Download as pdf or txt
You might also like
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Trilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsFrom EverandTrilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsNo ratings yet
- Sensors and Transducers: Mechatronics - Unit 1, Chapter 2Document41 pagesSensors and Transducers: Mechatronics - Unit 1, Chapter 2Vinay KNo ratings yet
- Sensors and ActuatorsDocument2 pagesSensors and Actuatorssrinivasan govindarajan100% (1)
- 2 Sensors and TransducersDocument83 pages2 Sensors and TransducersJEYAVEL PALANISAMYNo ratings yet
- OIE 751 ROBOTICS Unit 3 Class 3 (14-9-2020)Document10 pagesOIE 751 ROBOTICS Unit 3 Class 3 (14-9-2020)MICHEL RAJNo ratings yet
- Oa1-Two MarksDocument28 pagesOa1-Two MarksMEIVELJ 19EE025No ratings yet
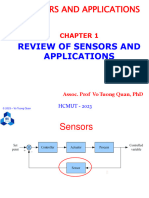
- Chapter 1 - Review of Sensors and ApplicationsDocument116 pagesChapter 1 - Review of Sensors and ApplicationsMinh Lê Nguyễn QuangNo ratings yet
- Rob17 Sensors HandoutDocument98 pagesRob17 Sensors HandoutHema C.R.No ratings yet
- 4 Sensor Communication DesignDocument60 pages4 Sensor Communication DesignAdam AndualemNo ratings yet
- Module 1Document102 pagesModule 1Arun ShalNo ratings yet
- VMKV Engineering College, Salem Aeronautical Engineering CourseDocument32 pagesVMKV Engineering College, Salem Aeronautical Engineering CourseGaurav MullickNo ratings yet
- Sensors and TransducersDocument87 pagesSensors and Transducersdanilopangatungan8No ratings yet
- Assignment New 1 17102023 012401pmDocument2 pagesAssignment New 1 17102023 012401pmvaneeza ahmedNo ratings yet
- 15ecc18 - Sensors and ActuatorsDocument1 page15ecc18 - Sensors and Actuatorskamarajme2006No ratings yet
- ComparatorsDocument16 pagesComparatorsShreyas BhatNo ratings yet
- Instrumentation and Measurement: Lesson PlanDocument56 pagesInstrumentation and Measurement: Lesson PlanDanishNo ratings yet
- Module 4 PDFDocument33 pagesModule 4 PDFRachnaNo ratings yet
- Mechatronics Engineering: Unit 2Document34 pagesMechatronics Engineering: Unit 2m.m.e m.m.eNo ratings yet
- Transducer and SensorDocument92 pagesTransducer and SensorFemi PrinceNo ratings yet
- Sensors AND Machine VisionDocument78 pagesSensors AND Machine VisionbabuNo ratings yet
- Sensors For CE Aplli.Document3 pagesSensors For CE Aplli.sanjusamsonNo ratings yet
- Title: Different Types of Sensors Date: 07/04/2020 Name of Faculty: Mr. Ankit P. Solanki Lecture No: (04) 12:30 To 01:30Document15 pagesTitle: Different Types of Sensors Date: 07/04/2020 Name of Faculty: Mr. Ankit P. Solanki Lecture No: (04) 12:30 To 01:30mohammedalesay47No ratings yet
- RoboticsDocument17 pagesRoboticsNurmi Elisya RosliNo ratings yet
- Technical Data Sheet: OPTISOUND 3010 C - 3030 C Ultrasonic Level GaugeDocument25 pagesTechnical Data Sheet: OPTISOUND 3010 C - 3030 C Ultrasonic Level Gaugedaniel romeroNo ratings yet
- Baumer Catalogue-Ultrasonic CT EN 1305 11106734Document132 pagesBaumer Catalogue-Ultrasonic CT EN 1305 11106734Jarielson SantanaNo ratings yet
- Iare Ece Vi-Emi Emi-Lecture Notes-Word NewDocument185 pagesIare Ece Vi-Emi Emi-Lecture Notes-Word NewSiva KumarNo ratings yet
- EMI - Lab - Report 7, 146, 106Document7 pagesEMI - Lab - Report 7, 146, 106Souban JavedNo ratings yet
- MENG2009 Lecture 2 11-12 S1 Position MeasurementDocument89 pagesMENG2009 Lecture 2 11-12 S1 Position Measurementxl.hall95No ratings yet
- Sensors and ActuatorsDocument109 pagesSensors and ActuatorsDr-Amit Kumar Singh100% (2)
- Ap4073 Sensors and Actuators L T P CDocument1 pageAp4073 Sensors and Actuators L T P Cjames R100% (1)
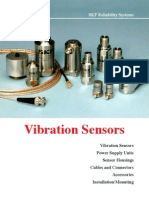
