Download as docx, pdf, or txt
You might also like
- NRG Conservation of Energy - Maximize The Mechanical Energy of A Rollercoaster Lab Manual EnglishDocument7 pagesNRG Conservation of Energy - Maximize The Mechanical Energy of A Rollercoaster Lab Manual EnglishDISTOR, JOSH GABRIELNo ratings yet
- 3 Research Proposal - Jimenez, Mary Grace P.Document13 pages3 Research Proposal - Jimenez, Mary Grace P.Mary Grace Jimenez100% (3)
- VI DataDocument4 pagesVI Datapetermurphy2000002No ratings yet
- Impedance and Reactance: Faculty of Science Department of Physics Physics Lab 112Document4 pagesImpedance and Reactance: Faculty of Science Department of Physics Physics Lab 112issa alatrashNo ratings yet
- Team 2, Please Contact Alex Franco (Afrancoh@fiu - Edu) in Advance Regarding Running YourDocument4 pagesTeam 2, Please Contact Alex Franco (Afrancoh@fiu - Edu) in Advance Regarding Running YoursantanucctNo ratings yet
- University of Jordan School of Engineering Department of Mechanical Engineering Mechanical Vibrations Lab Simple & Compound PendulumsDocument9 pagesUniversity of Jordan School of Engineering Department of Mechanical Engineering Mechanical Vibrations Lab Simple & Compound Pendulumsmazen ashaNo ratings yet
- Exp-2 (T-3)Document21 pagesExp-2 (T-3)Tectonic ArtNo ratings yet
- YEARDocument14 pagesYEARtassawarNo ratings yet
- SNAP Practice: One. 1 Mass System AnalysisDocument3 pagesSNAP Practice: One. 1 Mass System AnalysisRika SakaiNo ratings yet
- SNAP Practice: One. 1 Mass System AnalysisDocument3 pagesSNAP Practice: One. 1 Mass System AnalysisRika SakaiNo ratings yet
- Gas Absorption 1Document16 pagesGas Absorption 1Rahmeh EL saaiedehNo ratings yet
- TorsionDocument2 pagesTorsionNURUL ILIYA ZAMREENo ratings yet
- Petrobras - Cenpes - Pdab - TFCC: Summary Report Surface AreaDocument13 pagesPetrobras - Cenpes - Pdab - TFCC: Summary Report Surface AreaWilliams Galiano CarrilloNo ratings yet
- Appendixes: Appendix Particle Size - 1 - A - AluminumDocument19 pagesAppendixes: Appendix Particle Size - 1 - A - AluminumIbrahim HeaderNo ratings yet
- Radianes 1.9251014958 4 Cos ( 1) ( / ) : Datos Iniciales GeometriaDocument15 pagesRadianes 1.9251014958 4 Cos ( 1) ( / ) : Datos Iniciales GeometriaDavid CastilloNo ratings yet
- Nama: Ersa Kusumawardani NPM: 0115103003/reg B2/C Mata Kuliah: Statistik Multivariat Tugas Eviews 1Document9 pagesNama: Ersa Kusumawardani NPM: 0115103003/reg B2/C Mata Kuliah: Statistik Multivariat Tugas Eviews 1ersa kusumawardaniNo ratings yet
- Dupont FinalDocument5 pagesDupont FinalbiccyNo ratings yet
- ET 310 Lab 4Document19 pagesET 310 Lab 4DylanNo ratings yet
- Course: Soil Mechanics II Code: CVNG 2009 Lab: Consolidation Name: Adrian Rampersad I.D:809001425Document16 pagesCourse: Soil Mechanics II Code: CVNG 2009 Lab: Consolidation Name: Adrian Rampersad I.D:809001425Adrian Mufc RampersadNo ratings yet
- Gas Absorption Lab ReportDocument12 pagesGas Absorption Lab ReportGracylla RoseNo ratings yet
- NO. Elements Page NoDocument21 pagesNO. Elements Page NoandriasNo ratings yet
- SLH AppendicesDocument8 pagesSLH Appendicessadiqmedical160No ratings yet
- 5Document2 pages5Lekidelu AsratNo ratings yet
- Hydrological and Hydraulic Analysis Example (1) .Xls AgutanDocument13 pagesHydrological and Hydraulic Analysis Example (1) .Xls AgutanKevin CondeNo ratings yet
