Download as pdf or txt
You might also like
- Web Dao Đ NG Và SóngDocument6 pagesWeb Dao Đ NG Và SóngdinhlynhndNo ratings yet
- Unit-I 5Document17 pagesUnit-I 5Nafoora ProjectsNo ratings yet
- Vibration Example:-DealsDocument10 pagesVibration Example:-DealsmanishtopsecretsNo ratings yet
- Week 4 - General Physics Damped Oscillations PDFDocument77 pagesWeek 4 - General Physics Damped Oscillations PDFMary Rose Jusay GumapacNo ratings yet
- Oscillations (1) 1Document12 pagesOscillations (1) 1The greatest familyNo ratings yet
- Chapter OneDocument59 pagesChapter OneAbenezer MarkNo ratings yet
- OSCILLATIONDocument38 pagesOSCILLATIONnikita.22ba34No ratings yet
- Sau 1304Document126 pagesSau 1304Emmanuella EmefeNo ratings yet
- Physics Handouts HandoutsDocument7 pagesPhysics Handouts HandoutsLeanne Macayan SantosNo ratings yet
- Vibration 1Document39 pagesVibration 1Jobin VargheseNo ratings yet
- Oscillation:: Relate Period T, Frequency F, and Angular Frequency VDocument2 pagesOscillation:: Relate Period T, Frequency F, and Angular Frequency VrickNo ratings yet
- Basics of Structural DynamicsDocument22 pagesBasics of Structural Dynamicsdskumar49No ratings yet
- Lecture 05Document3 pagesLecture 05Ariyan Abrar SaifNo ratings yet
- Oscillation Notes Neet - PDF 44Document13 pagesOscillation Notes Neet - PDF 44merrythomas873No ratings yet
- Group3 - Module 2 - Full ReportDocument8 pagesGroup3 - Module 2 - Full ReportERVIN JAMES ABULOCNo ratings yet
- Group 3 Module 2 Natural and Transverse VibrationDocument8 pagesGroup 3 Module 2 Natural and Transverse VibrationERVIN JAMES ABULOCNo ratings yet
- What Is The Basic Concept of VibrationDocument5 pagesWhat Is The Basic Concept of VibrationVimal WoosyeNo ratings yet
- Rotational Motion: ST Paul University PhilippinesDocument11 pagesRotational Motion: ST Paul University PhilippinesVinz TaquiquiNo ratings yet
- Mechanical Vibrations (3) : July 2017Document94 pagesMechanical Vibrations (3) : July 2017nataraj deshpandeNo ratings yet
- SHM Notes CompleteDocument58 pagesSHM Notes CompleteTushar SinghNo ratings yet
- Oscillatory Motion 1Document15 pagesOscillatory Motion 1Rovshen BayramovNo ratings yet
- What Is Vibratory Motion?Document11 pagesWhat Is Vibratory Motion?Sourav BorahNo ratings yet
- UNIT 1 Mechanical Vibration PDFDocument10 pagesUNIT 1 Mechanical Vibration PDFsagar kadamNo ratings yet
- Mechanical Vibrations (10me72)Document167 pagesMechanical Vibrations (10me72)swetha shree chavan mNo ratings yet
- Chapter 1Document116 pagesChapter 1muhammad azwan zul-kifleyNo ratings yet
- Mechanical VibrationsDocument126 pagesMechanical VibrationsSidhant Kumar SahooNo ratings yet
- Vibration Is The Motion of Particle or A Body or System of Connected Bodies Displaced From The Position of EquilibriumDocument9 pagesVibration Is The Motion of Particle or A Body or System of Connected Bodies Displaced From The Position of EquilibriumrajuNo ratings yet
- University Physics Volume 1Document36 pagesUniversity Physics Volume 1Vipul BansalNo ratings yet
- Simple Harmonic MotionDocument6 pagesSimple Harmonic MotionshahabiogamexzNo ratings yet
- CHAPTER 14 - Oscillations - PramadaDocument12 pagesCHAPTER 14 - Oscillations - PramadaAnhad SinghNo ratings yet
- 11 Physics Cbse OscillationDocument6 pages11 Physics Cbse Oscillationvickyvicky0022okNo ratings yet
- My Lecture Vibration OkokDocument10 pagesMy Lecture Vibration OkokddNo ratings yet
