Download as pdf or txt
You might also like
- Step by Step Guide To Develop Outbound ABAP Proxy With PDF AttachmentDocument3 pagesStep by Step Guide To Develop Outbound ABAP Proxy With PDF AttachmentVenkatt PendyalaNo ratings yet
- A PDFDocument13 pagesA PDFMax MaxNo ratings yet
- Daa Master LabmanualDocument52 pagesDaa Master Labmanual21p61a6211No ratings yet
- Design and Analysis of Algorithms ManualDocument55 pagesDesign and Analysis of Algorithms ManualUpinder KaurNo ratings yet
- Introduction To Cad: Computer-Aided Design (Cad)Document47 pagesIntroduction To Cad: Computer-Aided Design (Cad)Ravi TarunNo ratings yet
- Unit 2: Algorithm (2 Hrs and Contains 3 Marks)Document6 pagesUnit 2: Algorithm (2 Hrs and Contains 3 Marks)Sarwesh MaharzanNo ratings yet
- 2022 - Solving Multiobjective Functions of Dynamics OptimizationDocument13 pages2022 - Solving Multiobjective Functions of Dynamics OptimizationRiri LestariNo ratings yet
- SCSA3015 Deep Learning Unit 3Document23 pagesSCSA3015 Deep Learning Unit 3pooja vikirthini100% (1)
- ADA Unit IDocument114 pagesADA Unit IAjal ShresthaNo ratings yet
- Chapter One 1. Fundamentals of Numerical Control: 1.1 Introduction To Computer Aided Design (CAD)Document24 pagesChapter One 1. Fundamentals of Numerical Control: 1.1 Introduction To Computer Aided Design (CAD)መሰረቴ ግርማይNo ratings yet
- DAA Lab ManualDocument52 pagesDAA Lab ManualVikas KumarNo ratings yet
- Week 2 - Problem Solving ConceptsDocument48 pagesWeek 2 - Problem Solving ConceptsAnnisa EryasniNo ratings yet
- PID5108657Document8 pagesPID5108657solifugae123No ratings yet
- Case Study 219302405Document14 pagesCase Study 219302405nishantjain2k03No ratings yet
- Dynamic Programming and ApplicationsDocument17 pagesDynamic Programming and ApplicationsSameer AhmadNo ratings yet
- Linear Regression Gradient Descent Vs Analytical SolutionDocument5 pagesLinear Regression Gradient Descent Vs Analytical Solutionyt peekNo ratings yet
- Genetic Algorithms in Computer Aided DesignDocument19 pagesGenetic Algorithms in Computer Aided Designnania.armandoNo ratings yet
- Chap02 MS HillerDocument5 pagesChap02 MS HillerHồ Huỳnh Xuân TrangNo ratings yet
- Introduction To Design Analysis & AlgorithmsDocument79 pagesIntroduction To Design Analysis & Algorithmsthrinayani yedhotiNo ratings yet
- Ijsetr Vol 2 Issue 3 676 683Document8 pagesIjsetr Vol 2 Issue 3 676 683kinfegetaNo ratings yet
- Unit 1 - Analysis Design of Algorithm - WWW - Rgpvnotes.inDocument17 pagesUnit 1 - Analysis Design of Algorithm - WWW - Rgpvnotes.inAD Aditya DubeyNo ratings yet
- Performance Analysis of Embedded Software Using Implicit Path EnumerationDocument14 pagesPerformance Analysis of Embedded Software Using Implicit Path EnumerationMd Zahid HossainNo ratings yet
- Computer Vision Graph Cuts: Exploring Graph Cuts in Computer VisionFrom EverandComputer Vision Graph Cuts: Exploring Graph Cuts in Computer VisionNo ratings yet
- Design and Analysis of Algorithms Dr. N. Subhash Chandra: Course ObjectivesDocument137 pagesDesign and Analysis of Algorithms Dr. N. Subhash Chandra: Course ObjectivesM Madhavi Asst. Professor, CSE, VRSECNo ratings yet
