Download as pdf or txt
You might also like
- Service Manual: X-Ray Beam Collimator For Surgery Systems 9896 010 2320Document32 pagesService Manual: X-Ray Beam Collimator For Surgery Systems 9896 010 2320Rogerio CastroNo ratings yet
- The Dynamics of Money and A New Class of Self-Organized Critical SystemsDocument78 pagesThe Dynamics of Money and A New Class of Self-Organized Critical SystemspostscriptNo ratings yet
- Script Swiss Physics Olympiad 2 EditionDocument282 pagesScript Swiss Physics Olympiad 2 EditionBertram ReichardtNo ratings yet
- (Developing Qualitative Inquiry (Book 13)) Max van Manen - Phenomenology of Practice_ Meaning-Giving Methods in Phenomenological Research and Writing (Developing Qualitative Inquiry) (Volume 13)-RoutlDocument413 pages(Developing Qualitative Inquiry (Book 13)) Max van Manen - Phenomenology of Practice_ Meaning-Giving Methods in Phenomenological Research and Writing (Developing Qualitative Inquiry) (Volume 13)-RoutlKarl Ecce Medicus100% (9)
- SN500SA AnglDocument406 pagesSN500SA AnglDarekNo ratings yet
- Adjustment TheoryDocument46 pagesAdjustment TheoryronleungNo ratings yet
- Tex ThesisDocument61 pagesTex ThesisRadjai AbirNo ratings yet
- Quaternions TheoryDocument103 pagesQuaternions TheoryAntonio GargiuloNo ratings yet
- Introduction To Geostatistics - Course Notes: Ye Zhang Dept. of Geology & Geophysics University of WyomingDocument36 pagesIntroduction To Geostatistics - Course Notes: Ye Zhang Dept. of Geology & Geophysics University of WyomingAhmed GhoneimNo ratings yet
- Arpita Thesis 1Document186 pagesArpita Thesis 1Aparajita SenguptaNo ratings yet
- A Matrix Method of Solving The Schrodinger EquatioDocument43 pagesA Matrix Method of Solving The Schrodinger EquatioAlexandre Masson VicenteNo ratings yet
- Lecture Notes in Adaptive Filters: Second EditionDocument67 pagesLecture Notes in Adaptive Filters: Second Editionkarthik gNo ratings yet
- Math 235-2017 LecDocument178 pagesMath 235-2017 LecMotsomiNo ratings yet
- Smtb000 GuideDocument186 pagesSmtb000 GuideNkululeko BandaNo ratings yet
- YE ZHANG, Introduction To GeostatisticsDocument36 pagesYE ZHANG, Introduction To Geostatisticsmesquida1993No ratings yet
- Notes 20220602Document208 pagesNotes 20220602YehorNo ratings yet
- An Introduction To Geometric Algebra and Calculus - Bromborsky, A PDFDocument223 pagesAn Introduction To Geometric Algebra and Calculus - Bromborsky, A PDFRodrigo Ledesma100% (1)
- Cursus Advanced EconometricsDocument129 pagesCursus Advanced EconometricsmaxNo ratings yet
- Numerical MethodDocument84 pagesNumerical MethodShamit RathiNo ratings yet
- 133A NoteDocument74 pages133A NoteHariNanduNo ratings yet
- SG Pdf#section 1 5Document293 pagesSG Pdf#section 1 5Lusako MwaijandeNo ratings yet
- Algebra Sem1 SolutionsDocument88 pagesAlgebra Sem1 Solutionstevez.msizaNo ratings yet
- Harold Erbin - Notes PDFDocument274 pagesHarold Erbin - Notes PDFSeyf KaddachiNo ratings yet
- Classnotes Ma1101 PDFDocument134 pagesClassnotes Ma1101 PDFSathvik JoelNo ratings yet
- JB Ies 109 Exercises AnswersDocument246 pagesJB Ies 109 Exercises AnswersLaura GillisNo ratings yet
- Theory of Computation-Lecture Notes: Michael Levet August 27, 2019Document119 pagesTheory of Computation-Lecture Notes: Michael Levet August 27, 2019Mohit BhattNo ratings yet
- Analysis Notes by Linhan Li and David QuinnDocument70 pagesAnalysis Notes by Linhan Li and David Quinnliuchris76No ratings yet
- Geodetic SurveyingDocument78 pagesGeodetic Surveyingጇን ጁንስNo ratings yet
- SFT IntroDocument179 pagesSFT Introatticus peinNo ratings yet
- Nico Sneeuw, F. Kruum, Adjustment Theory - Lecture Notes 2015Document153 pagesNico Sneeuw, F. Kruum, Adjustment Theory - Lecture Notes 2015Cristian IonceaNo ratings yet
