
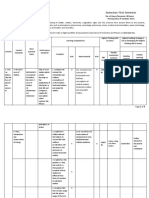
P3-Chapter 1 Basic Concepts
P3-Chapter 1 Basic Concepts
You might also like
- Quiz - Weekly Quiz 2 PDFDocument5 pagesQuiz - Weekly Quiz 2 PDFanswer2myqueries100% (1)
- Final Exam Question StaticDocument13 pagesFinal Exam Question StaticAsmadi Yussuf100% (1)
- Gheorghe MiculaDocument402 pagesGheorghe MiculaMavrodin ConstantinNo ratings yet
- HW13 SolnDocument4 pagesHW13 SolnShuchen ZhuNo ratings yet
- DH - Ch0 Introduction To Kinematics - 16x9 - Compatibility ModeDocument5 pagesDH - Ch0 Introduction To Kinematics - 16x9 - Compatibility ModeHậu VũNo ratings yet
- DH - ch0-2 IntroductionDocument5 pagesDH - ch0-2 IntroductionLinh Nguyễn TuấnNo ratings yet
- Biomechanics: Course Code: BME18R351 Gokul M - Ap/BmeDocument142 pagesBiomechanics: Course Code: BME18R351 Gokul M - Ap/BmeDHINESHKUMAR M BIOM-UG - 2019 BATCHNo ratings yet
- DH - ch0-1 IntroductionDocument3 pagesDH - ch0-1 IntroductionLinh Nguyễn TuấnNo ratings yet
- E Presentation Slides 01 ST WeekDocument54 pagesE Presentation Slides 01 ST WeekKevin AlexNo ratings yet
- Chap 1 FundamentalsDocument30 pagesChap 1 FundamentalssamuelNo ratings yet
- ME3026 Dynamics Chap1 2 Merged - RemovedDocument44 pagesME3026 Dynamics Chap1 2 Merged - RemovedNguyễn Nam AnhNo ratings yet
- Introduction To Finite Element MethodDocument202 pagesIntroduction To Finite Element MethodPrithviraj Daga80% (15)
- v6r2010 Introduction To KinematicsDocument80 pagesv6r2010 Introduction To KinematicsrlekmineNo ratings yet
- Dynamics Reviewer 1 2Document2 pagesDynamics Reviewer 1 2its.me.brader07No ratings yet
- Lecture 1Document68 pagesLecture 1Ama Serwaa YeboahNo ratings yet
- Din Mbs Skripta PredavanjaDocument48 pagesDin Mbs Skripta PredavanjaAnonymous Qshy1eNo ratings yet
- Ce224 Mechanics II DynamicsDocument3 pagesCe224 Mechanics II Dynamicsaysu arıkNo ratings yet
- Applied MechanicsDocument13 pagesApplied MechanicsAayush JhaNo ratings yet
- 1.physics - Introduction Mechanics - M.GevorgyanDocument16 pages1.physics - Introduction Mechanics - M.GevorgyanYuri PanosyanNo ratings yet
- 001.principle of StaticsDocument3 pages001.principle of StaticsCIELO OTADOYNo ratings yet
- 0 IntroDocument21 pages0 IntroyahyaNo ratings yet
- Module 1 2D DynamicsDocument5 pagesModule 1 2D DynamicsKind MuffinNo ratings yet
- Chapter - 1Document10 pagesChapter - 1VeeturiVarunNo ratings yet
- Engineeering Mechanics IntroductionDocument36 pagesEngineeering Mechanics IntroductionShad MuhammadNo ratings yet
- DYN-02 Kinetics of A ParticleDocument63 pagesDYN-02 Kinetics of A ParticleDo Thi My LeNo ratings yet
- DYN-02 Kinetics of a ParticleDocument63 pagesDYN-02 Kinetics of a ParticleDo Thi My LeNo ratings yet
- ME 305 Part 1 Fundamental Fluid and Flow PropertiesDocument11 pagesME 305 Part 1 Fundamental Fluid and Flow Propertiesblessing sNo ratings yet
- School of Engineering and TechnologyDocument3 pagesSchool of Engineering and Technologyankit mahtoNo ratings yet
- 1.1 Introduction To KinDinDocument27 pages1.1 Introduction To KinDinRio AlifNo ratings yet
- Continuum MechanicsDocument4 pagesContinuum Mechanicsdwarika2006No ratings yet
- 01 Introduction of Mechanics of Deformable Solids HCMUT 2022Document68 pages01 Introduction of Mechanics of Deformable Solids HCMUT 2022Bảo Tín TrầnNo ratings yet
