Download as pdf or txt
You might also like
- Gord Is 1979Document12 pagesGord Is 1979NixonNo ratings yet
- An Introduction to the Theory of ElasticityFrom EverandAn Introduction to the Theory of ElasticityRating: 4.5 out of 5 stars4.5/5 (2)
- Open Well Staircase: 1. Design DataDocument7 pagesOpen Well Staircase: 1. Design DataEr Saroj Paudel100% (1)
- Giuseppe Saccomandi - Elastic Rods, Weierstrass' Theory and Special Travelling Waves Solutions With Compact SupportDocument9 pagesGiuseppe Saccomandi - Elastic Rods, Weierstrass' Theory and Special Travelling Waves Solutions With Compact SupportLymesNo ratings yet
- Oq-2022-Tyszka-Indirect Stabilization of A Coupled System by Memory EffectsDocument21 pagesOq-2022-Tyszka-Indirect Stabilization of A Coupled System by Memory EffectsAndré mashNo ratings yet
- Freitas JAT, Moldovan ID, Toma M - Trefftz Spectral Analysis of Biphasic Media, 6th World Congress On Computational Mechanics, (Beijing, 2004)Document12 pagesFreitas JAT, Moldovan ID, Toma M - Trefftz Spectral Analysis of Biphasic Media, 6th World Congress On Computational Mechanics, (Beijing, 2004)Dragos Ionut MoldovanNo ratings yet
- Mesomechanic Analysis of Time Dependent Concrete Behavior: R. Lorefice & G. Etse C.M L Opez & I. CarolDocument9 pagesMesomechanic Analysis of Time Dependent Concrete Behavior: R. Lorefice & G. Etse C.M L Opez & I. CarolRicardo Horacio LoreficeNo ratings yet
- Measurement of Synamic Properties of Rubber (About Dif Tan Delta)Document7 pagesMeasurement of Synamic Properties of Rubber (About Dif Tan Delta)seran ünalNo ratings yet
- Frequency Dependence of Complex Moduli of Brain Tissue Using A Fractional Zener ModelDocument8 pagesFrequency Dependence of Complex Moduli of Brain Tissue Using A Fractional Zener Modellux_kingNo ratings yet
- Frequency Domain Analysis of Continuous - FasanaDocument18 pagesFrequency Domain Analysis of Continuous - FasanaPietro TestaNo ratings yet
- Controllability of Non-Newtonian Fluids Under Homogeneous Extensional FlowDocument12 pagesControllability of Non-Newtonian Fluids Under Homogeneous Extensional FlowRoman TereschenkoNo ratings yet
- On The Maxwell Stefan Approach To MultiDocument13 pagesOn The Maxwell Stefan Approach To Multishubhankar_psNo ratings yet
- Brownian Dynamics HandbookDocument14 pagesBrownian Dynamics HandbookRizcky TamaranyNo ratings yet
- The Royal SocietyDocument18 pagesThe Royal Societyluismiguel1092No ratings yet
- Kinetics of Martensitic Phase Transitions: Lattice ModelDocument21 pagesKinetics of Martensitic Phase Transitions: Lattice ModelEdgar Apaza HuallpaNo ratings yet
- Pettermann and DeSimone 2018 - An Anisotropic Linear-Thermo Viscoelastic Contitutive Law-1Document13 pagesPettermann and DeSimone 2018 - An Anisotropic Linear-Thermo Viscoelastic Contitutive Law-1rodrigo.vilela.gorgaNo ratings yet
- Neural Fields With Fast Learning Dynamic KernelDocument12 pagesNeural Fields With Fast Learning Dynamic KernelJuan Carlos Moreno OrtizNo ratings yet
- Mixed FEM For ElastoplasticityDocument30 pagesMixed FEM For ElastoplasticitySadiq SarfarazNo ratings yet