- Vibration Sensors. SKF Condition MonitoringDocument44 pagesVibration Sensors. SKF Condition MonitoringEduardo CastilloNo ratings yet
- Sensors NotesDocument4 pagesSensors Notesvijkrsna100% (2)
- Lecture 6 Sensors and Its TypesDocument19 pagesLecture 6 Sensors and Its TypesMuhammad Abdullah YounasNo ratings yet
- Robotics Unit3 SensorsDocument120 pagesRobotics Unit3 SensorsJanarthanan BalakrishnasamyNo ratings yet
- W Defa4949Document24 pagesW Defa4949sanjozi89No ratings yet
- Lecture 10, 11 12 - Sensors For Robots PDFDocument65 pagesLecture 10, 11 12 - Sensors For Robots PDFAJENANo ratings yet
- DAQ Lec3Document30 pagesDAQ Lec3AbdelRahman MahmoudNo ratings yet
- Basic SensorsDocument11 pagesBasic SensorsShreyash ButleNo ratings yet
- Unit 1 - ASVDocument24 pagesUnit 1 - ASVAnup S. Vibhute DITNo ratings yet
- Meca 2Document16 pagesMeca 2Hussien KafafyNo ratings yet
- Vibration Sensors - SKFDocument44 pagesVibration Sensors - SKFnekoNcen100% (1)
- Solid State SensorsDocument39 pagesSolid State SensorsRona Mae Raza RecaldeNo ratings yet
- F02 Sensors Signalconditioning Tmms04Document21 pagesF02 Sensors Signalconditioning Tmms04Endalk SimegnNo ratings yet
- M&i 2m - Opt PDFDocument0 pagesM&i 2m - Opt PDFvjnrkzNo ratings yet
- 06 Chapter+6 SensorsDocument92 pages06 Chapter+6 Sensorsபுருஷோத்தமன் ரவீந்திரன்No ratings yet
- Ap5101 SensorsDocument1 pageAp5101 SensorsJasmine KNo ratings yet
- Unit 1 - Basic Instrumentation and Measurement Techniques PPT Notes Material For Sem II Uploaded by Navdeep RaghavDocument144 pagesUnit 1 - Basic Instrumentation and Measurement Techniques PPT Notes Material For Sem II Uploaded by Navdeep Raghavavikool1708No ratings yet
- OIE 751 ROBOTICS Unit 3 Class 8 (30-10-2020)Document14 pagesOIE 751 ROBOTICS Unit 3 Class 8 (30-10-2020)MICHEL RAJNo ratings yet
- L3 - Introduction To SensorsDocument57 pagesL3 - Introduction To SensorsSana DINo ratings yet
- Unit-1 Sensors Part-1Document30 pagesUnit-1 Sensors Part-117 CSE Lokesh VNo ratings yet
- Vibration SensorsDocument44 pagesVibration SensorsLarry Vilca DelgadoNo ratings yet
- Lecture Note 4 - Resistant Element Based SensorDocument30 pagesLecture Note 4 - Resistant Element Based SensorNgọc HiểuNo ratings yet
- 1 TH Sensors NotesDocument13 pages1 TH Sensors NotesBGM lyricsNo ratings yet
- Chapter 4.0 Sensor and Signal CondDocument49 pagesChapter 4.0 Sensor and Signal CondmathewosNo ratings yet
- SensorsDocument17 pagesSensorsDaystar YtNo ratings yet
- Ch.06 Feedback Linearization - Problem 2Document2 pagesCh.06 Feedback Linearization - Problem 2toanNo ratings yet
- Ch.06 Feedback Linearization - Problem 3Document13 pagesCh.06 Feedback Linearization - Problem 3toanNo ratings yet
- Unit 3 Data Exploration (P)Document69 pagesUnit 3 Data Exploration (P)toanNo ratings yet
- Unit 4 ClassificationDocument73 pagesUnit 4 ClassificationtoanNo ratings yet
- Ch.06 Feedback Linearization - Problem 1Document3 pagesCh.06 Feedback Linearization - Problem 1toanNo ratings yet
- Chapter - Gear ModellingDocument34 pagesChapter - Gear ModellingtoanNo ratings yet
- Unit 2 Data Science Process (P)Document24 pagesUnit 2 Data Science Process (P)toanNo ratings yet
- Ch.02 Phase Plane AnalysisDocument7 pagesCh.02 Phase Plane AnalysistoanNo ratings yet
- Chapter - Review DynamicsDocument19 pagesChapter - Review DynamicstoanNo ratings yet
- Ch.03 Fundamentals of Lyapunov TheoryDocument11 pagesCh.03 Fundamentals of Lyapunov TheorytoanNo ratings yet
- 1 3 Transmission Line Design Standard Rev 2Document12 pages1 3 Transmission Line Design Standard Rev 2Malik malikNo ratings yet
- SU60 Data SheetDocument1 pageSU60 Data SheetSamuel OdeiaddoNo ratings yet