- Finite ElementDocument900 pagesFinite ElementEmre EgribozNo ratings yet
- Computational Mechanics 01Document299 pagesComputational Mechanics 01AhmedNo ratings yet
- Mechanics of Material 1Document52 pagesMechanics of Material 1Law Jia WeiNo ratings yet
- LECTURE For Mechanical Engineer 1Document42 pagesLECTURE For Mechanical Engineer 1smuapnerNo ratings yet
- Final First Year Soe2018 and Syllabus-Cv2101Document1 pageFinal First Year Soe2018 and Syllabus-Cv2101name nameNo ratings yet
- EM MOD1-Ktunotes - inDocument37 pagesEM MOD1-Ktunotes - inIndra Pratap SengarNo ratings yet
- Grade: 11 Semester: First Semester: Culminating Performance StandardDocument4 pagesGrade: 11 Semester: First Semester: Culminating Performance StandardRochelle NonanNo ratings yet
- Intro Engineering MechanicsDocument1 pageIntro Engineering Mechanicssoufiane montassirNo ratings yet
- Module 1Document62 pagesModule 1Nazim ur rehmanNo ratings yet
- Mechanics: Introduction ToDocument11 pagesMechanics: Introduction ToBC EimorNo ratings yet
- Grade 9 Science Quarter 1Document3 pagesGrade 9 Science Quarter 1SciTeacher MadzNo ratings yet
- DERAIN, Precious G. Home Work# K21 COE0031 Statics of Rigid Bodies October 5, 2019Document3 pagesDERAIN, Precious G. Home Work# K21 COE0031 Statics of Rigid Bodies October 5, 2019Precious DerainNo ratings yet
- Engineering Mechanics: The Basic SequenceDocument20 pagesEngineering Mechanics: The Basic SequenceBojja JayaPrakashNo ratings yet
- Engineering-Mechanics Notes-1Document1 pageEngineering-Mechanics Notes-1Marius Ionut DiaconescuNo ratings yet
- Chapter 1. Introduction To DynamicsDocument24 pagesChapter 1. Introduction To Dynamicstom2003tnNo ratings yet
- Statics of Rigid Bodies: Course OutcomesDocument7 pagesStatics of Rigid Bodies: Course OutcomesAaron Jet AndresNo ratings yet
- Engineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicDocument5 pagesEngineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicKylle BedisNo ratings yet
- محاضرة 1Document3 pagesمحاضرة 1Karrar Al-khalidyNo ratings yet
- Course Plane-Mechanics3 Mec DeptDocument1 pageCourse Plane-Mechanics3 Mec DeptHassan El SayedNo ratings yet
- IFEM Ch01Document18 pagesIFEM Ch01Eng AlwardiNo ratings yet
- Engineering MechanicsDocument251 pagesEngineering MechanicsVinoth RengarajNo ratings yet
- STATICS OF RIGID BODIES Chapter IDocument23 pagesSTATICS OF RIGID BODIES Chapter IViron LucerianoNo ratings yet
- Engineering Mechanics: The Basic SequenceDocument22 pagesEngineering Mechanics: The Basic SequenceAbhiraj Singh SarnaNo ratings yet
- Esci 124N Engineering Mechanics Ii: Dynamics of Rigid BodiesDocument8 pagesEsci 124N Engineering Mechanics Ii: Dynamics of Rigid BodiesCrisostomo IbarraNo ratings yet
- Dyn1 PDFDocument24 pagesDyn1 PDFCarl Justin AzucenaNo ratings yet
- Fluid Mechanics: OutlineDocument8 pagesFluid Mechanics: OutlineJohn Carlo LisondatoNo ratings yet
- Physics Part Two Dictionary - Natural Science: Grow Your Vocabulary, #37From EverandPhysics Part Two Dictionary - Natural Science: Grow Your Vocabulary, #37No ratings yet
- Amssa Reliability GrowthDocument20 pagesAmssa Reliability Growthdhle100% (1)
