) Appearance criterion
d) Comfort criterion
e) Drainage criterion
f) Allowable grade change without a vertical curve
11.5.2 Sight Distance Criterion based on Head Light Criterion
A typical diagram that demonstrates the length of sag vertical curve for head light
criterion is illustrated in Fig. 11.3
Figure 11.3: The Length of Sag Curve based on Head Light Criterion
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 86
Figure 11.4: A Photographic Illustration of Head Light Criterion
Considering the parabolic properties of vertical curves, following equation is derived for
sag curves.
AS 2
Lv =
150 + 3.5S
Where:
Lv = Length of vertical curve (m)
A = Algebraic difference in gradients (%)
S = Sight distance (m)
Table 11.4: Minimum Sag Vertical Curve Length based on Head Light Sight Distance
Criterion
Design Speed (Kmph) Minimum length of vertical sag curves based on
Head Light Criterion
30 4.0
40 7.3
50 12
60 17
70 25
80 32
100 50
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 87
11.5.3 Sight Distance Criterion based on Overhead Obstruction Criterion
The sight distance available on sag vertical curves can be limited by the overhead
obstructions such as road or rail overpasses or overhanging trees etc. These would not
interfere with minimum stopping sight distance.
Figure 11.5: A Photographic Illustration of Overhead Obstruction Criterion
Length of vertical curve over sags with overhead structure based on sight distance criteria
is given by following equation;
S2A
Lv =
200( ( H − h1 ) + ( H − h2 ) ) 2
Where:
Lv = Length of vertical curve (m)
A = Algebraic difference in gradients (%)
H = Height of obstruction (m)
h1 and h2 are eye height and object cutoff height.
11.5.4 Appearance Criterion
The requirements are same as the crest vertical curves.
11.5.5 Comfort Criterion
The requirements are same as the crest vertical curves.
11.5.6 Drainage Criterion
The requirements are same as the crest vertical curves.
11.5.7 Allowable Grade Change without a Vertical Curve
The requirements are same as the crest vertical curves.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 88
11.6 Grades
The gradient of a line is its longitudinal slope and is expressed as the ratio of the
difference in height, of its two ends, to the length between them. On gradients, vehicles
have to change gears and cause disparities in speeds between vehicles. This affects the
quality of service. The gradient in the vertical alignment can take different values based
on the topography of particular area. To characterize variations in topography, it is
generally classified into three regions according to the terrain characteristics.
A terrain where a heavy vehicle can operate in the same speed as a personal car is defined
as a Level Terrain. In level terrain, highway sight distances, as governed by both
horizontal and vertical restrictions, are generally long or can be made to be so without
construction difficulty or major expenses.
A terrain where heavy vehicles operate at a substantially lower speed than a personal car
is defined as a Rolling Terrain. In rolling terrain, natural slopes consistently rise above
and fall below the road or street grade, and occasional steep slopes offer some restriction
to normal horizontal and vertical roadway alignment.
A terrain where heavy vehicles operate at crawl speed is defined as a Mountainous
Terrain. In mountainous terrain, longitudinal and transverse changes in the elevation of
the ground with respect to the road or street are abrupt, and benching and side hill
excavation are frequently needed to obtain acceptable horizontal and vertical alignment.
11.7 Standards for Grades
11.7.1 General
The grade adopted should allow the average vehicle to climb mountain in top gear at the
design speed or move down without excessive breaking. Therefore, to satisfy above
criteria maximum grade should be defined. Also, runoff water should drain along the
road. Therefore, in the places of almost flat terrain, minimum grades are specified.
11.7.2 General Maximum Grades
Maximum gradients vary with the class of road, speed and topography. On high speed
roads, grades close to 3% provide a very satisfactory level of service. On roads with high
design speeds, gradients up to 6% cause no real problems. Gradients over 10% bring
problems of very slow climbing speeds and high downhill speeds for heavy vehicles. In
such places climbing lanes should be provided. However, in order to make the design
economical, following considerations are made before a climbing lane is designed2.
• Upgrade traffic flow rate is in excess of 200VPH.
• Upgrade truck rate is in excess of 20VPH
• One of the following conditions exists.
o A 10mph or greater speed reduction is expected for a typical heavy truck.
o Level of service E or F exists on the grade.
o A reduction of two or more Level of Service is expected.
2
AASHTO standards
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 89
Table 11.4 specifies the maximum gradient based on type of terrain and road class.
Table 11.4: Maximum Gradient based on Type of Terrain and Road Class
Class of road Terrain type Maximum gradient
Flat 4
A Rolling 6
Mountainous 8
Flat 5
B Rolling 7
Mountainous 9
Flat 7
C Rolling 9
Mountainous 10
Flat 9
D Rolling 10
Mountainous 10
Flat 9
E Rolling 10
Mountainous 10
Source: Geometric Design Standards of Roads. Road Development Authority, 1998
11.7.3 Minimum Gradients
Drainage is the main consideration where minimum grades are involved. On flat terrain
the gradient can be flat, provided that normal cross fall is available and length of level
gradient is as small as possible. In rural areas a minimum gradient of 0.5% should be
maintained and in urban areas where pavements are kerbed, minimum gradient should not
be flatter than 0.3%. If the road gradient is flatter than 0.5%, then the drains must be
graded separately from the road centre line to obtain a minimum of 0.5% slope.
11.7.4 Grades Steeper than General Maximum
Accommodation of gradients more than the recommended general maximum gradients
may be justified in the following situations.
1. Comparatively short sections of steep gradients which lead to significant cost
savings.
2. Numbers of heavy vehicles are low.
3. Difficult terrain in which general maximum gradients are not practical.
4. Less important local roads where cost of achieving high standard are difficult
to be justified.
A less important road on a mountainous terrain where maximum gradients are not
practical, gradients of 12-15% may be satisfactory.
Listen to a Lecture!
https://youtu.be/TvUyhRsDl0o?feature=shared
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 90
CHAPTER 12 DESIGN OF VERTICAL ALIGNMENT
12.1 Introduction
The vertical alignment is necessary for the determination of the elevation of highway
points to ensure proper roadway drainage and an acceptable level of safety. The transition
of roadway elevation between two grades is the primary challenge of vertical alignment.
This transition is effectively achieved by means of a vertical curve. Usually the
longitudinal profile of a road consists of straight gradients and vertical curves.
Vertical curves can be broadly categorized to two categories namely;
• Crest Vertical Curves.
• Sag Vertical Curves.
12.2 Offset Method of Surface Creation
12.2.1 Introduction
Once the Alignment is finalized, it is being set out on the road. Cross Section Levels are
taken at 10m or 20m intervals depending on the terrain and the accuracy required. Such
a data set is shown in the following figure.
This is a method used to take levels very accurately using The Level instrument.
However, the levels taken are referenced to a chainage and not into a coordinate point as
in the Total Station. Centre Line is marked on the road initially according to the
coordinates given by the Designer. The levels are taken perpendicular to the road centre
line reference to each chainage.
12.2.2 Surface File for Vertical Alignment
• Open the Civil 3D program and load the customized folder
• Save the drawing in the Surface Folder naming VA Surface.
• Copy the topographic survey from the Surveyor’s file and paste to original coordinates
• Copy the CL Alignment from the Alignment.dwg and paste to original coordinates
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 91
• If the initial EG is also copied, delete the EG in the Toolspace
• If the initial points are also copied, delete them in the Toolspace
• Only the Topographic Survey and the Alignment should be available in the VA Surface File.
12.2.3 Data filtering for TE
As discussed in the Chapter (2), Break Lines are very important in Civil 3D terrain
modelling. Break lines can be drawn only connecting the points taken. So it is necessary
to filter the Break Line Points (TE) to draw them in the new VA Surface file. Tar Edges
which are already drawn in the Topographic Survey file are drawn based on the TS
points. Therefore, they can no longer be considered for the new surface.
• Open the Excel Sheet with new levels data and remove unnecessary texts (Only 4 rows Chaiange,
Offset, Level, Description should be available)
• All the data should be in numerals only.
• If the Chainages are given as 0+000 etc, convert them to numerals.
• There should be no blank rows in between chainages
• None of the cells of these 4 columns should be kept blank
• A minus offset represents a length measured left from the CL point.
A Snapshot of the modified data
• Sort the description column and get the TE rows separately
• Cut and paste them into a separate sheet.
Now it is necessary to get the LHS TE and RHS TE separately. Although it may seem
that TE with a (-) value as the LHS TE and one with a (+) value as the RHS TE, this is
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 92
always not true. If the DCL has shifted to one side altogether, away from the existing
road, both LHS TE and RHS TE will have either (-) or (+) values both.
In order to solve this problem, a simple equation is developed in the Excel as follows, that
effectively filters the LHS and RHS values separately.
Considering F2 Cell;
=IF(A2=A1,IF(B2>B1,"R","L"),IF(A2=A3,IF(B2>B3,"R","L"),"Error"))
• Drag the F2 Cell down to the end of the data rows
• Check the LHS/RHS side of the first row in the drawing and insert
• If any F Cell outputs “Error”, the Surveyor has only taken one TE (either LHS or RHS). Check
with the drawing and insert R or L
• Amalgamate the Side column (L or R) with TE in a separate column
Considering H1 Cell;
==F1&D1
• Drag the H1 Cell to the end of the data rows
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 93
• Cut the H column and Paste to D column (using paste as Values)
• Now sort the D column
• LHS TE will come first followed by RHS TE, in the order of the Chainages.
• Type the following equation in the F1 Cell
Considering F1 Cell;
=A1&","&B1&","&C1&","&D1
• The data will be arranged comma delimited in the F1 Cell.
• Drag the F1 Cell down to the end of the data rows
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 94
• Copy the F column fully to a Notepad File
• Save it as TE
• Apply the same F1 equation to the balance of the points sheet and drag down, copy to Notepad File
and Save it as Total
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 95
12.2.4 Importing Level Data and VA Surface Creation
First task of importing data to VA Surface File is to get the TE points to the Civil 3D File
and draw the required polylines.
• Toolspace→[File Name]→Points→[RC] Create
• ‘Create Points’ dialog box will appear
• Go to ‘Import from File’ as shown
• ‘Import Alignment Station and Offset File’ dialog box will appear
• Browse to TE.txt file and press Open
• ‘Enter File Format’ will prompt in the command line
• Type ‘5’ and Enter
• ‘Enter a delimiter’ will prompt in the command line
• Type ‘2’ and Enter
• ‘Enter an invalid indicator for elevation’ will prompt in the command line
• Type ‘1000’ and Enter
• ‘Enter an invalid indicator for Station Offset’ will prompt in the command line
• Type ‘100’ and Enter
• ‘Select Alignment’ will prompt in the command line
• Select the Alignment
• Only TE points will be imported to the Civil 3D File
• Make Sure our customized Point Set Style is made default. Otherwise the texts will not be
displayed.
Now if the point numbers are closely examined, it will be noticed that the each set of
LHS TE and RHS TE points are numbered sequentially. This facilitates the Designer to
automatically draw both the TE lines, instead of doing it manually.
• Select ‘Create Line by Point# Range’
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 96
• ‘Enter Point Number’ will prompt in the command line
• Type the first point number of LHS TE points and last point number of LHS TE points separated by
a (-) Eg. 1-850
• Lines will be drawn connecting all the points of LHS TE automatically
• Do the same to RHS TE points also.
Then these 2 lines (LHS TE and RHS TE) should be converted to polylines.
After that, the balance data should be imported and the Surface should be created as
described in Section 2.2.
This Surface should be exported as Land XML for future use of the Vertical Alignment.
Since the Surveyor usually does not take existing CL in this Level Survey, it is not
possible to make it a Break Line as we did in the previous chapter.
12.3 Creating the Existing Profile
Existing profile of the road is created using the level data that are obtained through the
Level Instrument. In the previous section (4.2), the Surface related to these data is already
drawn and saved as a LandXML file.
• Open a new drawing with your template.
• Save it in the Profile folder naming it Profile.dwg.
• Copy the DCL Alignment from Alignment.dwg and paste to original coordinates
• Delete EG Surface and Points if they are also imported.
• File→Import→Import LandXML
• Browse to the required folder and select VASurface.XML.
• Press Open.
• Import LandXML dialog box will appear.
• Press OK.
• Now the surface will be imported.
• You can change the surface style to display Contours Triangles & Boarders if necessary.
• Paste the Surveyor’s drawing to original coordinates.
• Save the Profile.dwg file
• Main Menu→Create Profile from Surface
• ‘Create Profile Surface’ dialog box will appear
Here you will see the available surfaces are shown in the Select surfaces panel
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 97
• Select ‘EG for VA’ Surface and press Add
• Press ‘Draw in Profile View’
• ‘Create Profile View-General’ dialog box will appear
• Change the Parameters appropriately and press Next
• Forthcoming dialog boxes ‘Create Profile View-Station Range’, ‘Create Profile View-Profile View
Height’ and ’Create Profile View-Profile Display Options’ need not be changed.
• Press ‘Next’ for each of the three dialog boxes
• ‘Create Profile View-Data Bands’ will appear.
• Change the band set to the preferred one in ‘Select band set:’
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 98
• Press Next
• ‘Create Profile View-Profile Hatch Options’ will appear. No need to change anything
• Press ‘Create Profile View’
• ‘Select Profile View Origin’ will prompt in the command line.
• Select a convenient location.
• Then the Existing profile will be drawn.
• You are at liberty to select the Datum and labelling frequency (10m, 20m etc)
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 99
A Snapshot of the Existing Profile
12.3 Creating the Recambering Profile
12.3.1 Introduction
Usually the roads are cambered towards the centre line. When a new design is done for an
existing road, the New Centre Line does not necessarily follow the exact previous Centre
Line. This rises the need to change the camber towards the new centre line. In doing so,
sometimes the road cutting may be required which is usually not allowed in the
rehabilitation projects. So the recambering is carried out to make sure the minimum
thickness required by the Pavement Design is ensured throughout the road and no road
cutting will take place in the construction.
12.3.2 Creating the Recambering Assembly
The concept of an Assembly is that a Typical Cross Section for the road is drawn using
available sub-assemblies (lanes, shoulders, drains etc) provided in the Civil 3D software.
Then this Assembly is run along the Design Centre Line (DCL) and Finished Road
Profile (FRF) to generate cross sections, volumes etc. This concept will be discussed in
detail later, with the Cross Section Generation.
• Main Menu→Corridors→Create Assembly
• ‘Create Assembly’ dialog box will appear
• Change the Parameters as shown and press OK
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 100
• ‘Specify Assembly baseline location’ will prompt in the command line
• Give a location near the Profile View Diagram
• Assembly will be drawn.
A Snapshot of the Assembly
• Main Menu→General→Tool Palette Window
• Tool Palette Window will appear
• Rehab Tab→ OverlayMillAndLevel2
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 101
• ‘Select marker point within assembly’ will prompt in the command line
• Select the blue circle in the Assembly
• Sub Assembly will be drawn
• [RC] on the Sub Assembly→ Sub Assembly properties
• Sub Assembly Properties dialog box will appear
• Shift to ‘Parameters’ tab and change the parameters as required
• Press Apply and OK
• Sub Assembly will change according to the given parameters.