- EE42E PLate 3Document10 pagesEE42E PLate 3Niño John JaymeNo ratings yet
- JEE Main Previous Year Papers Questions With Solutions Physics Current ElectricityDocument79 pagesJEE Main Previous Year Papers Questions With Solutions Physics Current ElectricityAditya KothariNo ratings yet
- Acoustical Properties of Building MaterialsDocument29 pagesAcoustical Properties of Building MaterialsJackielyn AbasNo ratings yet
- Absorption Enhancement by Light Scattering For SolarDocument109 pagesAbsorption Enhancement by Light Scattering For SolarChristopher PostigoNo ratings yet
- Bridgeless AC-DC Buck-Boost Converter WithDocument5 pagesBridgeless AC-DC Buck-Boost Converter WithJishnu VenugopalNo ratings yet
- 3PS - Test 2 - 2021 - QuestionDocument2 pages3PS - Test 2 - 2021 - QuestionMandlenkosi GumedeNo ratings yet
- Electric CircuitsDocument14 pagesElectric CircuitsPreet BassiNo ratings yet
- Electrical Engineering: Power ElectronicsDocument13 pagesElectrical Engineering: Power ElectronicsSaif UddinNo ratings yet
- Physics For Information Science - Lecture Notes, Study Material and Important Questions, AnswersDocument6 pagesPhysics For Information Science - Lecture Notes, Study Material and Important Questions, AnswersM.V. TV100% (1)
- 3.interaction of Radiation With MatterDocument42 pages3.interaction of Radiation With Matterwajira sanjaya pereraNo ratings yet
- Datasheet-Prevectron 3 S60Document1 pageDatasheet-Prevectron 3 S60Sandeep VijayakumarNo ratings yet
- EEE2407 03 Sensors& TransducersDocument20 pagesEEE2407 03 Sensors& TransducersErick OderoNo ratings yet
- Master Saarinen Tapio 2019Document67 pagesMaster Saarinen Tapio 2019suresh sangamNo ratings yet
- Lab 2 Simple Electric CircuitsDocument10 pagesLab 2 Simple Electric Circuitsjodyanne ubaldeNo ratings yet
- Graph B/W Torque & Rotor SpeedDocument2 pagesGraph B/W Torque & Rotor Speedraees ahmadNo ratings yet
- Long Slot Array For Wireless Power Transmission: Mauro Ettorre, Waleed A. Alomar, Anthony GrbicDocument2 pagesLong Slot Array For Wireless Power Transmission: Mauro Ettorre, Waleed A. Alomar, Anthony GrbichosseinNo ratings yet
- Bce1603365386047 1 PDFDocument860 pagesBce1603365386047 1 PDFvamsi karnaNo ratings yet
- Case Study On EsdDocument8 pagesCase Study On EsdRahul Anand K MNo ratings yet
- Resistors in Series and Parallel Circuits: ObjectiveDocument4 pagesResistors in Series and Parallel Circuits: ObjectiveAbdul NasefNo ratings yet
- ADDRESS: Ecopark, Brgy. Muzon, CSJDM, Bulacan CONTACT DETAILS: 044-3076932Document6 pagesADDRESS: Ecopark, Brgy. Muzon, CSJDM, Bulacan CONTACT DETAILS: 044-3076932Danica ApeladoNo ratings yet
- Vedantu Physics Formula SheetDocument39 pagesVedantu Physics Formula SheetNARENDRAN S100% (1)
- Winding Efficiency and CalculationDocument16 pagesWinding Efficiency and CalculationTanzila NusratNo ratings yet
- ESE PaperDocument13 pagesESE PaperNikhil GaidhaneNo ratings yet
- Basic Definitions 2 Principles of Photometry 3 Lummer - Brodhun Photometer 4 ProblemsDocument34 pagesBasic Definitions 2 Principles of Photometry 3 Lummer - Brodhun Photometer 4 Problemsahsan shahNo ratings yet
- Distribution PanelDocument5 pagesDistribution PanelSourav RanaNo ratings yet
- AMP Test Specifications Vs EIA and IEC Test MethodsDocument9 pagesAMP Test Specifications Vs EIA and IEC Test MethodstrebeardNo ratings yet
- AD8221 - Analog Devices PDFDocument21 pagesAD8221 - Analog Devices PDFVinicius Mastelaro RodriguesNo ratings yet
- Task 2 - Electromagnetic Waves in Bounded Open Media: Exercises DevelopmentDocument9 pagesTask 2 - Electromagnetic Waves in Bounded Open Media: Exercises Developmentjavierone xporNo ratings yet