- Stephen J Kressaty Resume Apr2011Document1 pageStephen J Kressaty Resume Apr2011Andrew WiseNo ratings yet
- 619-Article Text-2431-2-10-20221226Document7 pages619-Article Text-2431-2-10-20221226wawanNo ratings yet
- GATE EE 2006 With SolutionsDocument56 pagesGATE EE 2006 With Solutionspwnkumar63100% (1)
- General Mathematics - Grade 11 Alternative Delivery Mode Quarter 1 - Module 2: Rational Functions First Edition, 2020Document33 pagesGeneral Mathematics - Grade 11 Alternative Delivery Mode Quarter 1 - Module 2: Rational Functions First Edition, 2020Rolly Dominguez Balo100% (2)
- BEAMSCAN SW4-5-1 Man en 94813100 10Document592 pagesBEAMSCAN SW4-5-1 Man en 94813100 10Mohammad MehdikhaniNo ratings yet
- 2008 - Holographic Measurement of The 26 M HartRAO TelescopeDocument54 pages2008 - Holographic Measurement of The 26 M HartRAO Telescopezan wangNo ratings yet
- Civil Department - ANNA UNIVERSITY Important Question and Answers - Regulation 2013,2017 - STUDY MATERIAL, NotesDocument5 pagesCivil Department - ANNA UNIVERSITY Important Question and Answers - Regulation 2013,2017 - STUDY MATERIAL, NotesKali ThaashNo ratings yet
- MMS-Week6-Exercise5 Creating An OscilloscopeDocument9 pagesMMS-Week6-Exercise5 Creating An Oscilloscopesaujan126No ratings yet
- KISS Notes Moving AboutDocument41 pagesKISS Notes Moving AboutJenniferBackhus100% (8)
- AlphaDocument25 pagesAlphaOussama BOUDCHICHINo ratings yet
- Fourier Series LessonDocument41 pagesFourier Series Lessonjackson246No ratings yet
- 5 More About Polynomials: Review Exercise 5 (P. 5.5)Document47 pages5 More About Polynomials: Review Exercise 5 (P. 5.5)Eunice NgNo ratings yet
- Thermal Analysis of Natural Cooling Type Distribution Transformer Retrofilled With Natural Ester OilDocument9 pagesThermal Analysis of Natural Cooling Type Distribution Transformer Retrofilled With Natural Ester Oildayan_ghdNo ratings yet
- Course Outline Cc505Document5 pagesCourse Outline Cc505Adron LimNo ratings yet
- 07 - Convective Heat TransferDocument75 pages07 - Convective Heat TransferMerazka FaroukNo ratings yet
- Chapter 13Document33 pagesChapter 13Mustafa FarragNo ratings yet
- Test Review - Linearization and Approximation Circuit: FX A DX XDocument2 pagesTest Review - Linearization and Approximation Circuit: FX A DX Xyohan leeNo ratings yet
- Programming in CDocument132 pagesProgramming in CchandrasekarNo ratings yet
- Soil Biology & BiochemistryDocument16 pagesSoil Biology & BiochemistryINRAE - AGIR100% (1)
- Median Trajectories: Kevin Buchin Maarten Löffler Carola WenkDocument20 pagesMedian Trajectories: Kevin Buchin Maarten Löffler Carola WenkMartín CepedaNo ratings yet
- Capacitor CompensatorDocument7 pagesCapacitor Compensatorranjith120198No ratings yet
- Grade 8 February 12 - 16 2018Document3 pagesGrade 8 February 12 - 16 2018LAWRENCE MALLARINo ratings yet
- Paper 2 With Ans MathematicsDocument7 pagesPaper 2 With Ans MathematicsSwethank Element119No ratings yet
- Tuks Electrical EngineeringDocument26 pagesTuks Electrical EngineeringLoL BroNo ratings yet
- Al-Mahdi High Mathematics 11 - Grade Name: - . - . - . - . - Derivatives W.S-4Document4 pagesAl-Mahdi High Mathematics 11 - Grade Name: - . - . - . - . - Derivatives W.S-4api-253679034No ratings yet
























































