A typical set of parameters are inserted in the following figure
There is a sub assembly help tab in the bottom right of the Subassembly properties dialog
box. Clicking that button will demonstrate the parameters of this dialog box.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 102
A snapshot of the completed assembly
Overlay depth and the minimum clearance should be given according to the Pavement
Design.
12.3.3 Creating the Existing Tar Edges and Design Lane Edges Alignments
Once the Assembly is completed, it is necessary to run the Assembly along the Design
Centre Line. For this, the constraints should be specified. Civil 3D uses alignments to
specify these constraints.
• Copy the two TE lines drawn in the VA Surface and paste to the original coordinates
• Alignments→ Create Alignment by Polyline
• ‘Select the first line/arc/polyline’ will prompt in the command line
• Select the LHS TE
• You may be prompted to change the direction. If you selected the TE LHS towards the beginning
side of the DCL alignment, there is no need to change the direction
• Enter (2 times)
• ‘Create Alignment from Objects’ dialog box will appear
• Change the Parameters as shown and Press OK
• LHS TE will become an Alignment,
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 103
LHS TE has become an Alignment without labels
• Do the same to TE RHS also. Name it as E-RHS
• Offset the DCL to LHS and RHS in a width similar to the lane width
• Make them alignments in the same manner, naming them D-LHS and D-RHS
All Alignments (E-LHS, E-RHS, D-LHS, D-RHS and DCL)
5.3.4 Creating the Recambering Corridor
Running the ‘Recamb’ Assembly along the Design Centre Line subjected to the provided
constraints will result in a solid corridor.
• Main Menu→Corridors→Create Corridor
• ‘Create Corridor’ dialog box will appear
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 104
• Fill the parameters as shown and press OK
• ‘Baseline & Region Parameters’ dialog box will appear
• Click the frequency button
• ‘Frequency to apply assemblies’ dialog box will appear
• Change the parameters appropriately and press OK
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 105
• Click the ‘Target’ Button
• ‘Target Mapping’ dialog box will appear
• To change width or offset targets, click a <none> parameter under Object Name
• ‘Set Width or Offset Targets’ dialog box will appear
• Change the ‘Select object type to target:’ to Alignments
• Now Alignments will be displayed
• You can add the relevant alignment to match with the requirement using ‘Add’ button and
pressing OK.
• Fill the parameters as shown in the ‘Target Mapping’ dialog box
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 106
• Press OK
• Recambering corridor will be drawn
A Snapshot of the Recambering Corrior
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 107
12.3.5 Creating the Recambering Surface
Now the recambering corridor is created. It is necessary to create the topmost surface of
the Recambering Corridor.
• Toolspace→Corridors→[RC] Recamb→Properties
• Corridor Properties dialog box will appear
• In the Surfaces Tab, press ‘Create a Corridor Surface’
• While Data type = Links and Specify code = Top, press ‘Add surface item’
• Press Apply and OK
Now you will see the top surface of the Corridor is added under the Surfaces in the
Toolspace
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 108
5.3.6 Adding the Recambering Surface to the Profile View
Now it is necessary to add the created Recambering Surface to the Profile View.
• Profiles → Create Profiles from Surface
• Select Recambering Surface in the list of surfaces into the right and press ‘Add’
• It will be added to the Profile list down
• Press OK
• Now the recambering surface will be drawn in the Profile View.
12.4 Design of Vertical Alignment
An initial vertical alignment can be drawn as follows. In this step, the Designer does not
pay attention to the layer thickness or K values. But it will be convenient later, if proper
distancing of PVI (Point of Vertical Intersection) is maintained at the first instance.
12.4.1 Drawing Initial Profile View
• Main Menu→Profiles→ Create Profile by Layout
• ‘Select profile view to create profile’ will prompt in the command line.
• Select the Profile View
• ‘Create Profile – Draw New’ dialog box will appear
• Fill the parameters appropriately and press OK
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 109
• Now the Profile Layout Tools tool bar will appear.
• Use ‘Draw Tangents’ tool bit to draw the Profile
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 110
It is necessary to make sure that these lines are drawn above the recambering surface and
also to match as much as possible to the same. The distancing between two PVI’s is such
that it is greater than the permissible minimum Vertical Curve Length (VCL) of the
selected Design Speed.
Any adjustment can be done later, but a robust design at the first instance will make it
easy to fine tune in the next step.
12.4.2 Adding Vertical Curves to the Profile
Now the curves need to be added considering the permissible VCL and K values of the
selected Design Speed
• Use the ‘Free Vertical Parabola (PVI based)’ tool bit to add curves
• ‘Pick Point near PVI or Curve to add curve’ will prompt in the command line
• Select the first PVI
• ‘Specify Curve Length’ will prompt in the command line
• Give the Vertical Curve Length and Enter
• The Vertical Curve will be drawn
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 111
• Complete the design using curves and PVI’s where permissible as per the Design Speed.
12.4.3 Correcting the Profile View Labels and fine tuning
It will be noted that the Profile View Labels will not automatically change even after the
applying of Design Profile. This needs to be manually changed.
• Select the Profile View → [RC] Profile View Properties
• ‘Profile View Properties’ dialog box will appear.
• Go to the ‘Bands’ tab and change the Profile View as follows;
• Then the labels in the Profile View will change to represent the values of the FG profile
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 112
A Snapshot of a completed profile view diagram
Now the FG profile should be matched with the Recambering surface as much as possible
ensuring the VCL and K values satisfy the selected design speed. A routine practice for
this task is to insert another band showing the difference between the FG profile and the
recambering surface.
A Snapshot of a profile view diagram showing the difference between FG and
Recambering
Listen to a Lecture!
https://youtu.be/7ad7MILoWlk?feature=shared
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 113
CHAPTER 13: HARMONIZATION OF DESIGNS
13.1 General
The geometric form of a road is a three-dimensional alignment which is presented in two
projections, the horizontal and the vertical alignment. The horizontal and vertical
alignments have to be combined in such a way that a safe and aesthetically pleasing
design results. A road alignment is judged by its appearance in three dimensions, and a
good three-dimensional design will increase utility and safety and encourage a uniform
speed and improve appearance. The alignment of a road should be consistent throughout
the length of any uniform section of the road. Abrupt changes in a road can produce a
dangerous road. Good optical guidance is important for safety and traffic operation.
13.2 Coordination of Horizontal and Vertical Alignments for Safety
• The design speed of the road in both the horizontal and vertical directions
should be of the same order.
• Sharp horizontal curves should not be introduced at or near the top of a
vertical curve as a driver may not identify the change in the alignment,
especially at night. This situation is avoided if the horizontal curve leads the
vertical curve.
• Reverse horizontal curve with crest vertical curves are undesirable if
horizontal curves are short, since it is difficult for a driver to identify the
reverse curvature of the alignment by the crest.
• It is undesirable to provide a crest of a vertical curve near or at a road
intersection or rail crossing.
• Short humps in the grade should be avoided.
• Adequate visibility should be provided when transitioning from undivided to
divided roads.
• The horizontal and vertical alignment should not be designed independently.
Hazards can be concealed by inappropriate combinations of horizontal and
vertical curves, and therefore such combinations can be very dangerous
13.3 Coordination of Horizontal and Vertical Alignments for Aesthetic
Consideration
• It is desirable that the horizontal curve is longer than the vertical curve and that
the start of the horizontal curve should ideally lead the start of the vertical curve.
• A sag vertical curve should be located on the horizontal curve rather than on the
tangent close to the start of the horizontal curve.
• A short vertical curve on a long horizontal curve looks unpleasant.
• Rolling grades on isolated straights between curves look unpleasant.
• A short tangent in the grade line between sag curves has a poor appearance.
• A broken back crest or sag curves has a poor appearance.
• A short sag curve on a straight is unsightly, although functionally adequate,
whereas a long sag curve provides continuity and is aesthetically pleasing.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 114
13.4 Graphical Illustrations of Good and Poor Combinations
Figure 12.1 shows an example of a good combination of horizontal and vertical
alignments. Smooth flowing appearance results when vertical and horizontal curves
coincide.
Figure 12.1: An Example of a good Combination of HA and VA
Figure 13.2 shows an example of a poor geometric design.
Figure 13.2: An Example of a poor Combination of HA and VA
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 115
CHAPTER 14 DRAWING SHEET GENERATION
14.1 Introduction
Drawing sheets should be generated showing the Plan and Profile to issue to the
Construction site. While the preparation of the drawing sheets is usually done in the
draughtsman’s section, initial sheet preparation can be done using Civil 3D Software.
In order to do the drawing sheet preparation, a template should be prepared at first. Such a
template usually includes two view ports, exclusively for the Plan and Profile generation.
The balance of the sheet includes the Road name and other details.
A typical template showing Plan and Profile View Ports
14.2 Creating View Frames
View Frames are created to show the section of road each sheet includes.
• Main Menu→General→Plan Production Tools →Create View Frames
• ‘Create View Frames-Alignment’ dialog box will appear
• Specify the Station range and press Next
• ‘Create View Frames-Sheets’ dialog box will appear
• Select the required template and press Next
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 116
• Press Next until the ‘Create View Frames-Profile Views’ dialog box appears
• Change the Profile View Style and Band Set Style to RDA defaults
• Press ‘Create View Frames’
• View frames will be created.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 117
A Snapshot of the created View Frames
14.3 Creating Sheets
Now the drawing sheets can be created.
• Main Menu → General→ Plan Production Tools → Create Sheets
• ‘Create Sheets - View Frame Group and Layouts’ dialog box will appear
• Select ‘All layouts in the current drawing’ and press Next
• ‘Create Sheets – Sheet Set’ dialog box will appear
• Press Next
• ‘Create Sheets – Profile Views’ dialog box will appear
• Select ‘Choose settings’ and press ‘Profile View Wizard’
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 118
• ‘Create Multiple Profile Views – Profile View Height’ dialog box will appear. Press Next
• ‘Create Multiple Profile Views – Profile Display Options’ dialog box will appear. Press Next
• ‘Create Multiple Profile Views – Data Band set’ dialog box will appear.
• Change the Profiles to match with the EG and FG
• Press Next
• ‘Create Multiple Profile Views –Profile Hatch Options’ dialog box will appear. Press Next
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 119
• ‘Create Multiple Profile Views –Multiple Plot Options’ dialog box will appear. Press Finish
• ‘Create Sheets – Profile Views’ dialog box will appear
• Press ‘Create Sheets’
• ‘Select Profile View Origin’ will prompt in the command line
• Give a convenient place in the drawing.
• Then the drawing sheets will be generated.
A Snapshot of a created Drawing Sheet
This may be further fine-tuned by the draughtsman’s section, converting the file into an
AutoCAD file as follows;
File→Export→Export to AutoCAD →[Required version]
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 120
CHAPTER 15 DESIGN CROSS SECTIONS
15.1 Introduction
Design cross sections are important to visualize the road in the computer, before it is
actually being constructed in the site. Further, it is usually used to assess the cut and fill
quantities and to do the required modifications.
Note that the assembly created here is for a road described as follows.
• Design lane width = 3.5m
• Existing lane width = 2.5m (Approximately)
• Hard shoulder = 1.0m
• Soft shoulder = 1.0m
• Earth drain = 0.6m
Existing Road
• Overlay depth = 0.050m
Widening Section
• Wearing course = 0.050m
• Base depth = 0.250m
• Subbase depth = 0.300m
15.2 Creating the Basic Assembly
• Corridors → Create Assembly
• <Create Assembly> dialog box will prompt
• Give the necessary parameters to the dialog box
o Name =Assembly1
o Assembly Style =Customized
o Code set style =Customized
• Then, <Specify Assembly Baseline Location> will be prompted.
• Give any point.
• Assembly will be created
• Set the scale to 1:50, 1:100 or 1:200 depending on your requirement. Because usually cross
sections are drawn in these scales.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 121
15.3 Creating the Assembly: Existing Road
• Get the Tool Palettes Window by General→ Tool Palettes Window.
• Get the Rehab Tool Palette from Tool Palettes Window.
• Click the OverlayMillAndLevel2.
• <Select marker point within the assembly> will prompt.
• Click within the blue circle of the assembly
• Then the subassembly for the exiting road will be drawn.
• Press Escape.
• Now it is necessary to change the parameters of this subassembly.
• [RC] on it→Subassembly Properties.
• <Subassembly Properties> dialog box will prompt.
• Switch to parameters tab.
• Change the parameters as follows
o Left Overlay Slope Options =Outside lane superelevation
o Right Overlay Slope Options =Outside lane superelevation
o Use Profile = Use Profile
o Crown Point Offset = 0.000m
o Default Left Overlay Slope = -2.5%
o Left Sample Point Offset = -3.500m
o Left Trim Point Offset = -2.500m
o Minimum Clearance = 0.000m
o Overlay Depth = 0.050m
o Default Right Overlay Slope = -2.5%
o Right Sample Point Offset = 3.500m
o Right Trim Point Offset = 2.500m
o Slope Tolerance = 0.00%
• Press Apply and OK.
• Now the existing carriageway part is drawn.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 122
15.4 Creating the Assembly: Widening Section
• Go to Tool Palettes→Lanes
• Click LaneOutsiderSuper
• <Select marker point within assembly> command will prompt.
• Press the outside edge of the ‘OverlayMillAndLevel 2’
• The widening section will be drawn.
• [RC] on it→Subassembly Properties
• <Subassembly Properties> dialog box will prompt.
• Add an ‘R’ at the end of the name since this is at the RHS of the road
• Change the parameters as follows.
o Crown Point on Inside = No
o Insertion Point = Crown
o Side = Right
o Base Depth = 0.250
o Default Slope = -2.5%
o Pave1 Depth = 0.050m
o Pave2 Depth = 0.000m
o Sub-base Depth = 0.300m
o Width = 1.000m
• Press Apply and then OK.
• Then the widening section of the RHS will be drawn.
• Click the widening section
• Select Mirror Subassemblies.
• <Select marker Point within Assemblies> command will prompt.
• Select the LHS edge of the existing road.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 123
• Then the LHS of the widening section will be drawn.
• Click on the LHS Widening section and add an ‘L’ to the name
15.5 Creating the Assembly: Shoulders
• Go to Tool Palettes→Shoulders
• Click ShoulderVerticalSubbase
• <Select Marker Point within Assembly> command will prompt.
• Select the RHS edge of the widening section
• Then the Shoulders will be drawn
• [RC] on it→Subassembly properties.
• Add an ‘R’ to the name.
• Switch to Parameters tab.
• Change the parameters as follows.
o Side = Right
o Use Superelevation Slope = Outside shoulder slope
o Base Depth = 0.250m
o Default Paved Slope = -2.5%
o Pave1 Depth = 0.050m
o Pave2 Depth = 0.000m
o Paved Width = 1.000m
o Subbase Depth = 0.300m
o Unpaved Link Treatment = 1.000
o Unpaved Max Breakover = 8%
o Unpaved Slope = -4.00%
o Unpaved Width = 1.000m
• Press Apply and then OK.