- A Genetic Algorithm Based Clustering Framework For Detection of Software Process Model CompatibilitiesDocument5 pagesA Genetic Algorithm Based Clustering Framework For Detection of Software Process Model CompatibilitiesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Basic Numerical Method Using Scilab-ID2069Document8 pagesBasic Numerical Method Using Scilab-ID2069Raul Alfonso Ocola GadeaNo ratings yet
- Seminar Report: Dryad: Distributed Data-Parallel Programs From Sequential Building Blocks andDocument7 pagesSeminar Report: Dryad: Distributed Data-Parallel Programs From Sequential Building Blocks andamrutadeshmukh222No ratings yet
- (PR4)Document7 pages(PR4)SoNamx TwoK-SFive SonAmxNo ratings yet
- Class Notes On Algorithms and FlowchartsDocument17 pagesClass Notes On Algorithms and FlowchartsDual HydranoidNo ratings yet
- Numerical Methodology of Mesh-Based Simulation TechniqueDocument5 pagesNumerical Methodology of Mesh-Based Simulation TechniqueInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- SOEN 6431 Winter 2011 - Program Slicing UpdatedDocument89 pagesSOEN 6431 Winter 2011 - Program Slicing UpdatedSokhal SinghNo ratings yet
- Machine Learning Question Paper Solved MLDocument55 pagesMachine Learning Question Paper Solved MLGim KadakNo ratings yet
- A Detailed Analysis of The Supervised Machine Learning AlgorithmsDocument5 pagesA Detailed Analysis of The Supervised Machine Learning AlgorithmsNIET Journal of Engineering & Technology(NIETJET)No ratings yet
- ACFrOgDVly789-6Z8jIbi7pBoLupubEgMyOp7PczEvUguHoW3uj oR2PKzDvuhRzzkIhacYjxXRrU6iA7sHt t6MhtpZFq0t uZL2pF5Ra NNZ kmcl5w7BCQeUegKhjRhNuou88XxLodzWwbsrDocument14 pagesACFrOgDVly789-6Z8jIbi7pBoLupubEgMyOp7PczEvUguHoW3uj oR2PKzDvuhRzzkIhacYjxXRrU6iA7sHt t6MhtpZFq0t uZL2pF5Ra NNZ kmcl5w7BCQeUegKhjRhNuou88XxLodzWwbsrJohn Steven LlorcaNo ratings yet
- Unit - 1: Question: Explain The Design Process With Computer and Without ComputerDocument17 pagesUnit - 1: Question: Explain The Design Process With Computer and Without Computerbrar352No ratings yet
- 17EE831 - Module - 3Document32 pages17EE831 - Module - 3Manish Kumar SahaniNo ratings yet
- Daa Unit 1Document24 pagesDaa Unit 1RajinithanuNo ratings yet
- Design and Analysis of Algorithms Reconsidered: ACM SIGCSE Bulletin March 2000Document6 pagesDesign and Analysis of Algorithms Reconsidered: ACM SIGCSE Bulletin March 2000Bandarapu shirishaNo ratings yet
- SpreadsheetDocument14 pagesSpreadsheetdotrongnhanNo ratings yet
- A Novel Design and Analysis of 4: 2 Compressors With Reduced Area Delay and PowerDocument15 pagesA Novel Design and Analysis of 4: 2 Compressors With Reduced Area Delay and PowerraghavNo ratings yet
- CADM Year Questions, Unit 4,5Document28 pagesCADM Year Questions, Unit 4,5Johnson PaulNo ratings yet
- Nassaj, Lienig Et Al. 2009 - A New Methodology For Constraint-DrivenDocument4 pagesNassaj, Lienig Et Al. 2009 - A New Methodology For Constraint-DrivensimNo ratings yet