- 1991-Turkington-SAM-A Computational Method For Solitary Internal Waves in A Continuously StratifiedDocument35 pages1991-Turkington-SAM-A Computational Method For Solitary Internal Waves in A Continuously StratifiedxutaosetNo ratings yet
- DePietro 2015Document8 pagesDePietro 2015pedroNo ratings yet
- Wrinkle Formations in Axi-Symmetrically Stretched Membranes: T E P J EDocument10 pagesWrinkle Formations in Axi-Symmetrically Stretched Membranes: T E P J EPablo CelmareNo ratings yet
- Non-Equilibrium Relation Between Mobility and Diffusivity of Interacting Brownian Particles Under ShearDocument15 pagesNon-Equilibrium Relation Between Mobility and Diffusivity of Interacting Brownian Particles Under ShearFernando MayorgaNo ratings yet
- Cond Mat Abraham HarrowellDocument22 pagesCond Mat Abraham HarrowellSneha RanjithNo ratings yet
- Displacement Transmissibility Characteristics of Harmonically Base Excited Damper Isolators With Mixed Viscous DampingDocument12 pagesDisplacement Transmissibility Characteristics of Harmonically Base Excited Damper Isolators With Mixed Viscous DampingHazeema AnjumNo ratings yet
- 10 1016@j Ijengsci 2016 01 001Document5 pages10 1016@j Ijengsci 2016 01 001AnamNo ratings yet
- Viscoelastic Damping 101: Paul Macioce, Roush Industries, IncDocument3 pagesViscoelastic Damping 101: Paul Macioce, Roush Industries, IncvdertiNo ratings yet
- Convergence of The Finite Volume Particle Method For Viscous FlowDocument6 pagesConvergence of The Finite Volume Particle Method For Viscous FlowManole BuicanNo ratings yet
- Rheological Modelling of Complex Fluids. I. The Concept of Effective Volume Fraction RevisitedDocument9 pagesRheological Modelling of Complex Fluids. I. The Concept of Effective Volume Fraction RevisitedodexNo ratings yet
- Continuum ApproximationsDocument41 pagesContinuum ApproximationsJohn WongNo ratings yet
- FDM, Fem, FVMDocument32 pagesFDM, Fem, FVMRaj EaswarmoorthiNo ratings yet
- Fluctuations 3-08Document31 pagesFluctuations 3-08Muhammad YounasNo ratings yet
- (J. J. Moreau, P. D. Panagiotopoulos (Eds.) ) NonsmDocument466 pages(J. J. Moreau, P. D. Panagiotopoulos (Eds.) ) NonsmSun ShineNo ratings yet
- Complementary Mixed Finite Element Formulations For ElastoplasticityDocument30 pagesComplementary Mixed Finite Element Formulations For Elastoplasticityking sunNo ratings yet
- ALizcano CyclicShearingResponseGranularMaterial 2018Document9 pagesALizcano CyclicShearingResponseGranularMaterial 2018Sergio Antonio Vergara SarmientoNo ratings yet
- SystemDocument43 pagesSystemgarridolopezNo ratings yet
- On Poisson's Ratio in Linearly Viscoelastic SolidsDocument19 pagesOn Poisson's Ratio in Linearly Viscoelastic Solidsvanhoa06No ratings yet
- Non Local TheoryDocument12 pagesNon Local TheoryAdnan JahangirNo ratings yet
- Stefane@it Uu SeDocument27 pagesStefane@it Uu SeRochak JainNo ratings yet
- 3 Chaboche - IJP - 2005Document26 pages3 Chaboche - IJP - 2005Donald ZekaNo ratings yet
- Circular Die Swell Evaluationof LDPEUsing Simplified Viscoelastic ModeDocument10 pagesCircular Die Swell Evaluationof LDPEUsing Simplified Viscoelastic ModeChandrasekarNo ratings yet
- Entanglement Effects in Polymer Solutions (Graessley - 1986)Document37 pagesEntanglement Effects in Polymer Solutions (Graessley - 1986)lejartkNo ratings yet