• Then the shoulders will be drawn as follows.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 124
• Mirror the shoulders to the LHS as you did to the widening section.
• Add an ‘L’ to the subassembly name.
• Then the completed section will be as follows.
15.6 Creating the Assembly: Drains
• Go to Tool Palettes→Trenches
• Click SideDitchUShape
• <Select Marker Point within assembly> command will prompt.
• Select the edge of the shoulders as follows.
• Then the drain will be drawn as follows.
• [RC] on the drain→Subassembly Properties
• Change the name adding an ‘R’ to the end.
• Switch to Parameters tab.
• Change the parameters as follows.
o Side = Right
o C = 0.001m
o Bottom Width = 0.600m
o Ditch Depth = 0.600m
o B1 = 0.001m
o G1 = 1.00:1
o F1 = 0.001m
o Inside Bench Grade = 4.00%
o Inside Bench Width = 0.001m
o E1 = 0.000m
o D = 0.600m
o A1 = 0.001m
o G2 = 1.00:1
o F2 = 0.001m
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 125
o Outside Bench Grade = 4.00%
o Outside Bench Width = 0.001m
o E2 = 0.001m
o B2 = 0.001m
o A2 = 0.001m
• Press Apply then OK.
• Then the drain will be drawn.
• Mirror the Drain to the LHS
• Rename it adding an ‘L’ to the end.
• Then the complete section will be as follows.
15.7 Creating the Assembly: DayLight
• Go to Tool Pallettes→Daylight.
• Click DaylightMultiIntercept.
• <Select Marker Point within Assembly> command will prompt.
• Select the outer edge of the drain
• Then the daylight will be drawn.
• [RC] on the daylight→Subassembly Properties.
• <Subassembly Properties> dialog box will prompt.
• Change the name adding an ‘R’ to the end.
• Switch to Parameters tab
• Here you have to give only the Cut Slope and Fill Slope recommended by RDA.
o Cut Slope = 0.25:1
o Fill Slope = 1.50:1
• Other default values may apply.
• Press Apply and then OK
• Then the completed Assembly will be as follows
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 126
15.8 Creating the Corridor
• Corridors→Create Corridor
• <Select a baseline alignment> command will prompt.
• Press Enter.
• <Select an alignment> dialog box will prompt.
• Select CL
• <Select Profile> command will prompt.
• Press Enter
• <Select Profile> dialog box will prompt.
• Select Finished Ground Profile (FG)
• Press OK
• <Select an assembly> command will prompt.
• Press Enter
• <Select an assembly> dialog box will prompt.
• Select the Assembly you created.
• Press OK
• <Create Corridor> dialog box will prompt.
• Set the Corridor name to Corridor-1 or whatever appropriate.
• You can set the Start Station and End Station as well
• The maximum length of a corridor that can be conveniently handled by Civil 3D depends mainly
upon the processor of your computer.
• As at this date, my recommendation is to limit the length to 1km.
• Press the Frequency button.
• Set the frequencies to 10m or whatever as your requirement.
• Press OK.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 127
• Press the Targets button.
• <Target Mapping> dialog box will prompt.
• Press the <Click here to set all> in surfaces.
• <Pick a Surface>dialog box will prompt.
• Select EG (existing ground) and press OK
• Press <none> in the Crown Target Alignment.
• <Set Width or Offset Target> dialog box will prompt.
• Select CL and Press Add>>
• Press OK
• Same way, map following targets as well.
• Press OK
• Then the corridor will be created.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 128
• Go to Toolspace→Corridor-1→Properties.
• Switch to Surfaces tab.
• While Data type = Links and Specify Code = Top, press the Create a corridor surface button
• Press Add surface item button.
• Switch to Boundaries tab
• [RC] Corridor→Add Automatically→Daylight_Cut
• Press OK.
15.9 Creating the Sample Lines
• Sections→Create Sample Lines
• <Select an Alignment> command will prompt.
• Press Enter
• Select CL (Centre line).
• Press OK.
• <Create Sample Line Group> dialog box will prompt.
• Change the parameters as follows.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 129
• Press OK.
• <Sample Line Tools> dialog box will prompt.
• Select By Range of Stations
• <Create Sample Lines> dialog box will prompt.
• Change parameters as per your requirement.
• Press OK.
• <Specify station along alignment> command will prompt.
• Press Enter.
• Then the Sample lines will be drawn.
15.10 Creating the Cross Sections
• Sections→Create Multiple Section Views
• <General> dialog box will prompt.
• Change the parameters as per your requirement.
• Press Next.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 130
• <Offset range> dialog box will prompt.
• Press Next.
• <Elevation range> dialog box will prompt.
• Press Next.
• <Section Display Options> dialog box will prompt.
• Press Next.
• <Data Bands> dialog box will prompt.
• Change the necessary parameters.
• Press ‘Create Section Views’
• <Identify Section View Origin> command will prompt.
• Give a convenient location in the drawing.
• Then the cross sections will be created.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 131
CHAPTER 16 MATERIAL CALCULATIONS
16.1 Introduction
Material calculation can be performed profoundly in Civil 3D without much hassle. To
begin with, you have to open a cross section file where the cross sections are made to
around 1km.
16.2 Earth Work Calculations
• Open the Cross Section file and Save it as Mat-0+000-1+000.
• Go to Toolspace→Prospector→Corridors→[Corridor Name]→[RC]→Properties
• In the oncoming dialog box, go to Surfaces tab
• Remove the existing corridor surface.
• Press Create a Corridor Surface
• Change the Specify code: to Datum and press Add surface item button.
• Give the Overhang Correction = Bottom Links
• Press Apply and OK
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 132
• Go to Toolspace→Prospector→[Site No.]→[Your CL Alignment]→Sample Line
Groups→[Sample Line Name]→[RC]→Properties
• Go to Section Tab→Sample More Sources
• Select the Corridor Surface to the left and press Add>>
• Press Apply and OK.
• Go to Sections→Compute Materials
• Following dialog box will prompt.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 133
• Press OK.
• In the oncoming dialog box, change the Quantity takeoff criteria to EarthWorks and give the
parameters as shown.
o Existing Ground = EG Surface
o Datum = New Corridor Surface
• Press OK
• Then go to Sections→Generate Volume Report
• Following table will prompt.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 134
• Press the button against the Select a style sheet and select Earthwork from the oncoming dialog
box.
• Press OK and then the cut and fill materials sheet will be generated.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 135
16.3 Road Material Calculations
In the Section 16.2, it was the cutting and filling quantities that were calculated. However,
the quantities relevant to;
• Wearing Course
• Binder Course
• Base Course
• Sub base course
-are still to be calculated.
• Sections→Compute Materials
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 136
• Following dialog box will prompt.
• Press OK
• Following dialog box will prompt.
• Press Import another criteria.
• Following dialog box will prompt.
• Change it to Material List and press OK
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 137
• Following dialog box will prompt.
• Change the parameters suitably.
• Press OK.
• Press Apply and OK.
Relevant quantities will be mapped.
It is always possible to get a new Material List and map the other materials to compute
the quantities. Since the procedure is similar, it would not be described here in detail.
• Then go to Sections→Generate Volume Report
• Following dialog box will prompt.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 138
• Select the relevant material list and press the button against the Select a style sheet.
• Select ‘Select Material’ style sheet from the oncoming dialog box.
• Press OK.
• Then the Volume Report will be generated.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 139
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 140
CHAPTER 17: INTRODUCTION TO INTERSECTION DESIGN
17.1 At Grade Intersections
An at-grade intersection may be defined as a location at which two or more roads
intersect at grade. The capacity at an intersection is deemed to reduce due to the sharing
of right-of-way by conflicting traffic movements.
Following flow chart explains the situation of an intersection over the time.
Common right-of-way
Conflicts
Reduced capacity
Delays and accidents
Control
17.2 Types of Intersection
Following are the common types of intersections.
• Right angle intersection
• Skewed intersection
• T-type intersection
• Y-type intersection
• Multi leg intersection
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 141
17.2.1 Right Angle Intersection
When two roads intersect each other at 900 or are perpendicular to each other at
intersection, it is called a Right angle intersection.
Figure 17.1: A Graphical Illustration of a Right Angle Intersection
17.2.2 Skewed Intersection
When two roads intersect each other at any angle other than 900, a skewed intersection
forms.
Figure 17.2: A Graphical Illustration of a Skewed Intersection
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 142
17.2.3 T-Type Intersection
T Type intersections occur when one road meets the other at right angles or close to a
right angle.
Figure 17.3: A Graphical Illustration of a T-Type Intersection
17.2.4 Y-Type Intersection
A Y Junction forms when 03 legs of equal size meet at an acute or obtuse angle to each
other.
Figure 17.4: A Graphical Illustration of a Y-Type Intersection
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 143
17.2.5 Multi Leg Intersection
Multi Leg Intersections are the intersections with more than 04 legs.
Figure 17.5: A Graphical Illustration of a Multi Leg Intersection
17.3 Typical Intersection Configurations
Most intersections have three or four legs, but multi-leg intersections (five and even six-
leg intersections) are not unusual. Examples of intersection configurations frequently
encountered by the designer are shown in following figure. Ideally, streets in three-leg
and four-leg intersections cross at right angles or nearly so. However, skewed approaches
are a regular feature of intersection design. When skew angles are less than 60 degrees,
the designer should evaluate intersection modifications to reduce the skew.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 144
Figure 17.6: A Graphical Illustration of Typical Intersection Configurations
17.3 Types of Conflicts
There may be 04 types of conflicts in any given intersection. They are as follows;
• Cross Conflict
• Merge Conflict
• Diverge Conflict
• Weaving Conflict
Cross conflict is the major type of conflict while the merge, diverge and weaving are
considered as minor conflicts. They are described in detail in flowing section;
17.3.1 Cross Conflict
Cross conflict happens when two vehicle paths collide with each other perpendicularly.
This type of conflict may lead to severe accident hence it is considered a major conflict in
intersection design.
Figure 17.6: A Graphical Illustration of a Cross Conflict
17.3.2 Merge Conflict
Merge conflict occurs when a vehicle from another lane or another route converges into a
lane of another vehicle. This does not lead to a severe accident and therefore it is
considered a minor conflict.
Figure 17.7: A Graphical Illustration of a Merge Conflict
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 145
17.3.3 Diverge Conflict
Diverge conflict occurs when a vehicle moves away from its lane to join another lane or
to take another route. As the vehicle switches lanes, it might slow down causing problems
to the vehicle immediately behind it. This leads to diverging conflict, but it is considered
a minor conflict as it doesn't cause a severe accident.
Figure 17.8: A Graphical Illustration of a Diverge Conflict
17.3.4 Weaving Conflict
This is a combination of merge and diverge conflict. It usually happens in rotary ways or
to switch from the wrong lane to the correct lane.
Figure 17.7: A Graphical Illustration of a Weaving Conflict
17.4 Conflict Points
Conflict Points are the points where two vehicles may potentially collide with each other
at a road intersection. The number of conflict points for a particular intersection type is
unique and they can be calculated.
17.4.1 Conflict Points in a 4 Leg Intersection
Figure 17.8: A Graphical Illustration of Conflict Points in a 4 Leg Intersection
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 146
17.4.2 Conflict Points in a 3 Leg Intersection
Figure 17.8: A Graphical Illustration of Conflict Points in a 3 Leg Intersection
17.4.3 Conflict Points in a Roundabout
Figure 17.9: A Graphical Illustration of Conflict Points in a Roundabout
17.5 Main Methods of Intersection Control
Following are the main methods of intersection control available.
• Unchannelized unflared (simple) intersections
• Flared intersections
• Chanellized intersections
• Roundabouts
• Signalized intersections
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 147
17.5.1 Unchannelized Unflared (Simple) Intersections
Unchannelized unflared (simple) intersections maintain the street’s typical cross-section
and number of lanes throughout the intersection, on both the major and minor streets.
They are best-suited to locations where auxiliary (turning) lanes are not needed to achieve
the desired level-of-service, or are infeasible due to nearby constraints. Generally,
unchannelized unflared (simple) intersections provide the minimum crossing distances for
pedestrians and are common in low-volume locations.
These intersections normally include “T’, “Y”, “Four Leg”, or “Multi Leg” intersections
depending on their shape and number of legs which make up the intersection. Many
intersections remain unchanelized in urban areas owing to economic reasons.
Figure 17.10: A Graphical Illustration of an Unchannelized Unflared (Simple)
Intersection
17.5.2 Flared Intersections
Flared intersections expand the cross-section of the street (main, cross or both). The
flaring is often done to accommodate a right-turn lane, so that right turning motor
vehicles are removed from the through-traffic stream to increase capacity at high-volume
locations, and safety on higher speed streets. Left-turn lanes, less frequently used than
right-turn lanes, are usually a response to large volumes of left turns.
Intersections may be flared to accommodate an additional through lane as well. This
approach is effective in increasing capacity at isolated rural or suburban settings in which
lengthy widening beyond the intersection is not needed to achieve the desired level-of-
service; not feasible due to nearby constraints; or, not desirable within the context of the
project.
Intersection approaches can be flared slightly, not enough for additional approach lanes
but simply to ease the vehicle turning movement approaching or departing the
intersection. This type of flaring has benefits to bicycle and motor vehicular flow since
higher speed turning movements at the intersection are possible and encroachment by
larger turning vehicles into other vehicle paths is reduced. However, adding flare to an
intersection increases the pedestrian crossing distance and time.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 148
Figure 17.11: A Graphical Illustration of a Flared Intersection
17.5.3 Channelized Intersections
Channelized intersections use pavement markings or raised islands to designate the
intended vehicle paths. The most frequent use is for left turns, particularly when
accompanied by an auxiliary left-turn lane. At skewed intersections, channelization
islands are often used to delineate left turns, even in the absence of auxiliary left turn
lanes. At intersections located on a curve, divisional islands can help direct drivers to and
through the intersection. At large intersections, short median islands can be used
effectively for pedestrian refuge.
Channelization islands are also used in support of right turn lanes, forming the ends of the
taper approaching the turn bay, and often the narrow divisional island extending to the
intersection. At “T”-type intersections, a channelization island can guide oncoming traffic
to the left of the right-turn lane. Channelized intersections are usually large and, therefore,
require long pedestrian crosswalks. However, the channelization islands can effectively
reduce the crosswalk distance in which pedestrians are exposed to moving motor
vehicles.
Figure 17.11: A Graphical Illustration of a Channelized Intersection
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 149
17.5.4 Roundabouts
The roundabout is a channelized intersection with one-way traffic flow circulating around
a central island. All traffic—through as well as turning—enters this one-way flow.
Although usually circular in shape, the central island of a roundabout can be oval or
irregularly shaped. Roundabouts can be appropriate design alternative to both stop
controlled and signal-controlled intersections, as they have fewer conflict points than
traditional intersections (eight versus 32, respectively). At intersections of two-lane
streets, roundabouts can usually function with a single circulating lane, making it possible
to fit them into most settings.
Roundabouts are also considered as traffic-calming devices in some locations since all
traffic is slowed to the design speed of the one-way circulating roadway. This is in
contrast with application of two way stop control, where the major street is not slowed by
the intersection, or all-way stop control where all traffic is required to stop.