- Test Report CP16-210 - Y5K23F2515 PSIDocument1 pageTest Report CP16-210 - Y5K23F2515 PSIDieguin SuárezNo ratings yet
- Transformer Design FormulasDocument8 pagesTransformer Design Formulasvishwas raneNo ratings yet
- Spectroscopic Identification of Inorganic Compounds: 3.1 Nuclear Magnetic Resonance SpectrosDocument19 pagesSpectroscopic Identification of Inorganic Compounds: 3.1 Nuclear Magnetic Resonance SpectrosakhileshbhuNo ratings yet
- Model RegresieDocument14 pagesModel RegresieIon BataNo ratings yet
- Metodo Regresion Lineal:: Determinacion de La Curva Elevaciones-GastosDocument20 pagesMetodo Regresion Lineal:: Determinacion de La Curva Elevaciones-Gastosjhonatan acuña dominguezNo ratings yet
- Lab 5 Centrifugal Force FinalDocument11 pagesLab 5 Centrifugal Force FinalFarhan EdwinNo ratings yet
- Envolventes MaderasDocument29 pagesEnvolventes MaderasSayco Vilela LopezNo ratings yet
- F4001 Vortex Flowmeter ManualDocument24 pagesF4001 Vortex Flowmeter ManualHafidGaneshaSecretrdreamholicNo ratings yet
- Shell & Tube Heat ExchangerDocument4 pagesShell & Tube Heat ExchangerYash KayasthNo ratings yet
- Bayu Data 2Document10 pagesBayu Data 2Asep Neris BachtiarNo ratings yet
- Bayu Data 2Document10 pagesBayu Data 2Asep Neris BachtiarNo ratings yet
- ASDA - FIS05 - WELDI SATRIA - LPS01 - SignedDocument3 pagesASDA - FIS05 - WELDI SATRIA - LPS01 - SignedWeldi SatriaNo ratings yet
- MaryDocument9 pagesMarymhtofighiNo ratings yet
- Lyocycle Design and Transfer Template Breckenridge Workshop - Pfizer OriginalDocument391 pagesLyocycle Design and Transfer Template Breckenridge Workshop - Pfizer OriginalThien Doan ChiNo ratings yet
- Pure Bending Exp ReportDocument5 pagesPure Bending Exp Reportabo MakbasNo ratings yet
- HSS Itb-2Document116 pagesHSS Itb-2Aidil AuliaNo ratings yet
- Slope Stability AnalysisDocument5 pagesSlope Stability Analysissallysel90No ratings yet
- T (Jam) Pws (Psig) : Chart TitleDocument15 pagesT (Jam) Pws (Psig) : Chart TitleFajar Putra NugrahaNo ratings yet
- Datos SumDocument12 pagesDatos SumVictor OcampoNo ratings yet
- Ardl Analysis Chapter Four UpdatedDocument11 pagesArdl Analysis Chapter Four Updatedsadiqmedical160No ratings yet
- Test ModelDocument17 pagesTest ModelThanapat ThepubonNo ratings yet
- Experiment 2Document7 pagesExperiment 2Refisa JiruNo ratings yet
- Appendix A: Table 2. Measurements at Different Amplitudes (Degrees)Document7 pagesAppendix A: Table 2. Measurements at Different Amplitudes (Degrees)KateNo ratings yet
- Rain Water Basin DesignDocument11 pagesRain Water Basin DesignSturza AnastasiaNo ratings yet
- EXP10_BK21110210_MOHAMMAD SYAFIQ BIN AJIK_INFORMALDocument12 pagesEXP10_BK21110210_MOHAMMAD SYAFIQ BIN AJIK_INFORMALapikNo ratings yet
- Physics Experiment No 3Document8 pagesPhysics Experiment No 3Instagram OfficeNo ratings yet
- Transformer DesignDocument8 pagesTransformer DesignAzminAg100% (1)
- Tutorial 7 SolutionDocument1 pageTutorial 7 SolutionIshika SinghNo ratings yet
- Stand Pipe No.1 (116072A01000) :: LSNZD D LSNZ D LSNZDocument10 pagesStand Pipe No.1 (116072A01000) :: LSNZD D LSNZ D LSNZAyush ChoudharyNo ratings yet
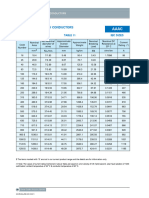
- 0-AAAC-Oman-01 PageDocument1 page0-AAAC-Oman-01 Pagenarinder kumarNo ratings yet
- ARDL ANALYSIS APPENDIX FinalDocument28 pagesARDL ANALYSIS APPENDIX Finalsadiqmedical160No ratings yet