- Global Solutions For Incompressible Viscoelastic Fluids: Zhen Lei Chun Liu Yi ZhouDocument29 pagesGlobal Solutions For Incompressible Viscoelastic Fluids: Zhen Lei Chun Liu Yi ZhouZahra SamirNo ratings yet
- Separation of Damping and Velocity Strain Dependencies Using An Ultrasonic Monochromatic ExcitationDocument16 pagesSeparation of Damping and Velocity Strain Dependencies Using An Ultrasonic Monochromatic ExcitationMechriNo ratings yet
- Stability, Instability, and Bifurcation Phenomena in Non-Autonomous Differential EquationsDocument21 pagesStability, Instability, and Bifurcation Phenomena in Non-Autonomous Differential EquationsvahidNo ratings yet
- Paul C. Bressloff and Zachary P. Kilpatrick - Two-Dimensional Bumps in Piecewise Smooth Neural Fields With Synaptic DepressionDocument30 pagesPaul C. Bressloff and Zachary P. Kilpatrick - Two-Dimensional Bumps in Piecewise Smooth Neural Fields With Synaptic DepressionNeerFamNo ratings yet
- A Stability Condition For Turbulence Model: From EMMS Model To EMMS-based Turbulence ModelDocument26 pagesA Stability Condition For Turbulence Model: From EMMS Model To EMMS-based Turbulence Modeldr_m_azharNo ratings yet
- Rock Physics PDFDocument156 pagesRock Physics PDFMohammad NaqaviNo ratings yet
- Eshelby's Technique For Analyzing Inhomogeneities in GeomechanicsDocument27 pagesEshelby's Technique For Analyzing Inhomogeneities in GeomechanicsTim WongNo ratings yet
- Dynamical Superfluid-Insulator Transition in A Chain of Weakly Coupled Bose-Einstein CondensatesDocument5 pagesDynamical Superfluid-Insulator Transition in A Chain of Weakly Coupled Bose-Einstein CondensatescdcrossroaderNo ratings yet
- Relaxation of Surface Tension in The Liquid-Solid Interfaces of Lennard-Jones Liquids A.V. Lukyanov, A.E. LikhtmanDocument5 pagesRelaxation of Surface Tension in The Liquid-Solid Interfaces of Lennard-Jones Liquids A.V. Lukyanov, A.E. LikhtmanSantisima TrinidadNo ratings yet
- Damage 99Document29 pagesDamage 99ing_costeroNo ratings yet
- Viscoelastic ModellingDocument18 pagesViscoelastic ModellingNimisha VedantiNo ratings yet
- CFD Finite Volume ReportDocument38 pagesCFD Finite Volume ReportRobert CookNo ratings yet
- Deformation and Flow of Solids: Colloqijium Madrid September 26-39, 1965 R. GrammelDocument14 pagesDeformation and Flow of Solids: Colloqijium Madrid September 26-39, 1965 R. GrammelSapari VelNo ratings yet
- Ifem Sroy 2013Document34 pagesIfem Sroy 2013Jeevananthan S P KannanNo ratings yet
- Berti Procesi DMJ11Document60 pagesBerti Procesi DMJ11Alba García RuizNo ratings yet
- REE IffusionDocument38 pagesREE IffusionLeillane BeatrizNo ratings yet
- Theory of Approximate Functional Equations: In Banach Algebras, Inner Product Spaces and Amenable GroupsFrom EverandTheory of Approximate Functional Equations: In Banach Algebras, Inner Product Spaces and Amenable GroupsNo ratings yet
- DOI 10.1007/s11223-019-00113-5: Keywords: Stress Relaxation, Compression, Silicone, Fuel CellDocument7 pagesDOI 10.1007/s11223-019-00113-5: Keywords: Stress Relaxation, Compression, Silicone, Fuel CellNam Huu TranNo ratings yet
- BF01134604Document8 pagesBF01134604Nam Huu TranNo ratings yet