Few significant considerations in selecting a roundabout are as follows.
• Roundabouts are more suitable than a traffic signal control if the right turning
traffic exceeds about 30% of all approaching traffic. It provides easy facility for
right turn traffic.
• Roundabouts are not suitable where the angle of intersection of two roads is very
acute, where the distance between the intersections tends to be small or where the
pedestrian traffic is large.
• It is suitable when traffic is less and speeds are not very high.
• Roundabouts reduce conflicts and ensure one way movement of traffic. The
vehicle operating cost is lesser than that of a signalized intersection as there is no
waiting. Maintenance cost is negligible.
• A roundabout requires a large area. Segregation of slow moving traffic cannot be
made. It makes no provision for pedestrian traffic.
• It is not suitable when more than five roads intersect.
Figure 17.12: A Graphical Illustration of a Roundabout
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 150
17.5.5 Signalized Intersections
Traffic signals are devices which, by means of changing coloured lights, regulate the
movement of traffic. By providing alternate right of way traffic signals exert a profound
influence on traffic flow and can operate to the advantage or disadvantage of the vehicles
or pedestrians they control, depending on the quality of the design.
Advantages of Signalized Intersections
• Traffic signals are valuable devices for the control of vehicle and pedestrian
traffic. Warranted traffic signals properly located and operated, usually have one
or more of the following advantages:
• They can provide for the orderly movement of traffic.
• Where proper physical layouts and control measures are used, they can increase
the traffic-handling capacity of the intersection.
• They can reduce the frequency of certain types of accidents, especially right-angle
type.
• Under favourable conditions, they can be coordinated to provide for continuous or
nearly continuous movement of traffic at a definite speed along a given route.
• They can be used to interrupt heavy traffic to permit other traffic, vehicular or
pedestrian, to cross.
• They can be used to increase driver confidence and to reduce driver stress level by
assuring right of way.
Disadvantages of Signalized Intersections
The following factors can result from an improper or unwarranted signal installation.
Excessive delay may be caused in case signals are installed improperly. This can be
significant in off peak hours.
• Even the best designed and operated signals usually increase delay when
compared to unsignalized intersections. However, unnecessary delay is a common
feature of an unwarranted or an improperly designed traffic signal.
• Disobedience of the signal indications is encouraged at unwarranted
signalizations. Delay at unwarranted or poorly designed traffic signals can breed
gross disrespect toward signals a well as other traffic control devices
• The use of less adequate routes may be encouraged in an attempt to avoid delays
at such signals.
• Accident frequency can be significantly increased at unwarranted signals or at
locations where installation was not based on sound engineering analysis.
• Wide spread confusions and difficulties can happen in case of signal break down.
Figure 17.12: A Photographic Illustration of a Traffic Signal System
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 151
CHAPTER 18: THEORY OF ROUNDABOUTS
18.1 Introduction
Sri Lankan Roundabouts are designed based on the AUSTROADS Part 6: Guide to
Traffic Engineering Practice – Roundabouts, 1993 and its later revisions. Reader is
strongly advised to refer this manual and its revisions to do a design of roundabout for a
practical situation. The scope of this book is to introduce and demonstrate the theory of
roundabout as used in Sri Lankan practice.
18.2 Types of Roundabouts
Depending on the size of the central island and the arrangement of vehicle movements,
roundabouts are categorized as follows.
18.2.1 Mini Roundabouts
Mini roundabouts have central island diameter less than 4.0 m and single lane circulating
carriageway. Adequate deflection is not achieved and drivers face difficulty in deciding
appropriate gaps in the traffic flow. This type of roundabouts is constructed at low traffic
intersections. Also a provision has been made to pass over the central island for heavy
vehicles by keeping the central island 50 mm above the road surface.
Figure 18.1: A Photo of a Mini Roundabout
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 152
18.2.2 Small Roundabouts
When central island diameter is less than 10.0 m, the roundabout is considered as small.
These may have a circulating carriageway of single or two lanes. Small roundabouts are
appropriate for three or four legs intersections with moderate traffic movements. Most of
the roundabouts in Sri Lanka fall into this category.
Figure 18.2: A Photo of a Small Roundabout
18.2.3 Double Roundabouts
A double roundabout is a combination of two small roundabouts link together. These lead
to be the best solution for multi-leg intersections, though elliptical islands are also made
use of. In negotiating elliptical curves, drivers have to change speed-causing
inconvenience. Therefore two circular islands are preferred because of drivers can drive
through at uniform speed.
Figure 18.3: A Photo of a Double Roundabout
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 153
18.2.4 Conventional Roundabouts
This type of roundabouts having a one-way carriageway, which may be composed of
varying sections, around a circular or asymmetrical central island and normally without
flared approaches.
Figure 18.4: A Photo of a Double Roundabout
18.3 Elements of a Roundabout
The elements of a roundabout are shown in the Figure 18.5 and 18.6. A brief descriptions
of each element are given below.
Figure 18.5: Elements of a Roundabout
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 154
Figure 18.6: Geometric Elements of a Roundabout
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 155
18.3.01 Central Island
Central Island should preferably be circular as continually changing curvature of the
circulating carriageway increases the driving task demand. However, oblong or other
shapes may need to be adapted to suit unusual site conditions. The size of the central
island is determined principally by the space available and the need to obtain sufficient
deflection to control through vehicle speed.
18.3.02 Central Island Diameter
In general, a large central island provides greater separation between adjacent conflict
areas and makes it easier for entering drivers to determine whether vehicles, already on
the circulating carriageway, are exiting or continuing on around the circulating
carriageway. Larger diameter central islands are usually necessary for roundabouts in
high- speed areas at multi-leg intersections.
18.3.03 Inscribed Circle Diameter
The diameter of the circle that may be inscribed within the outer kerb line of the
circulating carriageway is denoted by inscribed diameter. This may not always be truly
circular.
18.3.04 Circulating Carriageway
The carriageway around the central island on which, circulating vehicles travel in a
clockwise direction.
18.3.05 Circulating Carriageway Width
The width of the circulating carriageway described above.
18.3.06 Circulating Carriageway Width
A broken line, marked across the entry carriageway, where it meets the circulating
carriageway and at which, vehicles should wait if necessary for an acceptable gap in
traffic to enter the circulating carriageway.
18.3.07 Entry Curve
The left edge of pavement curve of the entry carriageway, which leads vehicle into the
circulating carriageway, is known as entry curve.
18.3.08 Exit Curve
The left edge of pavement curve of the exit curve carriageway, which leads vehicle out of
the circulating carriageway, is known as exit curve.
18.3.09 Approach Width
The one-way width of the carriageway on the approach to the roundabout is known as the
approach width.
18.3.10 Entry/Exit Width
The width of the carriageway at its entry / exit point to / from the circulating carriageway
is known as entry / exit width.
18.3.11 Departure Width
The one-way width of the carriageway on the departure from the roundabout is known as
departure width.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 156
18.3.12 Corner Kerb Radius (Kerb Return)
The radius of the corner kerb between adjacent entry and exit roadways is known as
corner kerb radius.
18.3.13 Splitter Island
Splitter islands should be provided on all roundabouts in rural and urban areas. They
provided shelter for pedestrians, assist in controlling entry speed, guide traffic into the
roundabout and deter right turners from taking dangerous ‘wrong way’ short cut
movements through the roundabout.
Splitter islands should be designed to direct vehicles into roundabout on a smooth curve
and at angle, which affords the drivers comfortable sighting of approaching traffic. The
curve on the entry side of the splitter island, where it turns into the circulating
carriageway, should be tangential to the centre island. However, in some cases, the
projection of the entry curve may be permitted to cut slightly into the central island.
The splitter island should be of sufficient size to shelter a pedestrian (at least 2.4 m wide)
and be a reasonable target to be seen by approaching traffic. A minimum area of 8 to 10
m2 should be provided on any major road approach.
18.4 Gap Acceptance Theory
The usual term used to define Gap Acceptance Behaviour are the critical acceptance gap,
ta and the follow-up time, tf.
The Critical Acceptance gap is the minimum acceptable gap that will be acceptable to a
homogenous and consistent population of drivers.
The Follow-up time is the minimum headway between minor stream vehicles, which
enter in the longer gaps in the circulating traffic. In both cases, the units are in seconds.
In the theory, it is assumed that all drivers will accept a gap greater than Critical
Acceptance Gap. It is also assumed that drivers are consistent and behave exactly the
same each time a gap is offered.
As the drivers in each entry lanes behave differently, each entry lane will be given
different Critical Gap and Follow-up Headway parameters.
18.5 Capacity Analysis Procedure
The procedure for capacity analysis for each approach by this method is as follows.
Assemble Traffic Data.
1. Determine the number of entry and circulating lanes.
2. Record the geometric values for;
a. The inscribed diameter, Di
b. The number of entry lanes, ne
c. The number of circulating lanes, nc
d. The average entry lane width
3. Classify the entry lane type
4. Estimate the Critical Gap Acceptance parameter.
5. Estimate the characteristic of the circulating traffic.
6. Calculate Absorption Capacity and Degree of Saturation.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 157
18.6 Worked Example in AUSTROADS
Consider the following intersection. Turning movements are given in Veh/hr.
Source: AUSTROADS
18.6.01 Assemble Traffic Data
Cyclic and stochastic variations in traffic flows should be taken into account when
assembling the traffic data into the turning movements flows to be used in the analysis.
Where the truck flows are less than 5%, the total vehicle flow is considered to be
passenger car units (pcu’s). For truck volumes greater than 5% the truck flows should be
converted to passenger car units. A single unit trick is assumed to be equivalent to 2 pcu’s
and an articulated vehicle, 3 pcu’s. Equivalencies for other vehicle types such as bicycles
or large combination vehicles may be estimated and used if necessary.
Traffic data must be assembled into Entry Flows and Circulating Flows as follows.
Leg W Flow = (133+53)+42 = 228
Leg N Flow = (263+32)+53 = 348
Leg E Flow = (124+137)+32 = 293
Leg S Flow = (42+181)+137 = 360
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 158
Source: AUSTROADS
18.6.02 Determine the Number of Entry and Circulating Lanes
The number of entry lanes will generally be determined from the number of lanes on the
approach carriageway. However, an entry may be widened or flared, particularly if there
are heavy turning movements.
It is usually assumed that the number of circulating lanes will equal the number of entry
lanes at any approach. This assumption can be relaxed later if required.
FIGURE 3.3 (AUSTROADS) annexed is a plot of approach (entry) flows and circulating
flows and the acceptability of a single or multilane roundabout. The shaded bands
indicate the limits for a single lane roundabout and a two lane roundabout. For instance, if
conditions at a roundabout give a point in the upper shaded area of the FIGURE 3.3
(AUSTROADS), then a two lane roundabout may be acceptable depending on the entry
geometry and the acceptable degree of saturation. The user may need to evaluate both a
two lane and a three lane roundabout in this case. FIGURE 3.3 (AUSTROADS) is based
on the acceptable degree of saturation being less than 0.8.
The required numbers of entry and circulating lanes are obtained from FIGURE 3.3
(AUSTROADS),
For this example, all points given by plotting the circulating flow against the entry flow
are below the first grey area, thus a single lane roundabout will be suitable.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 159
18.6.03 Record the Geometric Values
From the functional plans of the roundabout or from actual measurement, record the
values for:
• The inscribed diameter Di
• The number of entry lanes , ne
o ne is 1 for entry widths less than 6m.
o ne is 2 for entry widths between 6m and 10m
o ne is 3 for entry widths greater than 10m.
• The number of circulating lanes nc
o nc =1 for circulating carriageway widths less than 10m.
o nc =2 for circulating carriageway widths greater than or equal to 10m and
less than 15m.
o nc =3 for circulating carriageway widths greater than 15m.
NOTE
For some circulating carriageway between 8m and 10m wide and with circulating flow
rates greater than 1000veh/hr, there may be two effective lanes so nc may be set to 2.
In the example, given the geometric layout of the roads and width of reservation available
at this location, an inscribed diameter of 32m would be suitable, and average entry lane
widths of 4m are proposed. It should be noted that only estimated measurements are
required at this stage and they may be adjusted later if necessary. These measurements
are shown in FIGURE B7 (AUSTROADS) annexed.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 160
18.6.04 Classify the Entry Lane Type
Classify the entry lanes as either dominant or sub-dominant. Where there are two or more
entry lanes, one entry lane ‘dominates’. That is the drivers in this lane tend to influence
the behavior of drivers in other entry lanes at the approach. The entry lane with the
greatest flow is chosen to be the dominant stream. Other entry lanes will then be sub-
dominant. If there are 3 entry lanes, two will be sub-dominant and only one will be a
dominant stream. If there is only one entry lane at an approach then this lane is
considered as a ‘dominant’ lane.
18.6.05 Estimate the Critical Gap Acceptance Parameters
Gap acceptance parameters are affected by the geometry of the entry. Geometrics which
offer an easier entry path give lower gap acceptance values. These parameters are also a
function of the circulating flow. At higher circulating flows, the circulating speeds are
lower and drivers are more willing to accept smaller gaps. Also at higher circulating
flows, more drivers slow and allow entering drivers to move in front of them. This leads
to priority haring or even a reversal of priority.
For a Single Lane Entry
Table 3.1 annexed lists the dominant stream follow-up headway (tfd). If there is one
circulating lane (nc=1), these values are used for the entry stream. If there are 2 or more
circulating lanes (nc=2 or 3), then the values given in Table 3.1 should be increased by
0.39.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 161
The ratio of the critical acceptance gap to the follow-up headway (tad/tfd) is given in Table
3.2 (AUSTROADS). The critical acceptance gap is the product of the appropriate values
from Table 3.1 (AUSTROADS) and Table 3.2 annexed (AUSTROADS).
For Multilane Approaches
To estimate the entry lane flows at approaches with two or more lanes, it can be assumed
that drivers wishing to turn right will use the right hand entry lanes and the drivers turning
left will use the left hand lanes. However, in some situations lanes may be marked with
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 162
signs or pavement arrows to restrict them to particular traffic movements and the lane
arrangement so marked would be used in the analysis. The through traffic then needs to
be proportioned to the appropriate lanes to finalize the lane entry flows. While the above
provides the most accurate assessment, it is pointed out that estimates of approach
capacity are not significantly affected by the distribution of traffic in the lanes.
The entry lane with the greatest flow at an approach is termed ‘dominant’ lane and the
traffic in this lane is termed the dominant stream. Other lanes contain subdominant
streams.
The critical gap parameters for an approach with two or more entry lanes are estimated
using Tables 3.1(AUSTROADS), 3.2(AUSTROADS), 3.3(AUSTROADS) and
3.4(AUSTROADS) annexed.
Table 3.1(AUSTROADS) gives values for the follow up headway for the dominant
stream. These values are adjusted if the number of entry lanes differs from the number of
circulating lanes. The adjustment values are given in Table 3.3(AUSTROADS).
Table 3.4(AUSTROADS) gives the values of the sub-dominant stream follow up
headway (tfs) as a function of the dominant stream follow up headway (tfd) and the ratio of
dominant stream entry flow to the sub dominant stream entry flow.