- Energy Systems II Lab (ME401A) : Experiment 1Document11 pagesEnergy Systems II Lab (ME401A) : Experiment 1Abhishek BansalNo ratings yet
- Lab Report 1Document4 pagesLab Report 1DIVYANSHU GUPTANo ratings yet
- ReportDocument2 pagesReportAninda DuttaNo ratings yet
- DD444Document5 pagesDD444Alejandro Moral ArandaNo ratings yet
- DatasheetDocument32 pagesDatasheetsintiaaaaNo ratings yet
- Aw2.9bk6 12ax1 ManualDocument63 pagesAw2.9bk6 12ax1 ManualjassimNo ratings yet
- Advanced Plasma TechnologyFrom EverandAdvanced Plasma TechnologyRiccardo d'AgostinoNo ratings yet
- Ich E2f DsurDocument23 pagesIch E2f Dsurvinay patidarNo ratings yet
- V - 01 - I-Mesh EngDocument36 pagesV - 01 - I-Mesh EngVlè KaNo ratings yet
- Thermal 1 Heat Vs TemperatureDocument16 pagesThermal 1 Heat Vs TemperatureBrian TotmanNo ratings yet
- Chapter 1: Introduction To Applied Economics Economic ResourcesDocument4 pagesChapter 1: Introduction To Applied Economics Economic ResourcesLudgi RuizNo ratings yet
- District Memo LDM 2Document4 pagesDistrict Memo LDM 2Rosalie MarquezNo ratings yet
- Fungi: Candida Auris: A Review of Recommendations For Detection and Control in Healthcare SettingsDocument11 pagesFungi: Candida Auris: A Review of Recommendations For Detection and Control in Healthcare SettingschiralicNo ratings yet
- Design of Pot Ptfe Bearing (Fixed Bearing) As Per Irc 83:2002 (Part 3)Document7 pagesDesign of Pot Ptfe Bearing (Fixed Bearing) As Per Irc 83:2002 (Part 3)DPJAIN INFRASTRUCTURE100% (2)
- Andrew Zago, Awkward Position, 2010Document15 pagesAndrew Zago, Awkward Position, 2010Davide Tommaso FerrandoNo ratings yet
- Ncjescoa 10Document61 pagesNcjescoa 10ODDENSIGN 2007No ratings yet
- Arenstorf OriginalDocument18 pagesArenstorf OriginalMister DumbledoreNo ratings yet
- RE: Edmund Street, Camberwell SE5Document67 pagesRE: Edmund Street, Camberwell SE5Tarek AbulailNo ratings yet
- Science 10 TosDocument5 pagesScience 10 TosMenard Licuanan RosalesNo ratings yet
- Diesel Ignition TemperatureDocument2 pagesDiesel Ignition Temperaturewahaha06No ratings yet
- Frank ISC Mathematics Model Test Paper 20Document3 pagesFrank ISC Mathematics Model Test Paper 20Rohan Chakraborty100% (3)
- Household Services 4th Quarter Answer KeyDocument1 pageHousehold Services 4th Quarter Answer KeyJohn Matthew PrimaNo ratings yet
- 2 Teak DeckingDocument25 pages2 Teak DeckingJoshua Swee100% (1)
- Readings in Phil Hist HandoutsDocument28 pagesReadings in Phil Hist HandoutsNicole FerrerNo ratings yet
- Comm 1100 Info Speech (Tolentino, Nirelle V.)Document5 pagesComm 1100 Info Speech (Tolentino, Nirelle V.)Nirelle TolentinoNo ratings yet
- Blasco-Yepes & PayriDocument7 pagesBlasco-Yepes & PayriInês SacaduraNo ratings yet
- DIY Spindel Anleitung enDocument10 pagesDIY Spindel Anleitung enM FNo ratings yet
- Parallel Plate Capactior SimulationDocument8 pagesParallel Plate Capactior Simulationapi-300597191100% (1)
- Master Opp GaveDocument112 pagesMaster Opp GaveFirda FitriaNo ratings yet
- Flare Pit Cleaning TechnologyDocument27 pagesFlare Pit Cleaning TechnologyAhmed GamaladdinNo ratings yet
- Rational FunctionDocument34 pagesRational FunctionJames Marck BabieraNo ratings yet
- Lesson 4 - Ideation and Design ThinkingDocument92 pagesLesson 4 - Ideation and Design ThinkingKimberly MarbellaNo ratings yet
- Qiyas 2Document15 pagesQiyas 2linamalki98No ratings yet
- Score SheetsDocument6 pagesScore SheetsErika Bose CantoriaNo ratings yet