Download as pdf or txt
You might also like
- Workshop 4 - Draft2Document6 pagesWorkshop 4 - Draft2Saatwick MathurNo ratings yet
- Assign 2Document29 pagesAssign 2liNo ratings yet
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Antenna Azimuth Position Control System Modelling, AnalysisDocument30 pagesAntenna Azimuth Position Control System Modelling, AnalysisMbongeni Maxwell100% (3)
- Numerical Sheet Control SystemsDocument20 pagesNumerical Sheet Control SystemsKAMARAJU SAI VAMSHINo ratings yet
- Tutorial 4 - Business AnalyticsDocument14 pagesTutorial 4 - Business AnalyticsRobin RichardsonNo ratings yet
- CNC Machine Case StudyDocument25 pagesCNC Machine Case StudyMohamed HamdyNo ratings yet
- Experiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveDocument11 pagesExperiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveAmine Y. AlamiNo ratings yet
- CONTROLLERDocument9 pagesCONTROLLERAsad AzharNo ratings yet
- Delft: Matlab and Simulink For Modeling and ControlDocument12 pagesDelft: Matlab and Simulink For Modeling and Controlawan_krNo ratings yet
- Name: Zulfiqar Ali.: Department of Electronic Engineering University of Engineering and Technology Abbottabad CampusDocument15 pagesName: Zulfiqar Ali.: Department of Electronic Engineering University of Engineering and Technology Abbottabad CampusZulfiqar AliNo ratings yet
- Modeling and Simulation of RLC Circuit (Band Pass Filter)Document25 pagesModeling and Simulation of RLC Circuit (Band Pass Filter)elneelNo ratings yet
- CSD Practical MannualDocument35 pagesCSD Practical MannualitsurturnNo ratings yet
- BEE3143 Assignment S1200910Document7 pagesBEE3143 Assignment S1200910Farhan Juice0% (2)
- Lecture I - Introduction To PID Control SystemDocument47 pagesLecture I - Introduction To PID Control SystemR.W. SaputraNo ratings yet
- Mech3418 Ca 2016Document4 pagesMech3418 Ca 2016Barry PoonNo ratings yet
- Project ReportDocument19 pagesProject ReportAriel FariasNo ratings yet
- Sistem Modeling: Physical Setup System Parameters Design Criteria System EquationsDocument52 pagesSistem Modeling: Physical Setup System Parameters Design Criteria System EquationsSepdifa D. RifayanaNo ratings yet
- Cruise Control System Using Root Locus MethodDocument8 pagesCruise Control System Using Root Locus Methodsachinsuresh89No ratings yet
- Phase Lead Compensator Design Project Mauricio Oñoro: Figure 1 Circuit To Be ControlledDocument8 pagesPhase Lead Compensator Design Project Mauricio Oñoro: Figure 1 Circuit To Be ControlledMauricio OñoroNo ratings yet
- 9 Ball and BeamDocument15 pages9 Ball and BeamshaheerdurraniNo ratings yet
- ME311 Autumn2020 EndSem FinalVersionDocument4 pagesME311 Autumn2020 EndSem FinalVersionVarun PathakNo ratings yet
- Physical Setup System Parameters Design Criteria System EquationsDocument55 pagesPhysical Setup System Parameters Design Criteria System EquationsEca AditNo ratings yet
- EE 2257-Control Systems Lab ManualDocument66 pagesEE 2257-Control Systems Lab ManualRam KumarNo ratings yet
- Ee481 p11 Root Locus DesignDocument77 pagesEe481 p11 Root Locus DesignDwi Ika BasithaNo ratings yet
- Lab 1Document11 pagesLab 1Maitha SaeedNo ratings yet