The critical gap acceptance values for each lane are given by the product of the follow-up
headway (From Tables 3.1(AUSTROADS) and 3.4(AUSTROADS)) and the ratios in
Table 3.2(AUSTROADS) as stated above, critical acceptance gap values need to be
calculated separately for each lane.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 163
In the example, as there is only one stream from the North, this entry stream will be used
as a ‘dominant’ one. The drivers in this stream will have a follow up time of 2.7s. This is
obtained from interpolating between the values in Table 3.1. The ratio of the critical
acceptance gap to the follow-up headway is then 1.85 giving a critical acceptance gap of
1.85 x 2.7 or 5.0 s.
18.6.06 Estimate the Characteristics of the Circulating Traffic
As the entering drivers give way to all circulating vehicles, the circulating traffic can be
considered as if it were all in one lane. There are, however, circulating stream
characteristics that change with flow and the number circulating lanes.
The greater the number of circulating carriageway lanes, the shorter will be the average
headway between bunched vehicles in all lanes. If there are two or more circulating lanes
then the average headway (t) between bunched vehicles is about 1s and if there is only
one lane the average headway is 2s.
If a circulating carriageway equal to or greater than 10m wide carries a circulating flow
greater than 1000veh/h it can be assumed to effectively operate as two streams and the
average headway between bunched vehicles (t) will be 1s. (See Table 3.5
(AUSTROADS))
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 164
Under these conditions, the vehicles might travel in an offset pattern as shown in Fig.
3.4(AUSTROADS) and users should decide whether or not the circulating carriageway
will be considered to have one or two effective lanes.
It may be preferred to consider all single lane roundabouts to have only one effective lane
regardless of the circulating flow and hence an average headway between bunched
vehicles of 2s. This action would be conservative. Note that if it is considered that there
will be two effective circulating streams, then the number of circulating lanes (nc) should
be set to 2. Table 3.3(AUSTROADS) may then need to consulted when estimating the
follow up headways.
The operation of the circulating traffic stream also affects the average percentage of
vehicles which are in bunches. As the flow increases, more vehicles are in bunches.
The proportion of bunched vehicles (Θ) is evaluated from the circulating flow, the
number of effective circulating lanes (characterized by the average headway between
bunched vehicles) and the proximity of the roundabout to signalized intersections or other
situations which increase bunching. Troutbeck (1989) gives equations for estimating the
proportion of free vehicles, i.e. those not in bunches. Values for the proportion bunched
vehicles have been developed from these equations and the revised values are listed in
Table 3.6(AUSTROADS)
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 165
It is suggested that the values given in this Table be then adjusted according to the
proximity of the roundabout to nearby signalized intersections other situations which will
influence the approaching traffic conditions and the circulating flow at the roundabout.
Values should be increased or decreased by no more than 0.2 based on judgment of the
extent of the bunching caused.
The proportion of bunched vehicles is expected to range from 0 for random traffic to
about 0.8 for heavily platooned traffic. Values as high as 0.8 to 0.9 have been observed in
extreme cases. This is equivalent to an average platoon length of 1 to about 3 or 4
vehicles in most conditions and up to 10 vehicles under the worst condition.
18.6.07 Calculate Absorption Capacity and Degree of Saturation
The absorption capacity of each entry lane is calculated from the entry lanr gap
acceptance parameters (ta and tf) applicable to the dominant lane and to each sub-
dominant entry lane and the circulating flow characteristics (Qc, t, Θ) .
The appropriate equation is:
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 166
In the example, the circulating carriageway width is less than 10m and it is considered to
operate as a single lane roundabout. The average headway between the bunched vehicles
will then be 2s with about 40 percent of vehicles in bunches (or following others). These
values are given in Table 3.6.
Using these values then;
Θ = 0.40
Qc = 348 veh/hr
qc = 0.0967 veh/s
ta = 5.0 s
tf = 2.7 s
t =2s
-gives a value of λ equal to 0.0719 (from Eq. 3.2) and the absorption capacity C, given
by equation 3.1 is 954 veh/hr. The degree of saturation is the entry flow divided by the
capacity or 385/954 or 0.4.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 167
CHAPTER 19 ROUNDABOUT DESIGN
19.01 Introduction
The Designer is supposed to read Austroads Guide to Road Design Part 6: Roundabouts
for the geometric design of the roundabout. In geometric design, SIDRA is basically used
to analyze the intersection to assist the designer to arrive at the optimum geometric design
of the roundabout.
19.02 Traffic Data
Traffic data of the intersection for the peak hour has to be taken from the traffic counting
agency. A traffic count carried out for a 3 leg intersection is shown below. Heavy vehicle
count of each movement is shown inside the bracket.
19.03 Creating a Project in SIDRA Intersection
• Start SIDRA as any other Windows based programme
• File→Save As→[Select the Folder]→[Project Name]→Save
19.04 Intersection Treatment
• Go to Site Tab
• Select Roundabout
19.05 Roundabout Type
• Go to Site Roundabout
• Select “Roundabout (Unsignalised) 2-lane”
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 168
19.06 Site Input: Intersection
Refer the Section 09.06 and do the necessary adjustments
19.07 Site Input: Movement Definitions
Refer the Section 09.07 and do the necessary adjustments
19.08 Site Input: Lane Geometry
Lane configurations, Lane disciplines and Lane geometry have to be given under this
Input.
• 19.08.1 Lane Configurations
Lane configuration of each leg has to be given in this tab. Lane configuration tab, without
changes is shown in the following figure;
Any adjustments, depending on the design criterion can be done here/
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 169
• 19.08.2 Lane Disciplines
Adjustments to the Lane Disciplines can be done here in this tab.
• 19.08.3 Lane Data
Adjustments to the Lane Data can be done here in this tab.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 170
19.09 Site Input: Lane Movements
Refer the Section 09.07 and do the necessary adjustments
19.10 Site Input: Roundabouts
• 19.10.1 Roundabout Options
Roundabout options can be selected in this tab.
• 19.10.1 Roundabout Data
Roundabout Data has to be corrected as per the design criterion. A worked out example is
shown below;
• Process Site→OK
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 171
The layout diagram can be visualized by pressing View Display;
10.11 Site Input: Pedestrian Movement Data
Refer the Section 09.10 and do the necessary adjustments
19.12 Site Input: Volumes
Traffic Data need to be inserted to this dialog box. A worked out example for the West
Leg is shown below
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 172
19.13 Site Input: Gap Acceptance Data
Gap acceptance data can be changed as per the design criterion in this tab
19.14 Site Input: Vehicle Movement Data
Vehicle Movement Data can be changed in this tab.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 173
19.15 Site Input: Vehicle Movement Data
Refer 9.14 to change Vehicle Movement Data
19.16 Site Input: Site Demand & Sensitivity
Site demand and sensitivity can be changed here in this tab;
19.17 Site Input: Parameter Settings
Parameter Settings can be changed here in this tab;
19.18 Site Output
All the Site output records can be visualized as in Chapter 10 by pressing on each tab
after processing the Site.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 174
CHAPTER 20: THEORY OF TRAFFIC SIGNALS
20.1 Introduction
Sri Lankan traffic signals are designed based on the Akcelik R (1981), Traffic Signals:
Capacity and Timing Analysis, Research Report ARR No. 123, Australian Road Research
Board, Vermont South, Australia, (7th reprint 1998). This report is simply referred as
ARR123 in Sri Lankan highway design industry. Reader is strongly advised to refer this
manual and its revisions to do a traffic signal design a practical situation. The scope of
this book is to introduce and demonstrate the theory of traffic signal design as used in Sri
Lankan practice.
20.2 Types of Traffic Signals
There are three types of traffic signal operations - Fixed Time Signals, Semi-Actuated
Signals and Actuated Traffic Signals.
20.2.1 Fixed Time Signals
Fixed time signal is a traffic control signal by which traffic is alternatively commanded to
stop and permitted to proceed in accordance with a predetermined time schedule. They
are normally installed at an intersection of two major roadways with similar traffic
volumes. Fixed time signals consistently cycle on a sequential predetermined timing. The
predetermined timing is based on the amount of time a pedestrian takes to cross the
intersection as well as peak vehicular volumes. Fixed time signals do not depend on any
type of detection from the side-street such as detection loops or by pedestrian push-
buttons.
This type of signal is used where traffic patterns and volumes are predictable and do not
vary significantly.
20.2.2 Semi Actuated Signals
Semi-actuated signals are normally installed at an intersection with a major and minor
roadway. This type of signal operates based on vehicular or pedestrian demands on the
side-streets. The major roadway remains green until a vehicle enters the detection loop,
which is located under the pavement, or a pedestrian presses the push-button on the minor
roadway. The traffic signal changes from green to red on the major roadway once a
vehicle or pedestrian is detected on the minor roadway and allows the minor roadway to
proceed.
There are two different timings within a semi-actuated signal. The amount of time for
vehicles only to clear the intersection and the amount of time that it takes a pedestrian to
cross the major roadway. The vehicle timing is based on the busiest hour (peak hour) and
the side of the minor roadway, which has the most vehicular volume (critical
movements). The pedestrian crossing time is based on a normal walking speed of 1.25
meters per second and the distance the pedestrian must cross.
Typical locations for semi actuated control include;
• Major routes intersected by roadways of lower functional classification.
• School crossing intersections.
• On access routes to indudtrial areas or shopping centres.
• On access routes to recreational areas or sport centres.
• On access routes with poorly spaced signals along the major route
• On cross streets with minimal traffic volumes.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 175
20.2.3 Fully Actuated Signals
Full actuated control employs detection devices on all approaches to the signalized
intersection. The green interval for each street or phase is determined on the basis of
volume demand. Continuous traffic on one street is not interrupted by an actuation
demand from the side street until a gap in the traffic appears or when the preset minimum
maximum green time has elapsed. Once the minor street demand has been satisfied, right
of way is typically returned to the major street whether or not a major street detection has
been registered. Where there is a continuous demand on all approaches, the intersection
tends to operate as a pretimed system. Full actuated control is an appropriate design
choice at isolated locations where volume on intersection legs are more equal with
sporadic and varying traffic distribution.
20.3 Warrants for Traffic Signals
In engineering practice, the need for signalizing an intersection is considered only when
the traffic and safety features at such a place warrants such an improvement. A number of
warrants have been developed for this purpose as follows.
Warrant 1: Minimum Vehicular Traffic
Warrant 2: Interruption of Continuous Traffic
Warrant 3: Minimum Pedestrian Volume
Warrant 4: School Crossings
Warrant 5: Progressive Movement
Warrant 6: Accident Experience
Warrant 7: Systems
Warrant 8: Combinations of Warrants
20.3.1 Warrant 1: Minimum Vehicular Traffic
This warrant is satisfied when, for each of any eight hours of an average day, the traffic
volumes on the major street and on the higher volume minor street approach to the
intersection, reaches specified values.
Table 20.1: Minimum Vehicular Volume Warrants
Number of lanes for Vehicles per hour on Vehicles per hour on higher
moving traffic on each major street (Total of both volume minor street approach.
approach approaches) (One direction only)
Major Minor
Street Street
1 1 500 150
2 or more 1 600 150
2 or more 2 or more 600 200
1 2 or more 500 200
Source: Manual on Uniform Traffic Control Devices, US Department of Transportation, Federal Highway
Administration, US Government Printing Office, Washington, D.C. 1971, P236
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 176
20.3.2 Warrant 2: Interruptions of Continuous Traffic
This warrant is satisfied when, for each of eight hours of an average day, the specified
traffic volume exists on the major street and a higher volume in the minor street.
Table 20.2: Minimum Vehicular Volume Warrants
Number of lanes for Vehicles per hour on Vehicles per hour on higher
moving traffic on each major street (Total of both volume minor street approach.
approach approaches) (One direction only)
Major Minor
Street Street
1 1 750 75
2 or more 1 900 75
2 or more 2 or more 900 100
1 2 or more 750 100
Source: Manual on Uniform Traffic Control Devices, US Department of Transportation,
Federal Highway Administration, US Government Printing Office, Washington, D.C.
1971, P237
20.3.3 Warrant 3: Minimum Pedestrian Volume
The minimum pedestrian volume is satisfied when, for each of any eight hours of an
average day, the following traffic volumes exist.
• On the major street, 600 or more vehicles per hour enter the intersection (both
approaches) or 1000vph or more enter the intersection when a raised median or
width greater than 1.2m exists.
• During which eight hours as above, there are 150 or more pedestrians per hour on
the highest volume crosswalk.
20.3.4 Warrant 4: School Crossings
A traffic control signal (pedestrian) may be warranted at an established school crossing
when the number of adequate gaps in the traffic stream during period the children are
using the crossing is less than the number of minutes in the same period.
A traffic engineering study may need to be performed to determine the number of gaps in
the traffic flow based on the characteristics of the flow.
20.3.5 Warrant 5: Progressive Movement
Traffic signals are installed at carefully designed spacing to permit the relationship of
normal vehicle speed and signal timing to fit into a planned progressive movement of
traffic (platoon) along a route. The progressive signal warrant is satisfied when,
• On a one-way street that has pre-dominantly unidirectional traffic, the adjacent
signals are so far apart that they do not provide the necessary degree of vehicle
platooning and speed control.
• On a two way street, adjacent signals do not provide the necessary degree of
platooning and speed control and the proposed and adjacent signals could
constitute a progressive signal system.
20.3.6 Warrant 6: Accident Experience
The accident experience warrant is satisfied when:
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 177
• An adequate trail of less restrictive remedies with satisfactory observances and
enforcement has failed to reduce the accident frequency and;
• There exists a volume of vehicular traffic not less than 80 percent of the
requirements specified in the minimum vehicular volume warrant, the interruption
of continuous traffic warrant or the minimum pedestrian volume warrant and;
• The signal installation will not seriously disrupt progressive traffic flow.
• Five or more reported accidents of types susceptible to correction by traffic signal
control have occurred within a twelve month period.
20.3.7 Warrant 7: Systems
A warrant is created in order to provide a concentration and organization of traffic in a
major important route. A major route as defined in the above warrant is required to have
one or more of the following characteristics.
• It is a part of the street or highway system that serves as the principal network for
through traffic flow.
• It connects areas of principal traffic generation.
• It includes rural or suburban highway outside of, entering, or traversing a city.
• It has surface street freeway or expressway ramp terminals.
• It appears as a major route on an official plan such as a major street plan in an
urban area traffic transportation study.
20.3.8 Warrant 8: Systems
In exceptional cases, signals may occasionally be justified when no signal warrant is
satisfied but when any combination of warrants 1,2 and 3 is satisfied to the extent of 80
percent or more of the stated values.
20.4 Method of Capacity Analysis
Capacity analysis is concerned with the ability of a particular road or intersection to
accommodate an anticipated flow of people or vehicles. Capacity analysis is conducted to
meet a variety of needs in transportation design and managements, ranging from
performance assessment of existing highway system elements to the planning for system
extensions.
The two critical concepts employed in capacity analysis are capacity and level of service
(LOS). Capacity measures indicate the number of vehicles or people that can pass over a
highway element during some time interval. They do not, however provide any
information about congestion.