- Vibration TerminologyDocument2 pagesVibration TerminologyMoe Thiri ZunNo ratings yet
- Oscillations Class 11 Notes Physics: - Periodic MotionDocument6 pagesOscillations Class 11 Notes Physics: - Periodic MotionKunal PrasadNo ratings yet
- Basics of VibrationsDocument45 pagesBasics of Vibrationsravimech_862750No ratings yet
- 03 Basics of VibrationsDocument45 pages03 Basics of VibrationsAntonette DatoonNo ratings yet
- OCR A Physics A-Level: Topic 5.4: OscillationsDocument4 pagesOCR A Physics A-Level: Topic 5.4: OscillationsjmsonlNo ratings yet
- Ch.14 Oscillations NotesDocument8 pagesCh.14 Oscillations NotesEducation PointNo ratings yet
- Chapter One: 1.1 Basic Concepts of VibrationDocument6 pagesChapter One: 1.1 Basic Concepts of VibrationShuguta LatiNo ratings yet
- Vibrations and Its Types: Presented By: Er. Sahil Sharma Department of Civil EngineeringDocument12 pagesVibrations and Its Types: Presented By: Er. Sahil Sharma Department of Civil EngineeringSaHil ShaRmaNo ratings yet
- Chapter 10Document10 pagesChapter 10Miraj ahmadNo ratings yet
- Handouts On DOMDocument10 pagesHandouts On DOMGitanj ShethNo ratings yet
- Oscillations A2Document2 pagesOscillations A2Md Irtiza HafizNo ratings yet
- RRB Alp Ex: Studymaterialforgeneral ScienceDocument14 pagesRRB Alp Ex: Studymaterialforgeneral Sciencebmx143unitedNo ratings yet
- MvneDocument125 pagesMvnesunilNo ratings yet
- Mechanical Vibration: Chapter - 1Document29 pagesMechanical Vibration: Chapter - 1abebawalemkerNo ratings yet
- A2 Oscillation PDFDocument29 pagesA2 Oscillation PDFhussainNo ratings yet
- Chapter One1Document28 pagesChapter One1Saleamilak tamiruNo ratings yet
- 1 TVgovindrajDocument10 pages1 TVgovindrajvijaynagathanNo ratings yet
- Note 1Document2 pagesNote 1zaydinsurgentNo ratings yet
- Cheatsheet Mechanical VibrationsDocument16 pagesCheatsheet Mechanical VibrationsTatik JuwariyahNo ratings yet
- VibrationDocument18 pagesVibrationKamille NayraNo ratings yet
- Chapter-9 Periodic MotionDocument8 pagesChapter-9 Periodic Motion2220678No ratings yet
- Mechanical Vibrations Lecture NotesDocument133 pagesMechanical Vibrations Lecture NotesHarrison AdemuNo ratings yet
- Oscillation SDocument91 pagesOscillation SGarlapati Srinivasa RaoNo ratings yet
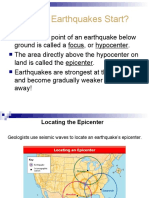
- Where Do Earthquakes Start?Document22 pagesWhere Do Earthquakes Start?diksha singhNo ratings yet
- Free VibrationDocument12 pagesFree Vibrationkebba kahNo ratings yet
- How Do Waves Behave? How Are They Measured? Physics Lessons for Kids | Children's Physics BooksFrom EverandHow Do Waves Behave? How Are They Measured? Physics Lessons for Kids | Children's Physics BooksNo ratings yet
- Terms ALGEBRA ONLY 1 100 OnlyDocument101 pagesTerms ALGEBRA ONLY 1 100 OnlyRonaldRajumNo ratings yet
- Engineering EconomyDocument28 pagesEngineering EconomyRonaldRajumNo ratings yet
- Trigonometry 2Document12 pagesTrigonometry 2RonaldRajumNo ratings yet
- Mesl 2020 Past Board ExamDocument10 pagesMesl 2020 Past Board ExamRonaldRajumNo ratings yet
- Mech Lab 3 - Mini Ice PlantDocument30 pagesMech Lab 3 - Mini Ice PlantRonaldRajumNo ratings yet
- Preboards 1 MeslDocument4 pagesPreboards 1 MeslRonaldRajumNo ratings yet
- Vibration Group 2 CompressedDocument51 pagesVibration Group 2 CompressedRonaldRajumNo ratings yet
- Hydroelectric Power Plant - Plate 3Document1 pageHydroelectric Power Plant - Plate 3RonaldRajumNo ratings yet
- Answers Plate 4 - Refrigeration PlantDocument2 pagesAnswers Plate 4 - Refrigeration PlantRonaldRajumNo ratings yet