- Kuan C.-M. Introduction To Econometric Theory (LN, Taipei, 2002) (202s) - GLDocument202 pagesKuan C.-M. Introduction To Econometric Theory (LN, Taipei, 2002) (202s) - GLMateus RamalhoNo ratings yet
- Technical Analysis and Time SeriesDocument75 pagesTechnical Analysis and Time SeriesQuant TradingNo ratings yet
- A Simple Note On Topics of Micro TheoryDocument39 pagesA Simple Note On Topics of Micro TheoryMichaelNo ratings yet
- Script Swiss Physics Olympiad 4 EditionDocument398 pagesScript Swiss Physics Olympiad 4 EditionsajjadNo ratings yet
- Study Guide For STA3701Document325 pagesStudy Guide For STA3701leratobaloyi386No ratings yet
- Main PDFDocument143 pagesMain PDFmohmmad mahmoodNo ratings yet
- Lectures Stat Field Theory VnewDocument194 pagesLectures Stat Field Theory VnewNikos PapanikolaouNo ratings yet
- Robust Compressed SensingDocument45 pagesRobust Compressed SensingavishwasNo ratings yet
- 22 Scheme Physics For Cse Module 5 NotesDocument32 pages22 Scheme Physics For Cse Module 5 Notesjayanthibalasubramani2100% (1)
- Introduction To Scientific Computing With Maple ProgrammingDocument215 pagesIntroduction To Scientific Computing With Maple ProgrammingPhilip PhamNo ratings yet
- LsevpDocument242 pagesLsevpArvind NagarajanNo ratings yet
- QFT PDFDocument529 pagesQFT PDFThiago MilogranoNo ratings yet
- Continuous Dynamics On Metric Spaces Version 1.1 by Craig CalcaterraDocument206 pagesContinuous Dynamics On Metric Spaces Version 1.1 by Craig CalcaterraCraig CalcaterraNo ratings yet
- Econ 3049: Econometrics: Department of Economics The University of The West Indies, MonaDocument16 pagesEcon 3049: Econometrics: Department of Economics The University of The West Indies, MonasinglethugNo ratings yet
- Lecture Notes Vector Analysis MATH 332: Ivan AvramidiDocument118 pagesLecture Notes Vector Analysis MATH 332: Ivan AvramidiAdewole Adeyemi Charles100% (3)
- Nelder Mead AlgoDocument119 pagesNelder Mead AlgoNgoc-Trung NguyenNo ratings yet
- Ref Jaj 1999Document74 pagesRef Jaj 1999gcinarNo ratings yet
- Linear Algebra A Modern Introduction 3rd Edition Poole Solutions ManualDocument77 pagesLinear Algebra A Modern Introduction 3rd Edition Poole Solutions ManualJessicaPorteraiydm100% (19)
- DifferentiationDocument80 pagesDifferentiationyahmedpersNo ratings yet
- Easure Heory Otes: Mr. Andrew L Pinchuck Department of Mathematics (Pure & Applied) Rhodes UniversityDocument74 pagesEasure Heory Otes: Mr. Andrew L Pinchuck Department of Mathematics (Pure & Applied) Rhodes UniversityJahir Uddin LaskarNo ratings yet
- Functional Analysis Master PDFDocument107 pagesFunctional Analysis Master PDFrapsjadeNo ratings yet
- Lecture Notes On General RelativityDocument954 pagesLecture Notes On General RelativityLeo PipoloNo ratings yet
- SampleDocument34 pagesSampleMuhammad GulfamNo ratings yet
- Lecture Notes - Kristiaan PelckmansDocument153 pagesLecture Notes - Kristiaan PelckmansFrancisco Saavedra Rodriguez100% (1)
- Math562 ContinuousOptimizationDocument126 pagesMath562 ContinuousOptimizationDSP111No ratings yet
- Maths Pack 10 UpdateDocument281 pagesMaths Pack 10 UpdateDragan PetkanovNo ratings yet
- Math MethodsDocument137 pagesMath Methodssoket moNo ratings yet
- Bartels2015 Book NumericalMethodsForNonlinearPaDocument394 pagesBartels2015 Book NumericalMethodsForNonlinearPakeyqyoNo ratings yet
- Automatic Speech and Speaker Recognition: Large Margin and Kernel MethodsFrom EverandAutomatic Speech and Speaker Recognition: Large Margin and Kernel MethodsJoseph KeshetNo ratings yet
- Template Matching Techniques in Computer Vision: Theory and PracticeFrom EverandTemplate Matching Techniques in Computer Vision: Theory and PracticeNo ratings yet