- Lecture 09 Electromechanical Systems LinearizationDocument32 pagesLecture 09 Electromechanical Systems LinearizationM HuzaifaNo ratings yet
- Example: DC Motor Speed Modeling: Physical Setup and System EquationsDocument18 pagesExample: DC Motor Speed Modeling: Physical Setup and System EquationsĐức SinhNo ratings yet
- Control BoostDocument10 pagesControl BoostNikunj AgarwalNo ratings yet
- T2 BlockDiagram SFG Time ResponseDocument9 pagesT2 BlockDiagram SFG Time ResponseRaj PatelNo ratings yet
- Lab 1 To Study The Lead Compensator DesignDocument6 pagesLab 1 To Study The Lead Compensator DesignMuhammad AsaadNo ratings yet
- Week 3 MatlabDocument7 pagesWeek 3 MatlabFERHAT BODURNo ratings yet
- Exp 2 InstroDocument16 pagesExp 2 InstroAbed Alrahman QaddourNo ratings yet
- Tutorial III Root Locus DesignDocument25 pagesTutorial III Root Locus Designapi-3856083100% (3)
- Edited - Project-Control-6210500358Document18 pagesEdited - Project-Control-6210500358ณัฐวัศ มั่นบุญสมNo ratings yet
- Matlab and Simulink For Modeling and Control DC MotorDocument14 pagesMatlab and Simulink For Modeling and Control DC MotorGhaleb AlzubairiNo ratings yet
- Compilation of Matlab Problems and SolutionsDocument14 pagesCompilation of Matlab Problems and SolutionsGem AguimbagNo ratings yet
- Tutorial III Root Locus DesignDocument25 pagesTutorial III Root Locus DesignNur DalilaNo ratings yet
- NEWLab1 Servo2 v5 LabManualDocument9 pagesNEWLab1 Servo2 v5 LabManualkrups1991No ratings yet
- Krispay FinalDocument9 pagesKrispay FinalSayaf KhanNo ratings yet
- TP 2 AsservDocument13 pagesTP 2 AsservhiNo ratings yet
- Practical CaseDocument13 pagesPractical Casesreeragks1989No ratings yet
- ProblemasDocument6 pagesProblemasalexandraNo ratings yet
- DCS 01 (Dcspeed)Document16 pagesDCS 01 (Dcspeed)K PranavNo ratings yet
- BTL HuyTan-doneDocument11 pagesBTL HuyTan-donePHONG LÊ BÁNo ratings yet
- EE206 Control Systems Tutorial - 18Document5 pagesEE206 Control Systems Tutorial - 18Haelu KuNo ratings yet
- TE 2019 MechatronicsDocument6 pagesTE 2019 MechatronicsVishalNo ratings yet
- hw2 SolDocument11 pageshw2 SolSaied Aly SalamahNo ratings yet
- Control SystemsDocument10 pagesControl SystemsSagaraptor RexNo ratings yet
- Ee 331 Design - Servo MotorDocument5 pagesEe 331 Design - Servo MotorLa-Pierre O'MeallyNo ratings yet
- QuestinsDocument6 pagesQuestinsSujeet KumarNo ratings yet
- Digital Signal ProcessingDocument7 pagesDigital Signal ProcessingAhsan MalikNo ratings yet
- An Introduction To Electrostatic ActuatorDocument32 pagesAn Introduction To Electrostatic Actuatormujeeb.abdullah2830No ratings yet
- C&i Lab-2019Document67 pagesC&i Lab-2019aniruthNo ratings yet
- Speed Control of DC Servo Motor Using PIDocument26 pagesSpeed Control of DC Servo Motor Using PIUjjawal DarvaikarNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Numerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityFrom EverandNumerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityNo ratings yet
- Calculus Base Physics Quiz 1 To Finals 100%Document17 pagesCalculus Base Physics Quiz 1 To Finals 100%Sun Tea SeguinNo ratings yet