The capacity of a signalized intersection depends upon a number of factors as follows.
(a) Physical and Operating Conditions
• Width of approach
• One way or two way operation
• Parking conditions
(b) Environmental Conditions
• Degree of utilization of an individual approach.
• Variation of demand during the peak hour.
• Population of the area
• Location of the intersection within the metropolitan area.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 178
(c) Traffic Characteristics
• Turning movements
• Composition (trucks, buses, cycles etc)
(d) Control Measures
• Traffic signals, including cycle length, green time to cycle time ratio.
• Marking of approach lanes.
An intersection may have a number of approaches and the capacity of each approach
could be different depending on the above factors. In actual practice, the term
‘intersection capacity’ is used to signify the individual approach capacity.
20.5 Basic Model and Definitions
20.5.1 Basic Model
The basic model assumes that when the signal changes to green, the flow across the stop
line increases rapidly to a rate called the ‘Saturation Flow (S)” which remains constant
until either the queue is exhausted or the green period ends. Fig.20.1 demonstrates the
basic model of signal cycle.
Figure 20.1: Basic Model of Signal Design
20.5.2 Movement
The movement is defined as follows: Each separate queue leading to the intersection and
characterized by its direction is called a movement.
The signal phasing system determines the allocation of rights of way to individual system.
20.5.3 Phase
The Phase is defined as follows: Signal phase is a state of the signal during which one or
more movements receive right of way. Signal Phases will be defined in such a way that
when there is a change of right of way, that is when a movement is stopped and another
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 179
started, there is a phase change. A phase is identified by at least one movement gaining
right of way at the start of it and at least one movement losing the right of way at the end
of it.
20.5.4 Cycle
A signal cycle is one complete rotation through all of the indications provided.
20.5.5 Cycle Length
Cycle length is the time in seconds that it takes a signal to complete one full cycle of
indications. It indicates the time interval between the starting of green for one approach
till the next time the green starts.
20.5.6 Green Interval
It is the green indication for a particular movement or set of movements and is denoted
by Gi. This is the actual duration the green light of a traffic signal is turned on.
20.5.7 Red Interval
It is the red indication for a particular movement or set of movements and is denoted by
Ri. This is the actual duration the red light of a traffic signal is turned on.
20.5.8 Lost Interval
It indicates the time during which the intersection is not effectively utilized for any
movement. For example, when the signal for an approach turns from red to green, the
driver of the vehicle which is in the front of the queue will take some time to perceive the
signal (usually called as reaction time) and some time will be lost here before he moves.
20.6 Signal Timing Calculations and Capacity Analysis
20.6.1 General
Three measures of effectiveness are commonly used to evaluate signalized intersection
operations are as follows.
Capacity and volume-to-capacity ratio.
• Delay.
• Queue.
Delay and number of stops are the two basic measures of performance from which other
measures of performance such as fuel consumption, pollutant emissions, cost etc. can be
derived.
The calculation of signal timings (viz. cycle time, green times and offsets for co-
coordinated signals) which yield satisfactory operating conditions is determined by the
selection of a performance function to represent intersection operating conditions. The
traditional method of calculating signal timings for an isolated intersection uses the
vehicle delay as a measure of performance.
However, vehicle stops, queue length and person (pedestrian, bus passenger etc) delays
and stops should be also considered when determining signal timings.
Vehicle stops are important when factors such as vehicle operating costs (fuel
consumption, wear and tear) air pollution, annoyance to drivers and safety are considered.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 180
A different approach is to calculate a practical cycle time, i.e. a minimum cycle time
required to achieve various maximum acceptable degree of saturation constraints.
A prerequisite for the calculation of signal timing is to determine which movements are
critical. Once the critical movements are known, the intersection lost time, flow ratio and
green time ratio (L,Y,U respectively) can be calculated as the sum of corresponding
critical movement parameters (l,y,u). These are the parameters to be used in the cycle
time and green time calculations.
The capacity of a movement at traffic signals depend on the maximum sustainable rate at
which vehicles can depart, i.e. the saturation flow, S, and the proportion of the cycle time
which is effectively green for that movement (g/c).
20.6.2 Measurement of Saturation Flow
The capacity of a signal-controlled intersection is limited by the capacities of individual
approaches to the intersection. There are two types of factors which affect the capacity of
an approach. They are:
• Geometric factors
• Traffic and control factors
Further, the capacity of a movement at traffic signal depends on the maximum sustainable
rate at which vehicles can depart, i.e. the saturation flow and the proportion of the cycle
time which is effectively green for that period.
The saturation flow is independent of traffic control factors and is the maximum flow,
expressed in equivalent passenger car units that can be discharged from a traffic lane
when there is a continuous green indication and a continuous queue on the approach.
Despite the fact that the actual saturation flows should be measured in the field, a method
has been developed to estimate them in new signal installations.
20.7 Selection of Base Saturation Flow
20.7.1 Base Saturation Flow
At first, a base saturation flow should be selected for each lane allocated the movement
from table 20.3. This gives a general average saturation flow in through car units per
hour (tcu/hr) classified by the environment type and lane type.
Table 20.3: Average Saturation Flows in through Car Units per Hour for Estimation by
Environmental Class and Lane Type
Environment Class Lane type
1 2 3
A 1850 1810 1700
B 1700 1670 1570
C 1580 1550 1270
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 181
20.7.2 Environmental Classes
Environmental classes are defined as follows:
• Class A = Ideal or nearly ideal conditions for free movement of vehicles
(both approach and exit sides), good visibility, very few pedestrians, almost no
interference due to loading and unloading of goods, vehicles or parking turnover.
(Typically but not necessarily in a suburban, residential or parkland area)
• Class B = Average conditions, adequate intersection geometry, small to
moderate number of pedestrians, some interference by loading and unloading of
goods vehicles, parking turnover and vehicles entering and leaving premises.
(Typically but not necessarily in an industrial or shopping area)
• Class C = Poor conditions, large number of pedestrians, poor visibility,
interference from standing vehicles, loading and unloading of commercial
vehicles, taxis and buses and high parking turnover. (Typically but not necessarily
in a city centre area)
20.7.3 Lane Types
Lane types are defined as follows:
• Type 1 = through lane-a lane which contains through vehicles only.
• Type 2 = turning lane-a lane which contains any type of turning traffic. Adequate
turning radius and negligible pedestrian interference to turning vehicles.
• Type 3 = restricted turning lane-as for type 2, but turning vehicles are subjected to
small radius and/or some pedestrian interference.
20.8 Adjustment Factors to the Base Saturation Flow
The base saturation flow has to be adjusted to permit the various factors affecting the
saturation flow. After the adjustments, the saturation flow will be expressed as follows.
Saturation flow S:
fw fg
S= Sb
fc
Where:
Sb = Base saturation flow in through car units
fw = Lane width factor
fg = Gradient factor
fc = Traffic composition factor (tcu/veh) for a particular vehicle type and turning
traffic mix.
20.8.1 Lane Width Factor
Lane width factor is calculated as follows:
1.0 for w = 3.0 to 3.7
fw =
{ 0.55 + 0.14w for w < 3.0
0.83 + 0.05w for w > 3.7
Where w is the lane width (m). The values of fw =0.89 for w = 2.4m and fw = 1.06 for w =
4.6m can be considered to be lower and upper limits for the application of this formula.
For a varying lane width, the width at the narrowest point within 30m of the stop line
must be used in the above equation.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 182
20.8.2 Gradient Factor
If the effect of gradient is considered to be significant, the saturation flow should be
multiplied by the following factor:
f g = 1 0.5(Gr / 100)
Where Gr is the percent gradient. Use +Gr for downhill gradient to increase the saturation
flow, and –Gr for uphill gradients to decrease it.
20.8.3 Traffic Composition Factor
A traffic composition factor fc must be calculated to modify the saturation flow value
after adjustments for lane width and gradient so as to convert it from the standard through
car units to vehicles (Sveh=Stcu/fc). This is determined by the proportions of various
vehicle types and turning traffic which make up the movement under consideration. The
affects of different types of vehicle and turn are expressed in forms of through car
equivalents.
The traffic composition factor is calculated from the following equation.
fc =
e q i i
qi
Where:
qi = flow in vehicles for vehicle turn type i.
q = total movement flow (=Σqi)
ei = through car equivalent of vehicle turn type (tcu/veh)
Through car equivalents (tcu/veh) for different types of vehicle and turn are illustrated in
Table 20.4.
Table 20.4: Through Car Equivalents (tcu/Veh) for Different Types of Vehicle and Turns
Vehicle Type Through Unopposed Turn Opposed Turn
Normal Restricted
Car 1 1 1.25 e0
HV 2 2 2.5 e0+1
20.8.4 Types of Vehicles
In this design practice, only two vehicle types are considered. Any vehicle with more than
two axles or with dual tyres on the rear axles is defined as a heavy vehicle (HV).
Therefore buses, trucks, semi-trailers (articulated vehicles), cars towing trailers or
caravans, tractors and other slow-moving vehicles are classified as HV’s. All other (light)
vehicles are considered as CAR’s.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 183
20.8.5 Types of Turns
The effect of turning traffic (left or right) depends on whether it is an opposed movement
(i.e. if it has to give way to and look for gaps in a higher priority opposing movement), or
it is an unopposed movement. The opposing movement may be a vehicle or a pedestrian
movement.
(a) Unopposed Turn
Normal - This applies to both left turning and right turning vehicles and represents
the conditions where the radius of curvature of the turn is reasonably large and there is no
(or very little) pedestrian interference.
Restricted - This applies to both left turning and right turning vehicles which are
subject to a smaller turning radius and some interference by pedestrians. Turning vehicles
subject to interference by heavy pedestrian flows can be treated as opposed turns.
(b) Opposed Turn
Turning vehicles subject to interference by heavy pedestrian flows or vehicle movements
can be treated as opposed turns.
20.9 Critical Movement Search Table and Diagram
The critical movement search diagram is in fact a cyclic critical path diagram. It
facilitates to identify all paths from phase A to A and any additional paths, calculating the
total movement time, T=∑t, for each path and finding the path which gives the largest T
value.
The movements which form this path are called the critical movements.
Once the critical movements are known, the intersection lost time (L),flow ratio (Y) and
green time ratio (U) can be calculated as the sum of corresponding critical movement
parameters (l, y, u). These parameters are used in the cycle time and green time
calculations.
20.10 Cycle Time
20.10.1 Optimum Cycle Time
Approximate optimum cycle time Co is given by the following equation.
(1.4 + K ) L + b
Co =
1− y
Where;
Co -Approximate optimum cycle time in seconds.
L -Intersection lost time in seconds
Y -Intersection flow ratio
K -(=k/100) is the stop penalty parameter
k -0.4 for minimum fuel consumption
-0.2 for minimum cost (including the value of delay time)
-0.0 for minimum delay.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 184
20.10.2 Practical Cycle Time
Then the practical cycle Cp is given by the following equation.
L
Cp =
1−U
Where;
Cp -Practical cycle time in seconds
L -Intersection lost time
U -Intersection green time ratio
The inter-green time I is determined to allow vehicles in the terminating phase to clear the
intersection. I is normally in the range of 4-8 seconds.
20.10.3 Minimum Displayed Green Time (Gm)
Gm is in the range of 6-10 seconds for vehicles while it based on the pedestrian
requirements. In such circumstances it is dependent mainly on the clearance distance. Gm
for pedestrian movement is 1.1D or 5+D/1.4 whichever is larger where D is the kerb to
kerb crossing distance.
20.11 Delay Calculations
The approximate value of total delay (delay rate) for movement at isolated time signals
can be expressed as follows;
qc (1 − u)2
D= + No X
2(1 − y)
Where;
D -Total delay in vehicle hours per hour
qc -Average number of arrivals in vehicles per cycle. (q = flow in vehicles per
hour and c = cycle time in seconds)
u -Green time ratio (q/c)
y -Flow ratio (q/s)
No -Average overflow queue in vehicles
X -q/Q degree of saturation
20.12 Selection of Layout
First a cycle time (c) is chosen between optimum cycle time (co) and (cp). Further it
should satisfy the maximum cycle time constraints (180s). Movement, phase green times
and phase change times are calculated for the cycle time chosen. It is possible to select
the best design by comparing detailed performance statistics such as delay, number of
stops, queue length, measures of performance which combine delay and stops using a
stop penalty etc. The best design should yield the minimum value of the chosen
performance measure such as minimum delay, minimum stops and queue length etc.
20.13 Different Phase Diagrams and Junction Layouts
An adequate number of trials are necessary to finalize the final phasing arrangement and
junction layout. The choice of a phasing system depends on the intersection geometry and
the level of turning traffic flows. The primary goals of intersection design are to limit or
reduce the severity of potential road user conflicts while maximizing the operational
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 185
efficiency by reducing delays, queue lengths number of stops etc. The design of a phasing
system cannot be separated from the design of lane arrangements. The allocation of lanes
to various movements from each approach road must therefore be considered carefully
before the relative effectiveness of various phasing systems can be analyzed.
Following principles hold the dominancy in selecting a suitable layout for an intersection.
Discourage undesirable movements. Designers can utilize corner radii, raised medians, or
traffic islands to prevent undesirable or wrong-way movements.
• Define desirable paths for vehicles. The approach alignment to an intersection as
well as the intersection itself should present the roadway user with a clear
definition of the proper vehicle path.
• Encourage safe speeds through design. An effective intersection design promotes
desirable speeds to optimize intersection safety. The appropriate speed will vary
based on the use, type, and location of the intersection.
• Separate points of conflict where possible. Separation of conflict points can ease
the driving task while improving both the capacity and safety at an intersection.
• Facilitate the movement of high-priority traffic flows. Accommodating high-
priority movements at intersections addresses both driver’s expectations and
intersection capacity.
• Design approaches to intersect at near right angles and merge at flat angles.
Roadway alignments that cross as close to 900 degrees as practical can minimize
the exposure of vehicles to potential conflicts and reduce the severity of a conflict.
Skewed crossings produce awkward sight angles for drivers, which can be
especially difficult for older drivers.
• Provide safe refuge for pedestrians. Intersection design must consider the needs of
roadway users other than motorists. Intersection channelization can provide refuge
and/or reduce the exposure distance for pedestrians within an intersection without
limiting vehicle movement.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 186
20.14 Worked Example
You are given the task to do a signal design for the intersection Alpha in the city of Beta.
It is a 4 way intersection and its geometric details are as follows. Gradient is given
towards the intersection.
Intersection leg Available width (m) Gradient (%)
A 17.7 0.8 (downhill)
B 17.7 0.8 (uphill)
C 7 0.1 (downhill)
D 7 0.2 (uphill)
A B
Traffic data in the peak hour for this intersection was collected in a traffic survey and
tabulated as follows.
Intersection Leg Left Through Right
LV HV LV HV LV HV
A 38 3 615 10 151 2
B 69 6 630 4 152 4
C 55 1 64 1 26 1
D 32 5 80 4 20 5
You are required to do a complete design for this intersection selecting a suitable
geometric layout, phase arrangement and performing cycle time calculation etc.