- MDSP Set 3Document23 pagesMDSP Set 3RonaldRajumNo ratings yet
- Warm Up Exam # 2 QuestionerDocument6 pagesWarm Up Exam # 2 QuestionerJimmy GutierrezNo ratings yet
- Section 159Xx: Greystone Energy Systems, Inc. Sample Technical SpecificationDocument18 pagesSection 159Xx: Greystone Energy Systems, Inc. Sample Technical SpecificationPrashantNo ratings yet
- Drafts Andchimney PDFDocument3 pagesDrafts Andchimney PDFJayson Ben ArbasNo ratings yet
- Design and Stress Analysis of A General Aviation ADocument8 pagesDesign and Stress Analysis of A General Aviation AGhassan MousaNo ratings yet
- Computer Fundamentals: Pradeep K. Sinha & Priti SinhaDocument0 pagesComputer Fundamentals: Pradeep K. Sinha & Priti SinhaWamiq ReyazNo ratings yet
- Walk Forward Optimization by John EhlersDocument3 pagesWalk Forward Optimization by John EhlersquimkoNo ratings yet
- 3BSE035982-510 - en AC 800M 5.1 Communication ProtocolsDocument188 pages3BSE035982-510 - en AC 800M 5.1 Communication Protocolsbacuoc.nguyen356No ratings yet
- REVIEW MATERIAL Basic Calculus Midterm 2023 2024 2Document12 pagesREVIEW MATERIAL Basic Calculus Midterm 2023 2024 2regineNo ratings yet
- Education: Rishabh AgarwalDocument2 pagesEducation: Rishabh AgarwalGopinath BalamuruganNo ratings yet
- tp6998 PDFDocument206 pagestp6998 PDFAlexandre PatrocinioNo ratings yet
- AC Circuits Module 1Document28 pagesAC Circuits Module 1YoNo ratings yet
- SSH Client LogDocument9 pagesSSH Client LogbrightmsfstarNo ratings yet
- Soft PluginsDocument2 pagesSoft PluginsVinicius BernucciNo ratings yet
- Questions About Reverse OsmosisDocument6 pagesQuestions About Reverse OsmosisManjunath HrmNo ratings yet
- LTE Handover Fault Diagnosis (Traffic KPIs)Document100 pagesLTE Handover Fault Diagnosis (Traffic KPIs)Mesfin TibebeNo ratings yet
- Advanced Extensible Interface (Axi)Document23 pagesAdvanced Extensible Interface (Axi)ankurNo ratings yet
- Data Link LayerDocument107 pagesData Link LayerRekha V RNo ratings yet
- Aic23 DatasheetDocument44 pagesAic23 DatasheetBalacescu ClaudiuNo ratings yet
- Practice Problem 2 PDFDocument2 pagesPractice Problem 2 PDFDeeksha MishraNo ratings yet
- Samia PDFDocument7 pagesSamia PDFMohamed Sayed AbdoNo ratings yet
- BIAINDocument198 pagesBIAINNicholas JohnNo ratings yet
- CoypuDocument20 pagesCoypuperfectNo ratings yet
- Gyandeep - Anniversary Issue - 2016 PDFDocument21 pagesGyandeep - Anniversary Issue - 2016 PDFranvirsahiNo ratings yet
- International Foundation Mathematics Olympiad (IFMO) Class 5 Worksheet - 2Document6 pagesInternational Foundation Mathematics Olympiad (IFMO) Class 5 Worksheet - 2Vikas Kumar OmarNo ratings yet
- Albertina Castro-Integral Imaging With Large Depth of Field Using An Asymmetric Phase MaskDocument8 pagesAlbertina Castro-Integral Imaging With Large Depth of Field Using An Asymmetric Phase MaskJorge Francisco Victoria RodriguezNo ratings yet
- Bioresource Technology: Mirjana G. Antov, Marina B. ŠC Iban, Nada J. PetrovicDocument3 pagesBioresource Technology: Mirjana G. Antov, Marina B. ŠC Iban, Nada J. PetrovicSulaiman OluwapelumiNo ratings yet
- November 2021 QPDocument36 pagesNovember 2021 QPPhoneHtut KhaungMinNo ratings yet
- B C C C E D A A A: Start For All ParticipantsDocument4 pagesB C C C E D A A A: Start For All ParticipantsSubbaiah KotrangadaNo ratings yet
- B400 Product SpecificationDocument2 pagesB400 Product SpecificationStephen RetzlaffNo ratings yet