Download as pdf or txt
You might also like
- July 23, 2009 Through August 24, 2009 JPMorgan Chase BankDocument4 pagesJuly 23, 2009 Through August 24, 2009 JPMorgan Chase BankMaria Blackburn33% (3)
- Kavo Instruction ManualDocument107 pagesKavo Instruction ManualSwami Meera100% (4)
- CASINO by Nicholas PileggiDocument238 pagesCASINO by Nicholas PileggiPutipufNo ratings yet
- IVPS-IVPM ManualDocument16 pagesIVPS-IVPM Manualpeter100% (3)
- Starting Guide For G11S-UDP Synchronous Motor Software: Date - Revision 14/12/05 - 4Document12 pagesStarting Guide For G11S-UDP Synchronous Motor Software: Date - Revision 14/12/05 - 4freddy garciaNo ratings yet
- Soft Starter Wiring Diagram PDFDocument4 pagesSoft Starter Wiring Diagram PDFEdwin Cob GuriNo ratings yet
- QAx40 Electrical ManualDocument17 pagesQAx40 Electrical ManualGerald Martin100% (2)
- A5268 3A, 28V, 340Khz Synchronous Rectified Step-Down ConverterDocument16 pagesA5268 3A, 28V, 340Khz Synchronous Rectified Step-Down ConverterAnderson Galarza CalderonNo ratings yet
- Masterdrives Single Line DiagramsDocument32 pagesMasterdrives Single Line DiagramsrodrigomessiasNo ratings yet
- Governor DrawingDocument6 pagesGovernor DrawingPratikTiwariNo ratings yet
- Phase Control Circuit-Load Current Feedback Applications: DescriptionDocument13 pagesPhase Control Circuit-Load Current Feedback Applications: DescriptionjuankiguaNo ratings yet
- Dual Mic Pre Schematic - SSM2017-Based, But INA217 & THAT1510 Are Possible Subs - Kevin Ross Celestial - ComauDocument1 pageDual Mic Pre Schematic - SSM2017-Based, But INA217 & THAT1510 Are Possible Subs - Kevin Ross Celestial - ComaucrackintheshatNo ratings yet
- NCP1396A, NCP1396B Controller, High Performance Resonant Mode, With High and Low Side DriversDocument26 pagesNCP1396A, NCP1396B Controller, High Performance Resonant Mode, With High and Low Side DriversMaria VaccarielloNo ratings yet
- Example of Connection To Machine Controller MP2¡¡¡Document8 pagesExample of Connection To Machine Controller MP2¡¡¡Đạt Trương TuấnNo ratings yet
- Zero-Voltage Switch With Adjustable Ramp T2117: FeaturesDocument15 pagesZero-Voltage Switch With Adjustable Ramp T2117: FeaturesNenad VukovicNo ratings yet
- Varmeca 30Document68 pagesVarmeca 30Ku BonNo ratings yet
- FVD Englishcatalog 20220922Document6 pagesFVD Englishcatalog 20220922NATHANEASTBOUNDNo ratings yet
- T2117 Zero-Voltage Switch With Adjustable Ramp PDFDocument16 pagesT2117 Zero-Voltage Switch With Adjustable Ramp PDFnenadNo ratings yet
- Ep100 ManualDocument20 pagesEp100 Manualhang100% (1)
- OLV1 (Edit Mode)Document1 pageOLV1 (Edit Mode)ING_MBMNo ratings yet
- 1310 FsDocument12 pages1310 FsMohamed HaddadNo ratings yet
- KBVF 13Document44 pagesKBVF 13DamianHerreraNo ratings yet
- Wiring Diagram For Soft Starters in Motor Control Centers: Technical Data TD03900001EDocument4 pagesWiring Diagram For Soft Starters in Motor Control Centers: Technical Data TD03900001EHazem HassonNo ratings yet
- Antenna Terminal Control Unit: 1 2 3 Can H GND +15V SHLD 1 2 3 SHLD 15V+ GND Can H Can LDocument1 pageAntenna Terminal Control Unit: 1 2 3 Can H GND +15V SHLD 1 2 3 SHLD 15V+ GND Can H Can LlyonanimeNo ratings yet
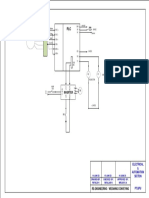
- Wiring Weighing Conveyor BpuDocument1 pageWiring Weighing Conveyor BpubayuNo ratings yet
- VAV - Heater - 1PH Scheme Drawing.Document1 pageVAV - Heater - 1PH Scheme Drawing.Alaguraja SubramanianNo ratings yet