- Theories of UniverseDocument18 pagesTheories of UniverseRoseMarie MasongsongNo ratings yet
- A Mathematical Model For Predicting The Relaxation of Creep Strains in MaterialsDocument18 pagesA Mathematical Model For Predicting The Relaxation of Creep Strains in MaterialsAmina DinariNo ratings yet
- (14-25) Hamaker ApproachDocument12 pages(14-25) Hamaker ApproachSunday IweriolorNo ratings yet
- Chemistry For EngineersDocument4 pagesChemistry For EngineersRainNo ratings yet
- E1960 PDFDocument5 pagesE1960 PDFdannychacon27No ratings yet
- Elementary SignalsDocument29 pagesElementary SignalsAngga BenningtonNo ratings yet
- Optical PropertiesDocument7 pagesOptical PropertiesTowfic Aziz KanonNo ratings yet
- Orifice and Jet Trajectory TestDocument8 pagesOrifice and Jet Trajectory Testali najat0% (2)
- Worksheet 6ADocument2 pagesWorksheet 6AZhang JiangNo ratings yet
- 46/4kv Sub RebuilcDocument200 pages46/4kv Sub RebuilcTriska SimanjuntakNo ratings yet
- Special Relativity ExamplesDocument10 pagesSpecial Relativity ExamplesMaryam Taba100% (1)
- 100 Science Quizzes & AnswersDocument10 pages100 Science Quizzes & AnswersDen AloyaNo ratings yet
- Full Download Solution Manual For Understanding Our Universe 3rd Edition by Stacy Palen Laura Kay George Blumenthal PDF Full ChapterDocument36 pagesFull Download Solution Manual For Understanding Our Universe 3rd Edition by Stacy Palen Laura Kay George Blumenthal PDF Full Chapterancientypyemia1pxotk100% (26)
- Theory of Construction of The Giza Plateau Pyramids (Original Title Hypothesis of Construction of The Pyramids of The Valley of Gizeh (Giza)Document15 pagesTheory of Construction of The Giza Plateau Pyramids (Original Title Hypothesis of Construction of The Pyramids of The Valley of Gizeh (Giza)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Y6 5 Statistics ReasoningDocument8 pagesY6 5 Statistics ReasoningThi Võ HồngNo ratings yet
- Static and Transient Analysis of Radial Tires Using ANSYS: Tgiurgiu@acttm - Ro Fciortan@acttm - Ro Cristinapupaza@yahoo - Co.ukDocument5 pagesStatic and Transient Analysis of Radial Tires Using ANSYS: Tgiurgiu@acttm - Ro Fciortan@acttm - Ro Cristinapupaza@yahoo - Co.uknaderNo ratings yet
- Formula SheetDocument7 pagesFormula SheetFelipe RincónNo ratings yet
- CE 370-Lecture-7 (Flexural Behavior of RC Beams - Ultimate Stage) (Read-Only) PDFDocument24 pagesCE 370-Lecture-7 (Flexural Behavior of RC Beams - Ultimate Stage) (Read-Only) PDFJamal RkhNo ratings yet
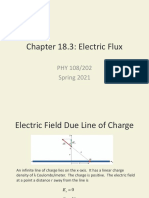
- Chapter 18.3: Electric Flux: PHY 108/202 Spring 2021Document18 pagesChapter 18.3: Electric Flux: PHY 108/202 Spring 2021Emmeline Lemos WatsonNo ratings yet
- Preventive Maintenance - HematologyDocument5 pagesPreventive Maintenance - HematologyBem GarciaNo ratings yet
- Strömungssimulation in Der Motorentechnik Übung 5: MehrphasensimulationDocument42 pagesStrömungssimulation in Der Motorentechnik Übung 5: MehrphasensimulationAtef NazNo ratings yet
- Bac SC 2024 Mid Term 2Document2 pagesBac SC 2024 Mid Term 2البشير الجربوعيNo ratings yet
- Calorimetry Worksheet SolutionsDocument3 pagesCalorimetry Worksheet SolutionsLee Lhouine Kaidz II LirazanNo ratings yet
- Proofs You Need Not Be Able To Reproduce.: 3.1 Convergent SequencesDocument4 pagesProofs You Need Not Be Able To Reproduce.: 3.1 Convergent Sequenceslessinah mbeleNo ratings yet
- Calculation Exercise Settling WaterDocument10 pagesCalculation Exercise Settling Waterragil_hadiNo ratings yet
- Black Body RadiationDocument10 pagesBlack Body Radiationhandy moseyNo ratings yet
- FS 3301 - FS-Temperature SwitchDocument8 pagesFS 3301 - FS-Temperature SwitchBinu ManiNo ratings yet