Download as pdf or txt
You might also like
- Quiz - Weekly Quiz 2 PDFDocument5 pagesQuiz - Weekly Quiz 2 PDFanswer2myqueries100% (1)
- Final Exam Question StaticDocument13 pagesFinal Exam Question StaticAsmadi Yussuf100% (1)
- Gheorghe MiculaDocument402 pagesGheorghe MiculaMavrodin ConstantinNo ratings yet
- HW13 SolnDocument4 pagesHW13 SolnShuchen ZhuNo ratings yet
- DH - Ch0 Introduction To Kinematics - 16x9 - Compatibility ModeDocument5 pagesDH - Ch0 Introduction To Kinematics - 16x9 - Compatibility ModeHậu VũNo ratings yet
- DH - ch0-2 IntroductionDocument5 pagesDH - ch0-2 IntroductionLinh Nguyễn TuấnNo ratings yet
- Biomechanics: Course Code: BME18R351 Gokul M - Ap/BmeDocument142 pagesBiomechanics: Course Code: BME18R351 Gokul M - Ap/BmeDHINESHKUMAR M BIOM-UG - 2019 BATCHNo ratings yet
- DH - ch0-1 IntroductionDocument3 pagesDH - ch0-1 IntroductionLinh Nguyễn TuấnNo ratings yet
- E Presentation Slides 01 ST WeekDocument54 pagesE Presentation Slides 01 ST WeekKevin AlexNo ratings yet
- Chap 1 FundamentalsDocument30 pagesChap 1 FundamentalssamuelNo ratings yet
- ME3026 Dynamics Chap1 2 Merged - RemovedDocument44 pagesME3026 Dynamics Chap1 2 Merged - RemovedNguyễn Nam AnhNo ratings yet
- Introduction To Finite Element MethodDocument202 pagesIntroduction To Finite Element MethodPrithviraj Daga80% (15)
- v6r2010 Introduction To KinematicsDocument80 pagesv6r2010 Introduction To KinematicsrlekmineNo ratings yet
- Dynamics Reviewer 1 2Document2 pagesDynamics Reviewer 1 2its.me.brader07No ratings yet
- Lecture 1Document68 pagesLecture 1Ama Serwaa YeboahNo ratings yet
- Din Mbs Skripta PredavanjaDocument48 pagesDin Mbs Skripta PredavanjaAnonymous Qshy1eNo ratings yet
- Ce224 Mechanics II DynamicsDocument3 pagesCe224 Mechanics II Dynamicsaysu arıkNo ratings yet
- Applied MechanicsDocument13 pagesApplied MechanicsAayush JhaNo ratings yet
- 1.physics - Introduction Mechanics - M.GevorgyanDocument16 pages1.physics - Introduction Mechanics - M.GevorgyanYuri PanosyanNo ratings yet
- 001.principle of StaticsDocument3 pages001.principle of StaticsCIELO OTADOYNo ratings yet
- 0 IntroDocument21 pages0 IntroyahyaNo ratings yet
- Module 1 2D DynamicsDocument5 pagesModule 1 2D DynamicsKind MuffinNo ratings yet
- Chapter - 1Document10 pagesChapter - 1VeeturiVarunNo ratings yet
- Engineeering Mechanics IntroductionDocument36 pagesEngineeering Mechanics IntroductionShad MuhammadNo ratings yet
- DYN-02 Kinetics of A ParticleDocument63 pagesDYN-02 Kinetics of A ParticleDo Thi My LeNo ratings yet
- DYN-02 Kinetics of a ParticleDocument63 pagesDYN-02 Kinetics of a ParticleDo Thi My LeNo ratings yet
- ME 305 Part 1 Fundamental Fluid and Flow PropertiesDocument11 pagesME 305 Part 1 Fundamental Fluid and Flow Propertiesblessing sNo ratings yet
- School of Engineering and TechnologyDocument3 pagesSchool of Engineering and Technologyankit mahtoNo ratings yet
- 1.1 Introduction To KinDinDocument27 pages1.1 Introduction To KinDinRio AlifNo ratings yet
- Continuum MechanicsDocument4 pagesContinuum Mechanicsdwarika2006No ratings yet
- 01 Introduction of Mechanics of Deformable Solids HCMUT 2022Document68 pages01 Introduction of Mechanics of Deformable Solids HCMUT 2022Bảo Tín TrầnNo ratings yet