- DFL 3000aDocument28 pagesDFL 3000aAndrei Zamfir100% (1)
- Contact Block EatonDocument2 pagesContact Block EatonsydifiaNo ratings yet
- Manual J1000Document6 pagesManual J1000Jose Luis MendozaNo ratings yet
- Wiring Instalasi Dan Prosedur Pemasangan Lock BypassDocument1 pageWiring Instalasi Dan Prosedur Pemasangan Lock BypassdadangNo ratings yet
- Wiring Diagram V6Document1 pageWiring Diagram V6rock6hard7No ratings yet
- PMSMDocument6 pagesPMSMChacho ChocosNo ratings yet
- Dual Driver v2Document5 pagesDual Driver v2Jorge JuniorNo ratings yet
- Pcs TCM 2800 - 200Document1 pagePcs TCM 2800 - 200Garrett AinsworthNo ratings yet
- Thyssenkrupp System Engineering S/A Upper Liners To BlockDocument64 pagesThyssenkrupp System Engineering S/A Upper Liners To BlockManjunathNo ratings yet
- Features Descriptio: LT1080/LT1081 Advanced Low Power 5V RS232 Dual Driver/ReceiverDocument13 pagesFeatures Descriptio: LT1080/LT1081 Advanced Low Power 5V RS232 Dual Driver/ReceiverahmedNo ratings yet
- MOVIDRIVE MDX60B 61B Operating Instructions SNPDocument3 pagesMOVIDRIVE MDX60B 61B Operating Instructions SNPApinat ChaisriNo ratings yet
- TR310H InformationDocument2 pagesTR310H InformationRodrigoNo ratings yet
- 220 V Encoder: Kabel Power SupplyDocument1 page220 V Encoder: Kabel Power Supplylukmanul hakimNo ratings yet
- 12 Volt Variable Dual Power Supply ProjectDocument7 pages12 Volt Variable Dual Power Supply ProjectSpeech's Club100% (1)
- HT-8 Panel Drawi̇ngDocument28 pagesHT-8 Panel Drawi̇ngminhasranaNo ratings yet
- Data Sheet: Part No. Package Code No. HSOP056-P-0300ADocument32 pagesData Sheet: Part No. Package Code No. HSOP056-P-0300Aความรักยิ่งใหญ่ เหนือสิ่งอื่นใดNo ratings yet
- SJ To Dyonics Power InterfaceDocument1 pageSJ To Dyonics Power Interfacem_brodskyNo ratings yet
- M1200 PinoutDocument2 pagesM1200 PinoutRaviVelugulaNo ratings yet
- Clap SwitchDocument1 pageClap SwitchSaravana_Kumar_4984No ratings yet
- WIRING TA Final FixDocument1 pageWIRING TA Final FixAji Tyas PrakosoNo ratings yet
- Stepper Motor Driver MC3479: ON SemiconductorDocument12 pagesStepper Motor Driver MC3479: ON SemiconductornudufoqiNo ratings yet
- Switching Regulator Allows Alkalines To Replace Nicads: Design Note 41 Brian HuffmanDocument2 pagesSwitching Regulator Allows Alkalines To Replace Nicads: Design Note 41 Brian HuffmanВячеслав ГлушакNo ratings yet
- Gps JammerDocument1 pageGps Jammer9cf634095aNo ratings yet
- Fan Coil Room Thermostat RDF510, RDF530 : en ZHDocument2 pagesFan Coil Room Thermostat RDF510, RDF530 : en ZHمحمد عليNo ratings yet
- U209B M AtmelDocument19 pagesU209B M Atmelyassine yassineNo ratings yet
- Tu510a enDocument28 pagesTu510a enmenale libayeNo ratings yet
- Robot Schematic PDFDocument1 pageRobot Schematic PDFSaad Imran δδNo ratings yet
- 230TAIYO DST 162 V1 - 0 AppendixDocument8 pages230TAIYO DST 162 V1 - 0 AppendixTamNo ratings yet
- Mainboard RSAG7.820.4302 2010Document10 pagesMainboard RSAG7.820.4302 2010pedroNo ratings yet
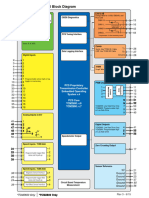
- Blok DracDocument1 pageBlok DracAl KaNo ratings yet
- Catalogo inversorHNC hv390 PolicompDocument8 pagesCatalogo inversorHNC hv390 PolicompRodrigo OrfeiNo ratings yet
- Catálogo de Convertidores de Frecuencia de La Serie HV390Document9 pagesCatálogo de Convertidores de Frecuencia de La Serie HV390Nancy GutiNo ratings yet