- Mechanics of Soft Polymeric Materials Using A Fractal Viscoelastic ModelDocument14 pagesMechanics of Soft Polymeric Materials Using A Fractal Viscoelastic ModelNam Huu TranNo ratings yet
- Transversely Isotropic Magnetoactive Elastomers: Theory and ExperimentsDocument18 pagesTransversely Isotropic Magnetoactive Elastomers: Theory and ExperimentsNam Huu TranNo ratings yet
- RoutledgeHandbooks 9781315268057 Chapter3Document55 pagesRoutledgeHandbooks 9781315268057 Chapter3Nam Huu TranNo ratings yet
- (2007) A Thermal Degradation Mechanism of Polyvinyl Alcoholsilica NanocompositesDocument11 pages(2007) A Thermal Degradation Mechanism of Polyvinyl Alcoholsilica NanocompositesNam Huu TranNo ratings yet
- 1 s2.0 S0167663616301090 MainDocument6 pages1 s2.0 S0167663616301090 MainNam Huu TranNo ratings yet
- Relaxation Modulus in The Fitting of Polycarbonate and Poly (Vinyl Chloride) Viscoelastic Polymers by A Fractional Maxwell ModelDocument5 pagesRelaxation Modulus in The Fitting of Polycarbonate and Poly (Vinyl Chloride) Viscoelastic Polymers by A Fractional Maxwell ModelNam Huu TranNo ratings yet
- Evaluation of The Methods For Estimating The FullyDocument11 pagesEvaluation of The Methods For Estimating The FullyNam Huu TranNo ratings yet
- Fluids 06 00418 v2Document18 pagesFluids 06 00418 v2Nam Huu TranNo ratings yet
- Se 3 1 47Document12 pagesSe 3 1 47Nam Huu TranNo ratings yet
- Determination of Shear Behavior of Magneto-Rheological Elastomers Under Harmonic LoadingDocument22 pagesDetermination of Shear Behavior of Magneto-Rheological Elastomers Under Harmonic LoadingNam Huu TranNo ratings yet
- Magneto-Mechanical Characterization of Magnetorheological ElastomersDocument10 pagesMagneto-Mechanical Characterization of Magnetorheological ElastomersNam Huu TranNo ratings yet
- (2021, Dong) 3D Printing of Inherently Nanoporous Polymers Via Polymerization-Induced Phase SeparationDocument12 pages(2021, Dong) 3D Printing of Inherently Nanoporous Polymers Via Polymerization-Induced Phase SeparationNam Huu TranNo ratings yet
- (2015, Dimitri) Multimaterial Magnetically Assisted 3D Printing of Composite MaterialsDocument10 pages(2015, Dimitri) Multimaterial Magnetically Assisted 3D Printing of Composite MaterialsNam Huu TranNo ratings yet
- (2022, Mateos) Hybrid Magnetorheological Elastomers Enable Versatile Soft ActuatorsDocument14 pages(2022, Mateos) Hybrid Magnetorheological Elastomers Enable Versatile Soft ActuatorsNam Huu TranNo ratings yet
- (2020, Bien-Aime) Characterization of Hyperelastic Deformation Behavior of Rubber-Like MaterialsDocument10 pages(2020, Bien-Aime) Characterization of Hyperelastic Deformation Behavior of Rubber-Like MaterialsNam Huu TranNo ratings yet
- Capacitance Creep and Recovery Behavior of Magnetorheological ElastomersDocument12 pagesCapacitance Creep and Recovery Behavior of Magnetorheological ElastomersNam Huu TranNo ratings yet
- Creep Behavior of Magnetorheological GelsDocument10 pagesCreep Behavior of Magnetorheological GelsNam Huu TranNo ratings yet
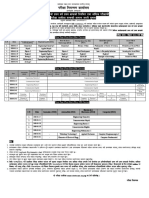
- .np5580uploadsnoticesDiploma20Level20First - First20 - Routine 2080 01 04 PDFDocument2 pages.np5580uploadsnoticesDiploma20Level20First - First20 - Routine 2080 01 04 PDFSunil ChhetriNo ratings yet