- Finite ElementDocument900 pagesFinite ElementEmre EgribozNo ratings yet
- Computational Mechanics 01Document299 pagesComputational Mechanics 01AhmedNo ratings yet
- Mechanics of Material 1Document52 pagesMechanics of Material 1Law Jia WeiNo ratings yet
- LECTURE For Mechanical Engineer 1Document42 pagesLECTURE For Mechanical Engineer 1smuapnerNo ratings yet
- Final First Year Soe2018 and Syllabus-Cv2101Document1 pageFinal First Year Soe2018 and Syllabus-Cv2101name nameNo ratings yet
- EM MOD1-Ktunotes - inDocument37 pagesEM MOD1-Ktunotes - inIndra Pratap SengarNo ratings yet
- Grade: 11 Semester: First Semester: Culminating Performance StandardDocument4 pagesGrade: 11 Semester: First Semester: Culminating Performance StandardRochelle NonanNo ratings yet
- Intro Engineering MechanicsDocument1 pageIntro Engineering Mechanicssoufiane montassirNo ratings yet
- Module 1Document62 pagesModule 1Nazim ur rehmanNo ratings yet
- Mechanics: Introduction ToDocument11 pagesMechanics: Introduction ToBC EimorNo ratings yet
- Grade 9 Science Quarter 1Document3 pagesGrade 9 Science Quarter 1SciTeacher MadzNo ratings yet
- DERAIN, Precious G. Home Work# K21 COE0031 Statics of Rigid Bodies October 5, 2019Document3 pagesDERAIN, Precious G. Home Work# K21 COE0031 Statics of Rigid Bodies October 5, 2019Precious DerainNo ratings yet
- Engineering Mechanics: The Basic SequenceDocument20 pagesEngineering Mechanics: The Basic SequenceBojja JayaPrakashNo ratings yet
- Engineering-Mechanics Notes-1Document1 pageEngineering-Mechanics Notes-1Marius Ionut DiaconescuNo ratings yet
- Chapter 1. Introduction To DynamicsDocument24 pagesChapter 1. Introduction To Dynamicstom2003tnNo ratings yet
- Statics of Rigid Bodies: Course OutcomesDocument7 pagesStatics of Rigid Bodies: Course OutcomesAaron Jet AndresNo ratings yet
- Engineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicDocument5 pagesEngineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicKylle BedisNo ratings yet
- محاضرة 1Document3 pagesمحاضرة 1Karrar Al-khalidyNo ratings yet
- Course Plane-Mechanics3 Mec DeptDocument1 pageCourse Plane-Mechanics3 Mec DeptHassan El SayedNo ratings yet
- IFEM Ch01Document18 pagesIFEM Ch01Eng AlwardiNo ratings yet
- Engineering MechanicsDocument251 pagesEngineering MechanicsVinoth RengarajNo ratings yet
- STATICS OF RIGID BODIES Chapter IDocument23 pagesSTATICS OF RIGID BODIES Chapter IViron LucerianoNo ratings yet
- Engineering Mechanics: The Basic SequenceDocument22 pagesEngineering Mechanics: The Basic SequenceAbhiraj Singh SarnaNo ratings yet
- Esci 124N Engineering Mechanics Ii: Dynamics of Rigid BodiesDocument8 pagesEsci 124N Engineering Mechanics Ii: Dynamics of Rigid BodiesCrisostomo IbarraNo ratings yet
- Dyn1 PDFDocument24 pagesDyn1 PDFCarl Justin AzucenaNo ratings yet
- Fluid Mechanics: OutlineDocument8 pagesFluid Mechanics: OutlineJohn Carlo LisondatoNo ratings yet
- Physics Part Two Dictionary - Natural Science: Grow Your Vocabulary, #37From EverandPhysics Part Two Dictionary - Natural Science: Grow Your Vocabulary, #37No ratings yet
- Amssa Reliability GrowthDocument20 pagesAmssa Reliability Growthdhle100% (1)