20.14.1 Step 1: Select a Geometric Layout
Selecting a geometric layout involves deciding the number of lanes, their widths etc.
Further, it is necessary to have a rough idea of the phase arrangement to select the best
geometric layout.
Following geometric layout is considered viable assuming a separate right turn lane is
necessary for A and B legs.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 187
A B
20.14.2 Step 2: Select the Phase Arrangement
Phase arrangement was selected as follows, enabling two exclusive right turn movements
(3) and (4)
20.14.3 Step 3: Select the Base Saturation Flow
Approach Lane No. Movement Environment Lane Base Saturation
(Movement No.) Type Type Flow (Stcu)
A 1 B 3 1570
A 1 B 1 1700
A 3 B 2 1670
B 2 B 3 1570
B 2 B 1 1700
B 4 B 2 1670
C 5 B 3 1570
D 6 B 3 1570
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 188
Refer the Table 20.3 to find the base saturation flows.
20.14.4 Step 4: Adjust the Base Saturation Flow applying Lane Width Factor
and Gradient Factor
Appro Lane No. Movement Base Lane Lane Gradie Gradie Saturation
ach (Movem Saturation Width Width nt (%) nt Flow (Stcu)
ent No.) Flow (m) Factor Factor
(fW) (fg)
A 1 1570 3.3 1 0.8 1.004 1576
A 1 1700 3.3 1 0.8 1.004 1706
A 3 1670 3.3 1 0.8 1.004 1677
B 2 1570 3.3 1 -0.8 0.996 1564
B 2 1700 3.3 1 -0.8 0.996 1693
B 4 1670 3.3 1 -0.8 0.996 1663
C 5 1570 3.3 1 0.1 1.0005 1571
D 6 1570 3.3 1 -0.2 0.999 1568
20.14.5 Step 5: Perform Traffic Composition Adjustments and find the
Saturation Flow (SVeh)
Left Through Right
Approach Movement SUM fc Stcu=tcu/hr Sveh
LV HV LV HV LV HV
qi 38 3 615 10 666
1 ei 1.25 2.5 1 2 1.04 3282 3168
eiqi 47.5 7.5 615 20 690
A
qi 151 2 153
3 ei 1 2 1.01 1677 1655
eiqi 151 4 155
qi 69 6 630 4 709
2 ei 1.25 2.5 1 2 1.04 3257 3124
eiqi 86.3 15 630 8 739
B
qi 152 4 156
4 ei 1 2 1.03 1663 1621
eiqi 152 8 160
qi 55 1 64 1 26 1 148
C 5 ei 1.25 2.5 1 2 1 2 1.12 1571 1407
eiqi 68.8 2.5 64 2 26 2 165
qi 32 5 80 4 20 5 146
D 6 ei 1.25 2.5 1 2 1 2 1.17 1568 1343
eiqi 40 12.5 80 8 20 10 171
20.14.6 Step 6: Find the Critical Movements and draw the Critical Movement
Search Diagram
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 189
Practical degree of
Terminating phase
Arrival flow /(q)
100U + l (c=100)
displayed green
Intergreen time
Intergreen time
Saturation flow
effective green
Starting phase
/(s) veh/hr
Movement
Movement
saturation
Minimum
Minimum
Lost time
u (Y/Xp)
Critical?
Y (q/s)
veh/hr
t
Lane width check
D 1.1D 5+D/1.4
1 A B 5 8 666 3168 5 8 0.9 1 0.21 0.23 28.36 13 28
2 A B 5 8 709 3124 5 8 0.9 2 0.23 0.25 30.22 13 30 Yes
3 B C 5 8 153 1655 5 8 0.9 3 0.09 0.10 15.27 13 15
4 B C 5 8 156 1621 5 8 0.9 4 0.10 0.11 15.69 13 16 Yes
5 C D 5 8 148 1407 5 8 0.9 5 0.11 0.12 16.69 13 17
6 D A 5 8 146 1343 5 8 0.9 6 0.11 0.12 17.08 13 17
7 A B 5 10 Pedestrians 15 10 0.9 7 7.7 10 7 - - - 15 15
8 A B 5 10 Pedestrians 15 10 0.9 7 7.7 10 8 - - - 15 15
9 C D 5 19 Pedestrians 24 19 0.9 17.7 19 17.643 9 - - - 24 24 Yes
10 D A 5 19 Pedestrians 24 19 0.9 17.7 19 17.643 10 - - - 24 24 Yes
0.32 0.36
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 190
1
3 5
6
2
A B C D A
7
4 9
10
Critical Movement Search Diagram
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 191
20.14.7 Step 7: Draw the Reduced Critical Movement Search Diagram
2
4 9 10
A B C D A
Step 8: Do the Signal Timing Calculations
Y = y2 + y4
Y = 0.23 + .10
Y = 0.33
U = u2 + u4
U = 0.25 + 0.11
U = 0.36
L = l 2 + l 4 + l9 + l10
L = 5 + 5 + 24 + 24
L = 58s
Optimum cycle time
(1.4 + k ) * L + 6
C0 =
(1 − Y )
k = 0.2
(1.4 + 0.2) * 58 + 6
C0 =
(1 − 0.33)
C0 = 148s
Practical cycle time
L
C p=
(1 − U )
58
Cp =
(1 − 0.36)
C p = 91s
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 192
Selected cycle time =120s
Total available green time =120s-58s
=62s
This will be distributed to critical movements 1, 2, 3 and 4
u2 0.25
g2 = * (C − L) = * 62 =43s
U 0.36
u 0.11
g 4 = 4 * (C − L) = * 62 =19s
U 0.36
g 9 = g m9 =24s
g10 = g m10 =24s
Phase Green Time
GA =43s
GB =19s
GC =24s
GD =24s
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 193
CHAPTER 21 SIGNALIZED INTERSECTION DESIGN
21.01 Introduction
SIDRA Intersection is widely used to analyze the junction geometry in Sri Lankan
Highway Design industry. It is an easy to use software with a user friendly interface and
simplicity in analysis. The Designer is supposed to read Austroads Guide to Road Design
Part 4A: Unsignalized and Signalized Intersections for the geometric design of the
intersections. In geometric design, SIDRA is basically used to analyze the intersection to
assist the designer to arrive at the optimum geometric design of the intersection. The
usage of SIDRA for precise signal timing calculation is out of the scope of this book.
21.02 Traffic Data
Traffic data of the intersection for the peak hour has to be taken from the traffic counting
agency. A traffic count carried out for a 3 leg intersection is shown below. Heavy vehicle
count of each movement is shown inside the bracket.
21.03 Creating a Project in SIDRA Intersection
• Start SIDRA as any other Windows based programme
• File→Save As→[Select the Folder]→[Project Name]→Save
21.04 Intersection Treatment
• Go to Site Tab
• Select Signals
21.05 Intersection Type
• Go to Site Signals
• Select “At Grade Intersections”
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 194
• Site Input will change to match the selection
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 195
21.06 Site Input: Intersection
In this section, the designer is supposed to provide details on the Intersection layout. Once
the Intersection button is double clicked, an Intersection-Site-1 dialog box will appear as
follows;
The intersection is given as an eight leg intersection by default. Orange colour legs do
really exist and white colour legs can make to exist selecting them. The legs are named
direction wise but this is not a requirement when assigning the actual legs into the
programme.
Any leg can be made to cease to exist by making Leg Geometry = No leg.
• Go to Leg Geometry
• Select “No Leg” from the drop down box
A 3 leg junction is created as follows with that;
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 196
Then it is necessary to assign each imaginary legs to the actual legs in the intersection. In
this example, legs are assigned as follows;
• West - Katugasthota Leg
• East - Madawala leg
• North - Mathale leg
Each leg has to be selected individually and necessary parameters has to be inserted. A
worked example for West leg is shown below
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 197
• Press Apply and OK
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 198
21.07 Site Input: Movement Definitions
• [DC] on Movement Definitions
• Movement Definitions-Site 1 dialog box will appear
• Go to Origin Destination tab
In this tab, allowable movements should be defined for each leg. As an example, in a
situation where Right Turning Movement is prohibited, it can be inputted to the
programme by unticking the relevant box. A worked out example for West leg is shown
below.
By Clicking “View Display”, all the adjustments made so far can be visualized in a
separate pane. The display related to this example is shown below;
• Press OK
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 199
21.08 Site Input: Lane Geometry
Lane configurations, Lane disciplines and Lane geometry have to be given under this
Input.
• [DC] Lane Geometry
21.08.1 Lane Configurations
Lane configuration of each leg has to be given in this tab. Lane configuration tab, without
changes is shown in the following figure;
In this case, West leg is selected. By default, the programme has proposed 3 legs, one
being a short leg for the intersection area. This can be changed as per the designer’s
requirement. As an example, if two continuous straight lanes and one short left turning
lane to be introduced, it can be facilitated in this programme.
What is shown in red colour is the lane selected for adjustments. In this case it is the Left
turning lane. The designer can opt to design it as a “High Angle” or “Low Angle” lane,
difference of which can be visualized by pressing the “View Display” button on the top
right corner of the dialog box.
A worked out example is shown in the following figure;
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 200
Each and every lane should be adjusted this way in each and every leg. By default, Lane
number 03 is given as a short lane. If the road is 04 lane, this lane needs to be a full length
lane. It can be corrected by giving the Lane configuration as Full Length Lane.
In the same time, attention has to be focused on the Lane widths, Grades, and short lane
lengths where applicable.
Lane number 03 corrected to represent a Full Length Lane is shown in the figure that
follows. Gradient for all the lanes are taken as zero in this example.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 201
Adding or removing lanes can be performed in any stage of the Lane Geometry Tab, Lane
Configuration, Lane Disciplines or Lane Data by using the buttons beneath the Lane
Editor diagram.
View Display Button is a convenient tool to visualize the actual modelling of the
intersection and the changes made with the each step. The intersection developed so far is
visualized in the following figure by pressing the View Display.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 202
Now in this diagram, it should be observable to an experienced highway designer that
following flaws need to be corrected.
1. Additional Merging lane to be added to the North Leg to merge the Left Turn
traffic of the West Leg (this section)
2. Left lane should be made exclusive by removing the through traffic component
(Vide 9.7.1)
Adding an exit lane is carried out by selecting the relevant leg under the Lane
Configuration and adding a lane to the exit side as follows.
This new lane can be changed to represent a merging lane by making it a short lane. A
worked example and the resulting Layout diagram follow;
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 203
Note that this diagram needs to be further corrected with Centre Median widths, Lane
Disciplines etc.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 204
21.08.2 Lane Disciplines
Lane Disciplines are the movements permitted in a particular lane. In this example, it
should be obvious to the designer that the discipline of the lane number 01 of West leg
should be corrected as it shows through movement and left turn by default but only the
left turn can be allowed. Note that this also needs to be carried out to each lane of the
each leg.
• Go to Lane Disciplines tab
• Select the relevant leg
• Select the relevant lane
• Input the correct the lane disciplines
• Process Site→Apply→OK
So corrected left lane leg in the Lane Disciplines tab and the resulting Layout diagram
follows;
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 205
21.08.3 Lane Data
The final stage of Lane Geometry is the Lane Data where the designer is supposed to
input the Approach lane data. Basic saturation flow for each leg has to be extracted from
the Table 5.1 of Traffic Signals: Capacity & Timing Analysis, Australian Road Research
Board, Research Report [ISSN 0518-0728]
• Go to Lane Disciplines tab
• Select the relevant leg
• Give the Basic Saturation Flow
• Process Site and OK
21.09 Site Input: Lane Movements
In this tab, the designer is able to give Lane Movement Flow Proportions. It is to be noted
that Exit Lanes mentioned in this tab are relevant to each movement and to the relevant
leg. These usually need not to be adjusted.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 206
For instance Exit Lane 1-100% means that all the traffic from left lane in the West end
are directed to the Exit Lane 1 of the North Direction.
100%
21.10 Site Input: Pedestrian Movement Data
In the next tab, Pedestrian data, if the pedestrian data of the project are different from the
default values, they need to be corrected
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 207
21.11 Site Input: Volumes
Traffic Data need to be inserted to this dialog box. A worked out example for the West
Leg is shown below
Traffic Data for each leg and each movement need to be inserted separately.
• Input the relevant data
• Apply→Process Site→OK
21.12 Site Input: Priorities
Keep the default values
21.13 Site Input: Gap Acceptance
Keep the default values
21.14 Site Input: Vehicle Movement Data
In this tab, Approach cruise speed and Exit cruise speed can be changed based on the
local experience. A worked out example is shown below;
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 208
21.15 Site Input: Phasing & Timing
It is advisable to provide a phasing diagram of the designer’s choice based on the local
experience and the professional judgement. It is possible to delete any default phase by
pressing the delete button on the dialog box.
A worked out example for Phasing and Timing follows;
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 209
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 210
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 211
• Process Site and OK
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 212
21.16 Site Output: Diagnostics
If no errors are detected, the Diagnostics report would appear as follows;
21.17 Site Output: Other Details
SIDRA displays the following analysis reports in this exercise;
• Timing Analysis
• Movement Timing
• Saturation Flows
• Signal Coordination
• Site Graphs
• Site Variable Run
• Movement Displays
• Lane Displays
21.17.1 Lane Level of Service
Lane Level of Service can be investigated using SIDRA as follows
• Site Output→Lane Displays→ Lane Level of Service
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 213
With this diagram, the Lane Level of Service is displayed. This can be used to do the
necessary adjustments to the phasing and timing.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 214
21.18 Geometric Design of the Intersection
Finally, the layout diagram so derived can be used to do the geometric design.
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
G e o m e t r i c D e s i g n o f H i g h w a y s & I n t e r s e c t i o n : A H a n d b o o k P a g e | 215
Eng. S.A.S.T Salawavidana passed out as a Civil Engineer from the University of Peradeniya in year 2004. He
completed his Master of Engineering Degree in Highway and Traffic Engineering from the University of
Moratuwa in year 2011. He is a Chartered Engineer and Fellow of the Institution of Engineers Sri Lanka
(IESL). In addition, he is a Chartered Highway Engineer and Fellow of the Chartered Institution of Highways
& Transportation (CIHT) and a Chartered Civil Engineer and Member of the Institution of Civil Engineers
(ICE) in United Kingdom. With an Advanced Diploma in IT from the University of Colombo, he is a
Professional Member of the Computer Society of Sri Lanka (CSSL) as well.
Eng. S.A.S.T Salawavidana is currently serving as the Additional Director (Highway Design) of Road
Development Authority. His notable contributions are for the Central Expressway and Ruwanpura
Expressway projects in addition to numerous mega scale highway design projects in Sri Lanka. In the meantime,
he has trained many engineers for the Chartered Engineer qualifications of the IESL throughout two decades in the
Highway Design Office of RDA.
In addition to his professional commitment, Eng. S.A.S.T Salawavidana has contributed to the Sri Lankan academia
through IESL and national universities of Sri Lanka. He is as a Visiting Lecturer and a Resource Person for CPDs, an
invited Reviewer for research projects and invited public speaker in knowledge sharing sessions of the IESL.