- Monthly Test (April) - Igcse Maths: Marks %Document6 pagesMonthly Test (April) - Igcse Maths: Marks %Aqilah AbdullahNo ratings yet
- Breve Catálogo de Productos - MASON IndustriesDocument4 pagesBreve Catálogo de Productos - MASON IndustriesAndres SanchezNo ratings yet
- CPCS202 08 Arrays 2d S19Document51 pagesCPCS202 08 Arrays 2d S19Al SuNo ratings yet
- Lect - 2 - Earthquake - Resistant - Systems - Part 3Document5 pagesLect - 2 - Earthquake - Resistant - Systems - Part 3jana ShmaysemNo ratings yet
- NSO Sample Paper Class 10Document11 pagesNSO Sample Paper Class 10Rana MukherjeeNo ratings yet
- Acf1e9b PDFDocument90 pagesAcf1e9b PDFJorge TelecomNo ratings yet
- QUESTIONS and Answers by Islam ShakerDocument29 pagesQUESTIONS and Answers by Islam Shakeralaa kamelNo ratings yet
- A Supriyanto RRL Ian Carlo CahiloDocument3 pagesA Supriyanto RRL Ian Carlo CahiloIan Carlo CahiloNo ratings yet
- MY EXCEL GUIDE Beginners, Intermediate, Advanced - Microsoft ExcelDocument57 pagesMY EXCEL GUIDE Beginners, Intermediate, Advanced - Microsoft Excelcharlotte.adgNo ratings yet
- MCSet 17.5 KV - MCSET - AD1 - LF - EVDocument2 pagesMCSet 17.5 KV - MCSET - AD1 - LF - EVSrihari Kumar andavilliNo ratings yet
- F1Document23 pagesF1asif romanNo ratings yet
- Basic Allied Health Statistics and AnalysisDocument289 pagesBasic Allied Health Statistics and AnalysisAlaa Abu AishehNo ratings yet
- Know Your Venus SignDocument19 pagesKnow Your Venus SignBimz MeisnamNo ratings yet
- Activity #6 SAMPLING DISTRIBUTIONSDocument8 pagesActivity #6 SAMPLING DISTRIBUTIONSleonessa jorban cortes0% (1)
- Information Technology Infrastructure Library (ITIL)Document42 pagesInformation Technology Infrastructure Library (ITIL)aftershow76No ratings yet
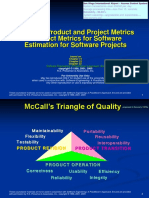
- Process, Product and Project Metrics Product Metrics For Software Estimation For Software ProjectsDocument46 pagesProcess, Product and Project Metrics Product Metrics For Software Estimation For Software ProjectsNassah AllaabNo ratings yet
- AutoMax-80 LIS Manual PDFDocument51 pagesAutoMax-80 LIS Manual PDFDani Dwi PutraNo ratings yet
- Class 8 CH 5 Data Handling August 19Document3 pagesClass 8 CH 5 Data Handling August 19shayn budihardjoNo ratings yet
- Data Comm Experiment 5 PDFDocument8 pagesData Comm Experiment 5 PDFMohammad Saydul AlamNo ratings yet
- Mechanical Datasheet - Wellhead Compressor Package Rev BDocument12 pagesMechanical Datasheet - Wellhead Compressor Package Rev BRokan Pipeline100% (1)
- Chapter 2Document40 pagesChapter 2Negash adane100% (1)
- Topic 9 Broiler Industry (Hatchery Management)Document56 pagesTopic 9 Broiler Industry (Hatchery Management)Musonda MwapeNo ratings yet
- Surface Mount EMI Filters X2YDocument9 pagesSurface Mount EMI Filters X2YsetrabporciunculaNo ratings yet
- (21 3) Thyristor Power Packs Modular - 21052016 - LatestDocument6 pages(21 3) Thyristor Power Packs Modular - 21052016 - LatestPardeep KhosaNo ratings yet
- Bentley NevadaDocument4 pagesBentley NevadarenvouzNo ratings yet
- Basic Engine: Systems OperationDocument2 pagesBasic Engine: Systems OperationMedo SowarNo ratings yet
- Database AssignmentDocument3 pagesDatabase AssignmentkaybNo ratings yet