- Reporte Resumido PB LRFDDocument3 pagesReporte Resumido PB LRFDErick HurtadoNo ratings yet
- Buckling Restrained Braces-Numerichal ModelDocument17 pagesBuckling Restrained Braces-Numerichal ModelmocanuNo ratings yet
- Electromagnetic Field: PhysicsDocument8 pagesElectromagnetic Field: PhysicsholiNo ratings yet
- ASTM C1609 - Flexural Performance of FRC (Using Beam With Third-Point Loading) PDFDocument9 pagesASTM C1609 - Flexural Performance of FRC (Using Beam With Third-Point Loading) PDFAndresEduardoRenjifoRestrepoNo ratings yet
- NE200/NE300 N:) Jhiqfsgpsnbodf Wfdupsdpouspmesjwf) WDocument201 pagesNE200/NE300 N:) Jhiqfsgpsnbodf Wfdupsdpouspmesjwf) WGrootNo ratings yet
- Changing From Element WT% To Oxide WT%Document11 pagesChanging From Element WT% To Oxide WT%Reuben De BruynNo ratings yet
- D2167-15 Standard Test Method For Density and Unit Weight of Soil in Place by The Rubber Balloon Method PDFDocument6 pagesD2167-15 Standard Test Method For Density and Unit Weight of Soil in Place by The Rubber Balloon Method PDFBrahan Sevillano CelisNo ratings yet
- Curva AsfalticaDocument55 pagesCurva AsfalticaWilliam Francisco NIETO CONTRERASNo ratings yet
- Hyperbola-04 - ExerciseDocument16 pagesHyperbola-04 - ExerciseRaju SinghNo ratings yet
- Nonlinear Optics and ApplicationsDocument10 pagesNonlinear Optics and ApplicationsTilahun ArfichoNo ratings yet
- Sony DSC-H1 Service ManualDocument52 pagesSony DSC-H1 Service ManualVlad PANAITNo ratings yet
- Lifting TackleDocument30 pagesLifting TackleMohammad Abubakar SiddiqNo ratings yet
- Eastern 304 MCO 1964Document61 pagesEastern 304 MCO 1964GFNo ratings yet
- Swl2500e DatasheetDocument1 pageSwl2500e DatasheetZak zsNo ratings yet
- Discrete-Time Modeling of Induction Motors in Presence of Nonlinear Magnetic CharacteristicDocument7 pagesDiscrete-Time Modeling of Induction Motors in Presence of Nonlinear Magnetic CharacteristicYusufANo ratings yet
- JFE Structural SteelDocument38 pagesJFE Structural SteelboysitumeangNo ratings yet
- Brosur SEM EDX, Sputter CoaterDocument14 pagesBrosur SEM EDX, Sputter CoaterUjak KimiaNo ratings yet
- Damage Tolerence CertificateDocument48 pagesDamage Tolerence CertificateSaad AfzalNo ratings yet
- Mooring & AnchoringDocument27 pagesMooring & AnchoringMontu PatelNo ratings yet
- Sceince and Tech 3Document21 pagesSceince and Tech 3charudatta kelzarkarNo ratings yet
- Transformer Test ReportDocument2 pagesTransformer Test ReportAhmad AlshammariNo ratings yet
- Detailed Lesson Plan in Applied ElectricalDocument15 pagesDetailed Lesson Plan in Applied ElectricalJAMES M. MAYONo ratings yet
- MathematicsDocument3 pagesMathematicsSam SamNo ratings yet
- ODEs 2024Document18 pagesODEs 2024Ahtasham ArshadNo ratings yet
- Ca Foundation Integral CalculusDocument26 pagesCa Foundation Integral Calculusmeghnazara05No ratings yet
- Powers Sd2 Esr 2502Document13 pagesPowers Sd2 Esr 2502Juan Carlos VillalbaNo ratings yet
- Changan Cs15 WD en 8.1Document388 pagesChangan Cs15 WD en 8.1Paúl TorresNo ratings yet
- Brochure Bekaert 3 25 Jun 09 PDFDocument16 pagesBrochure Bekaert 3 25 Jun 09 PDFEmalaith BlackburnNo ratings yet