Eng. S.A.S.T Salawavidana is a Visiting Lecturer of University of Moratuwa for the subject of Computer Aided
Highway Design for their BSc.Eng and MEng programmes. He is also a viva panelist and an invited Reviewer of
Transport Research Forum (TRF) of the same University. Eng. S.A.S.T Salawavidana is also a Visiting Lecturer of the
University of Sri Jayawardhenepura and one of their External Supervisors for research.
This book is a compilation of the author’s long standing experience and knowledge as an engineer and academic for
the benefit of the engineering students and fresh engineers entering the field of the Highway Design
Scan to watch YouTube Lessons
Eng. S.A.S.T Salawavidana
CEng FIE (SL), CEng FCIHT (UK), CEng MICE (UK), MEng (Highway & Traffic), BSc.Eng (Hons), MCS (SL), Adv.Cert (IT)
You might also like
- Bailey BRIDGE CALCULATION 3-1 L 18m, Page 1-5Document5 pagesBailey BRIDGE CALCULATION 3-1 L 18m, Page 1-5Nam Tran100% (1)
- MMSD PDFDocument9 pagesMMSD PDFFelipe Valverde ChavezNo ratings yet
- Oyenuga 249568417 Fundamentals of RCC DesignDocument8 pagesOyenuga 249568417 Fundamentals of RCC DesignKennyNo ratings yet
- TMH7 Part3 1989 Code of Prac For The Des of HighDocument160 pagesTMH7 Part3 1989 Code of Prac For The Des of HighJunithan Moodley100% (1)
- Slab Design To BS 8110Document11 pagesSlab Design To BS 8110Samuel Antobam100% (2)
- Design of Secant Pile Wall PDFDocument1 pageDesign of Secant Pile Wall PDFNaveen BP100% (1)
- MMSL Cabo San Lucas, Mexico: Lucas One (Lucas1) ArrivalDocument4 pagesMMSL Cabo San Lucas, Mexico: Lucas One (Lucas1) ArrivalRichy GarciaNo ratings yet
- RBE Micro ProjectDocument17 pagesRBE Micro ProjectAkash Chourasia100% (2)
- Reinforced Concrete Design Concepts and Formulas, John M. RobbertsDocument52 pagesReinforced Concrete Design Concepts and Formulas, John M. RobbertsMuhannad AbdulRaouf100% (1)
- 02 Bridge Loading PDFDocument77 pages02 Bridge Loading PDFpasiyaNo ratings yet
- Concrete Bridge Design To BS 5400 L A Clark 1981 PDFDocument96 pagesConcrete Bridge Design To BS 5400 L A Clark 1981 PDFjohnson100% (4)
- Bridge Design BS 5400Document4 pagesBridge Design BS 5400aldeto71100% (1)
- Structural Design of Reinforced Concrete U-Shaped Channels, Basins and Drop StructuresDocument39 pagesStructural Design of Reinforced Concrete U-Shaped Channels, Basins and Drop Structurescaballerolang50% (4)
- Requirement For Bursting Reinforcement in Pile CapsDocument3 pagesRequirement For Bursting Reinforcement in Pile CapsSwopnil KalikaNo ratings yet
- Rectangular Hollow Sections - Hot FormedDocument5 pagesRectangular Hollow Sections - Hot FormedAristotle MedinaNo ratings yet
- Wind Load Calculations To CP3Document1 pageWind Load Calculations To CP3Vasanthapragash Nadarajha33% (3)
- RecamberingDocument4 pagesRecamberingSuneth ThusharaNo ratings yet
- Wind Calculation-BS8110Document47 pagesWind Calculation-BS8110thanigai veluNo ratings yet
- Loading To Box CulvertsDocument20 pagesLoading To Box CulvertsPaddie MwangiNo ratings yet
- Road Geometric Design Manual PDFDocument48 pagesRoad Geometric Design Manual PDFNaveen SinghNo ratings yet
- BoxDocument16 pagesBoxAlfred KameyaNo ratings yet
- Road Design Manual - GDRTDocument160 pagesRoad Design Manual - GDRTThomas100% (2)
- In-Plant Training ReportDocument44 pagesIn-Plant Training ReportAchala Fernando50% (2)
- Pier Design Example - US Units - Design Step 8Document45 pagesPier Design Example - US Units - Design Step 800152100% (1)
- 10-Retaining Wall and PilesDocument25 pages10-Retaining Wall and PilesAhmed KhalifaNo ratings yet
- 4 Masonry Abutment DesignDocument4 pages4 Masonry Abutment DesignAlemie Shita100% (1)
- Design Shear Resistance (Beams EC2)Document2 pagesDesign Shear Resistance (Beams EC2)dhanya1995No ratings yet
- BS4466Document22 pagesBS4466Buddhika EdirisooriyaNo ratings yet
- Structural Timber Design Ho 5Document86 pagesStructural Timber Design Ho 5LUGHANO NGAJILONo ratings yet
- Design of Continuous Footing-1 PDFDocument8 pagesDesign of Continuous Footing-1 PDFSamuel Antobam100% (2)
- Slab Culvert Design With Example (Upto Moment Calculation)Document14 pagesSlab Culvert Design With Example (Upto Moment Calculation)VYSYAKH AJITHNo ratings yet
- HA and HB Type LoadingDocument16 pagesHA and HB Type LoadingHilman Netjibvute100% (1)
- H25 Loading - 1Document6 pagesH25 Loading - 1G.RameshNo ratings yet
- Basic Structural Analysis by C.S. ReddyDocument4 pagesBasic Structural Analysis by C.S. ReddyArif Ahmed Laskar0% (6)
- Design of A Flexible Pavement For The Danfa-Otinibi RoadDocument51 pagesDesign of A Flexible Pavement For The Danfa-Otinibi RoadIddrisu NajeedNo ratings yet
- Load Combinations (USD - Page: 688) : 1.2 DL +LL + Eqx 1.2 DL +LL - Eqx 1.2 DL +LL + Eqy 1.2 DL +LL - EqyDocument3 pagesLoad Combinations (USD - Page: 688) : 1.2 DL +LL + Eqx 1.2 DL +LL - Eqx 1.2 DL +LL + Eqy 1.2 DL +LL - Eqyrafia kamalNo ratings yet
- Culvert အကြောင်းသိကောင်းစရာများ (Saya Thet Lwin)Document91 pagesCulvert အကြောင်းသိကောင်းစရာများ (Saya Thet Lwin)Myanmar ZorroNo ratings yet
- Wind Load Calculation For Pitched RoofDocument2 pagesWind Load Calculation For Pitched RoofNAYAN RANPURANo ratings yet
- BS 8666-2005 Scheduling, Dimensioning, Bending and Cutting of Steel Reinforcing For ConcreteDocument8 pagesBS 8666-2005 Scheduling, Dimensioning, Bending and Cutting of Steel Reinforcing For ConcreteapirakqNo ratings yet
- Design and Detailing of Approach SlabsDocument1 pageDesign and Detailing of Approach SlabsIsaac Mureithi MainaNo ratings yet
- Design of Steel Structure PDFDocument2 pagesDesign of Steel Structure PDFRajarshi Chakraborty100% (1)
- Bridge Design Manual Part 3 - July14Final MASTERDocument50 pagesBridge Design Manual Part 3 - July14Final MASTERTsegawbezto75% (4)
- J Bolt Precast Anchor Design ExampleDocument4 pagesJ Bolt Precast Anchor Design ExampleruayoNo ratings yet
- Foundation-Base Fixed or Pin in Modelling of StructureDocument2 pagesFoundation-Base Fixed or Pin in Modelling of StructureThiha Kyaw100% (1)
- Cads RC (I) TutorialDocument327 pagesCads RC (I) TutorialNoah GarciaNo ratings yet
- Systems of PrestressingDocument29 pagesSystems of PrestressingroshiniNo ratings yet
- v2 TD S P 1002 1 F Shape Parapet 1 22m High Type A B General Layout and SectionsDocument1 pagev2 TD S P 1002 1 F Shape Parapet 1 22m High Type A B General Layout and SectionsSudathipTangwongchaiNo ratings yet
- PT EUrocodeDocument90 pagesPT EUrocodeKilaru HareeshNo ratings yet
- Free Download Here: British Standard Code of Practice Cp110 PDFDocument2 pagesFree Download Here: British Standard Code of Practice Cp110 PDFخالد حسن0% (1)
- Design of RCC Lintel: - Arun KuraliDocument24 pagesDesign of RCC Lintel: - Arun KuraliAmit GuptaNo ratings yet
- Fundamental of Bridge Design UE 452 - Design of RC Structures II, 342Document71 pagesFundamental of Bridge Design UE 452 - Design of RC Structures II, 342Saranyaleo100% (1)
- Property ModifiersDocument2 pagesProperty Modifierspido29100% (1)
- NBC 105 Revision Commentary V1.2Document59 pagesNBC 105 Revision Commentary V1.2Abinash Mandal100% (1)
- RSA Report E-W HighwayDocument35 pagesRSA Report E-W HighwayManisha Bhattarai CRN080No ratings yet
- Final Design Report-TANROADSDocument94 pagesFinal Design Report-TANROADSJOSHUA KWIMBANo ratings yet
- ECE 2403 Highway Engineering IDocument101 pagesECE 2403 Highway Engineering IKiplgat ChelelgoNo ratings yet
- Review of Tanzania Road Geometric Design ManualDocument73 pagesReview of Tanzania Road Geometric Design ManualGilbert MaroNo ratings yet
- Final Report KRR 5 31Document74 pagesFinal Report KRR 5 31Padma Shahi100% (1)
- City Park Streetcar Full StudyDocument171 pagesCity Park Streetcar Full StudyJermy TomasoaNo ratings yet
- Guideline Fencing Edging Treatments For Cycling InfrastructureDocument50 pagesGuideline Fencing Edging Treatments For Cycling InfrastructuresaobracajniNo ratings yet
- C3D Guide 2023 SunethDocument97 pagesC3D Guide 2023 SunethSuneth Thushara100% (2)
- A Complete Guide To Computer Aided Highway Design in Sri LankaDocument138 pagesA Complete Guide To Computer Aided Highway Design in Sri LankaSuneth ThusharaNo ratings yet
- MI - Pinard J - Hongve 2014 UseofDCPMethodforLVSRoadsMalawi AFCAP v141119 - RedactedDocument52 pagesMI - Pinard J - Hongve 2014 UseofDCPMethodforLVSRoadsMalawi AFCAP v141119 - RedactedEngr Nissar KakarNo ratings yet
- Highway Construction Methods-Road BaseDocument16 pagesHighway Construction Methods-Road BaseSuneth ThusharaNo ratings yet
- Subbase ConstructionDocument18 pagesSubbase ConstructionSuneth ThusharaNo ratings yet
- Towards A Safer & Effective Bicycle Lane Implementation in Sri Lankan HighwaysDocument32 pagesTowards A Safer & Effective Bicycle Lane Implementation in Sri Lankan HighwaysSuneth Thushara100% (1)
- C3D Guide 2023 SunethDocument97 pagesC3D Guide 2023 SunethSuneth Thushara100% (2)
- History: Stage Carriage Act 1832Document1 pageHistory: Stage Carriage Act 1832Cristina FurnicaNo ratings yet
- EscalatorsDocument13 pagesEscalatorsbhattparthivNo ratings yet
- Pavement Design Guidelines PDFDocument25 pagesPavement Design Guidelines PDFRian IbayanNo ratings yet
- KRC Infra Ongoing ProjectsDocument4 pagesKRC Infra Ongoing ProjectsSaurabh SrivastavaNo ratings yet
- Railway EngineeringDocument4 pagesRailway Engineeringhelloitskalai67% (3)
- TCS Four Lane (Survey)Document1 pageTCS Four Lane (Survey)LokeshNo ratings yet
- Geometric DesignDocument54 pagesGeometric DesignDerek ARPHULNo ratings yet
- Longitudinal Elevation On 'XZ': A1 P1 A2 P2 P3Document6 pagesLongitudinal Elevation On 'XZ': A1 P1 A2 P2 P3MATHANNo ratings yet
- Positioning of Irc Live LoadsDocument3 pagesPositioning of Irc Live Loadsvasu7900100% (1)
- City of Peterborough Draft Traffic Calming PolicyDocument74 pagesCity of Peterborough Draft Traffic Calming PolicyPeterborough ExaminerNo ratings yet
- Traffic Management Systems (TMS)Document12 pagesTraffic Management Systems (TMS)Mashood Olamilekan MuhammedNo ratings yet
- As 1742.3-2009 Manual of Uniform Traffic Control Devices Traffic Control For Works On RoadsDocument9 pagesAs 1742.3-2009 Manual of Uniform Traffic Control Devices Traffic Control For Works On RoadsSAI Global - APAC0% (2)
- City of Corpus Christi's Bond Program GuideDocument14 pagesCity of Corpus Christi's Bond Program GuidecallertimesNo ratings yet
- Update Strip Map CSP 16-08-2023 Sta 17+800Document12 pagesUpdate Strip Map CSP 16-08-2023 Sta 17+800Arman SyahNo ratings yet
- NCHRP RPT 375Document103 pagesNCHRP RPT 375Victor OlmedoNo ratings yet
- PUC 3114 Project Assignment Work Aug 2023Document8 pagesPUC 3114 Project Assignment Work Aug 2023SKynet Movies Cyber PS4No ratings yet
- Preliminary Examinations in Transportation Engineering (Set B)Document4 pagesPreliminary Examinations in Transportation Engineering (Set B)Ramil S. ArtatesNo ratings yet
- New HomeownerDocument64 pagesNew HomeownerKVNNo ratings yet
- Department of Public Works and Highways: Office of The Regional DirectorDocument1 pageDepartment of Public Works and Highways: Office of The Regional DirectorLimuel Richa Paghubasan TrangiaNo ratings yet
- Rail Safety - Train Protection and Warning System (TPWS) Fitment at Permanent Speed RestrictionsDocument63 pagesRail Safety - Train Protection and Warning System (TPWS) Fitment at Permanent Speed RestrictionsMadhu SudanNo ratings yet
- Cumana, Venezuela Svcu/Cum: .Eff.27.AprDocument3 pagesCumana, Venezuela Svcu/Cum: .Eff.27.AprOperaciones ConviasaNo ratings yet
- Walkability - Design Solutions - Trichy, IndiaDocument13 pagesWalkability - Design Solutions - Trichy, IndiaBharath AkurathiNo ratings yet
- UP North Platte TT3 7-3-07Document44 pagesUP North Platte TT3 7-3-07Harley GlayzerNo ratings yet
- Final Skywalk Feasibility Report DULT BangaloreDocument69 pagesFinal Skywalk Feasibility Report DULT BangaloreSanjeev Dyamannavar100% (2)
- GCOE, Jalgaon: Chapter 9. Stations and YardsDocument14 pagesGCOE, Jalgaon: Chapter 9. Stations and YardsudayNo ratings yet
- 06 Track Technical SpecificationDocument14 pages06 Track Technical SpecificationpeymanNo ratings yet
- Complete Item CodesDocument43 pagesComplete Item CodesGenevieve GayosoNo ratings yet