- Autonics ABS Relay TerminalDocument7 pagesAutonics ABS Relay Terminalkurniawan sudarmonoNo ratings yet
- QRP Z Match 40 10m Iss 1 3Document4 pagesQRP Z Match 40 10m Iss 1 3AdrianPleatăNo ratings yet
- NSSBCHM Activity 16 LabDocument4 pagesNSSBCHM Activity 16 Labsad asdNo ratings yet
- Alpine Air Classic XL 15 ManualDocument12 pagesAlpine Air Classic XL 15 Manualguitarmman60643No ratings yet
- INDIA Gherkin enDocument6 pagesINDIA Gherkin enmichelbgggNo ratings yet
- QuadEquations PPT Alg2Document16 pagesQuadEquations PPT Alg2Kenny Ann Grace BatiancilaNo ratings yet
- Cost Audit RepairDocument7 pagesCost Audit RepairkayseNo ratings yet
- Soalan Psikologi Pengujian Dan PengukuranDocument11 pagesSoalan Psikologi Pengujian Dan PengukuranmisxcheaNo ratings yet
- Low-Cost Arrival Assistance Service Vietnam AirportDocument9 pagesLow-Cost Arrival Assistance Service Vietnam AirportvietnamfasttrackserviceNo ratings yet
- 9286 Ds Opsycom PFPDocument2 pages9286 Ds Opsycom PFPamir11601No ratings yet
- Signals and System PDFDocument38 pagesSignals and System PDFdeepakNo ratings yet
- The Mechanical Properties of Polypropylene - Polylactic Acid (PP-PLA) Polymer Blends - 24 PagesDocument24 pagesThe Mechanical Properties of Polypropylene - Polylactic Acid (PP-PLA) Polymer Blends - 24 PagesSiddharthBhasneyNo ratings yet
- Trophy Urban Core Property: Houston, TexasDocument25 pagesTrophy Urban Core Property: Houston, Texasbella grandeNo ratings yet
- Untitled DocumentDocument2 pagesUntitled DocumentPramit MukherjeeNo ratings yet
- Mamake Bobo Recipe Book 1Document74 pagesMamake Bobo Recipe Book 1ngugibibaNo ratings yet
- STS Week 4 S&T and Nation-Building Part 2 PDFDocument40 pagesSTS Week 4 S&T and Nation-Building Part 2 PDFLawrence YusiNo ratings yet
- L01 - Review of Z TransformDocument17 pagesL01 - Review of Z TransformRanjith KumarNo ratings yet
- AREVA in NigerDocument20 pagesAREVA in Nigermushava nyokaNo ratings yet
- S4-4 Damping Paper TakedaDocument26 pagesS4-4 Damping Paper TakedaRonald Omar García RojasNo ratings yet
- Key Notes For Fire and Gas MappingDocument4 pagesKey Notes For Fire and Gas MappingAhmad MuzammilNo ratings yet
- Fumihiko Maki and His Theory of Collective Form - A Study On Its PDocument278 pagesFumihiko Maki and His Theory of Collective Form - A Study On Its PemiliosasofNo ratings yet
- EXP-LG-080251 - 0 - SuportDocument2 pagesEXP-LG-080251 - 0 - SuportRazvan PanaNo ratings yet
- Driver Licence & Learner Permit FeesDocument9 pagesDriver Licence & Learner Permit FeesAnatoly IvanovNo ratings yet
- Aiga 097-17 Ref Guide On Medical Gases Cylinder ValvesDocument7 pagesAiga 097-17 Ref Guide On Medical Gases Cylinder ValvesDeepakNo ratings yet
- Mfe Getting StartedDocument50 pagesMfe Getting StartedDinesh KNo ratings yet
- 4 - 20140515034803 - 1 Coase, R.H. 1937 The Nature of The FirmDocument24 pages4 - 20140515034803 - 1 Coase, R.H. 1937 The Nature of The FirmFelicia AprilianiNo ratings yet
- RF Wmhi14ds DF NDocument8 pagesRF Wmhi14ds DF NTabletaUnicaNo ratings yet
- 2018-2 TechPresentation BallDocument52 pages2018-2 TechPresentation BallAmar SheteNo ratings yet
- GeoseaDocument9 pagesGeoseaArthur WakashimasuNo ratings yet
- केन्द्रीय विद्यालय संगठन, कोलकाता संभाग Kendriya Vidyalaya Sangathan, Kolkata RegionDocument5 pagesकेन्द्रीय विद्यालय संगठन, कोलकाता संभाग Kendriya Vidyalaya Sangathan, Kolkata RegionMuskan MangarajNo ratings yet