- Stephen J Kressaty Resume Apr2011Document1 pageStephen J Kressaty Resume Apr2011Andrew WiseNo ratings yet
- 619-Article Text-2431-2-10-20221226Document7 pages619-Article Text-2431-2-10-20221226wawanNo ratings yet
- GATE EE 2006 With SolutionsDocument56 pagesGATE EE 2006 With Solutionspwnkumar63100% (1)
- General Mathematics - Grade 11 Alternative Delivery Mode Quarter 1 - Module 2: Rational Functions First Edition, 2020Document33 pagesGeneral Mathematics - Grade 11 Alternative Delivery Mode Quarter 1 - Module 2: Rational Functions First Edition, 2020Rolly Dominguez Balo100% (2)
- BEAMSCAN SW4-5-1 Man en 94813100 10Document592 pagesBEAMSCAN SW4-5-1 Man en 94813100 10Mohammad MehdikhaniNo ratings yet
- 2008 - Holographic Measurement of The 26 M HartRAO TelescopeDocument54 pages2008 - Holographic Measurement of The 26 M HartRAO Telescopezan wangNo ratings yet
- Civil Department - ANNA UNIVERSITY Important Question and Answers - Regulation 2013,2017 - STUDY MATERIAL, NotesDocument5 pagesCivil Department - ANNA UNIVERSITY Important Question and Answers - Regulation 2013,2017 - STUDY MATERIAL, NotesKali ThaashNo ratings yet
- MMS-Week6-Exercise5 Creating An OscilloscopeDocument9 pagesMMS-Week6-Exercise5 Creating An Oscilloscopesaujan126No ratings yet
- KISS Notes Moving AboutDocument41 pagesKISS Notes Moving AboutJenniferBackhus100% (8)
- AlphaDocument25 pagesAlphaOussama BOUDCHICHINo ratings yet
- Fourier Series LessonDocument41 pagesFourier Series Lessonjackson246No ratings yet
- 5 More About Polynomials: Review Exercise 5 (P. 5.5)Document47 pages5 More About Polynomials: Review Exercise 5 (P. 5.5)Eunice NgNo ratings yet
- Thermal Analysis of Natural Cooling Type Distribution Transformer Retrofilled With Natural Ester OilDocument9 pagesThermal Analysis of Natural Cooling Type Distribution Transformer Retrofilled With Natural Ester Oildayan_ghdNo ratings yet
- Course Outline Cc505Document5 pagesCourse Outline Cc505Adron LimNo ratings yet
- 07 - Convective Heat TransferDocument75 pages07 - Convective Heat TransferMerazka FaroukNo ratings yet
- Chapter 13Document33 pagesChapter 13Mustafa FarragNo ratings yet
- Test Review - Linearization and Approximation Circuit: FX A DX XDocument2 pagesTest Review - Linearization and Approximation Circuit: FX A DX Xyohan leeNo ratings yet
- Programming in CDocument132 pagesProgramming in CchandrasekarNo ratings yet
- Soil Biology & BiochemistryDocument16 pagesSoil Biology & BiochemistryINRAE - AGIR100% (1)
- Median Trajectories: Kevin Buchin Maarten Löffler Carola WenkDocument20 pagesMedian Trajectories: Kevin Buchin Maarten Löffler Carola WenkMartín CepedaNo ratings yet
- Capacitor CompensatorDocument7 pagesCapacitor Compensatorranjith120198No ratings yet
- Grade 8 February 12 - 16 2018Document3 pagesGrade 8 February 12 - 16 2018LAWRENCE MALLARINo ratings yet
- Paper 2 With Ans MathematicsDocument7 pagesPaper 2 With Ans MathematicsSwethank Element119No ratings yet
- Tuks Electrical EngineeringDocument26 pagesTuks Electrical EngineeringLoL BroNo ratings yet
- Al-Mahdi High Mathematics 11 - Grade Name: - . - . - . - . - Derivatives W.S-4Document4 pagesAl-Mahdi High Mathematics 11 - Grade Name: - . - . - . - . - Derivatives W.S-4api-253679034No ratings yet