- SCIP - A Framework To Integrate Constraint and Mixed Integer ProgrammingDocument29 pagesSCIP - A Framework To Integrate Constraint and Mixed Integer Programmingmhenley8059No ratings yet
- Towards The Development of An Efficient Optimization StrategyDocument51 pagesTowards The Development of An Efficient Optimization StrategyJawad BessedjerariNo ratings yet
- Intro To HypermeshDocument35 pagesIntro To HypermeshAryan GuptaNo ratings yet
- Lecturer - 3 Algorithm AnalysisDocument59 pagesLecturer - 3 Algorithm AnalysisSamiNo ratings yet
- WRPM Assessment AnsDocument4 pagesWRPM Assessment Ansbiramoabinet59No ratings yet
- 01 - DS and Algorithm - Session - 01.ppsDocument28 pages01 - DS and Algorithm - Session - 01.ppsscribeNo ratings yet
- SelfworkDocument8 pagesSelfworksg2133242No ratings yet
- 10.1515 - Jisys 2018 0273Document21 pages10.1515 - Jisys 2018 0273Nguyen Tran HieuNo ratings yet
- NAFEMDocument14 pagesNAFEMAuto RebarNo ratings yet
- Analysis of Algorithm (Summ)Document8 pagesAnalysis of Algorithm (Summ)Auwal AhmadNo ratings yet
- NEC ML UNIT-III Complete FinalDocument22 pagesNEC ML UNIT-III Complete FinalSamuelNo ratings yet
- Finite Element Method IntroDocument53 pagesFinite Element Method IntroNadheera SenasingheNo ratings yet
- DAA - Module 1Document45 pagesDAA - Module 11RN19CS033 Chidwan RameshNo ratings yet
- Unit I Introduction: CS640 2 - Design and Analysis of Algorithms - Unit I - 1.1Document20 pagesUnit I Introduction: CS640 2 - Design and Analysis of Algorithms - Unit I - 1.1Sathyendra Kumar VNo ratings yet
- cmsc451 Fall15 LectsDocument197 pagescmsc451 Fall15 LectsAnthony-Dimitri ANo ratings yet
- 451 2015 MergedDocument231 pages451 2015 MergedAnthony-Dimitri ANo ratings yet
- 21bci0353 - Aritra Ghosh (Ai-Da)Document7 pages21bci0353 - Aritra Ghosh (Ai-Da)Aritra GhoshNo ratings yet
- CH-2 Linear ProgrammingDocument69 pagesCH-2 Linear Programmingbelay mihreteNo ratings yet
- Optimal Selection and Allocation of SectionalizersDocument8 pagesOptimal Selection and Allocation of Sectionalizersabera alemayehuNo ratings yet
- Afmc16 Dfo CFD PDFDocument4 pagesAfmc16 Dfo CFD PDFdatam38No ratings yet
- ELPL-Final Copy 2016Document2 pagesELPL-Final Copy 2016Mohamed AbdelazizNo ratings yet
- ELPL-ADLY - Final 2015Document2 pagesELPL-ADLY - Final 2015Mohamed AbdelazizNo ratings yet
- Final Exam 2015 NewDocument7 pagesFinal Exam 2015 NewMohamed AbdelazizNo ratings yet
- 5 Fea CadDocument12 pages5 Fea CadMohamed AbdelazizNo ratings yet
- Elasticity ProblemsDocument5 pagesElasticity ProblemsMohamed AbdelazizNo ratings yet
- 4 Fea CadDocument10 pages4 Fea CadMohamed AbdelazizNo ratings yet
- Rosochowski1 2007 Al Fea IecapDocument11 pagesRosochowski1 2007 Al Fea IecapMohamed AbdelazizNo ratings yet
- DOC665105Document2 pagesDOC665105DeivisNo ratings yet
- Iub Data Configuration ATM (BSC6900V900R012)Document53 pagesIub Data Configuration ATM (BSC6900V900R012)tienpq150987No ratings yet
- Multilevel DC Link Inverter For Brushless Permanent Magnet Motors PDFDocument6 pagesMultilevel DC Link Inverter For Brushless Permanent Magnet Motors PDFAnonymous JyKrXZDXLGNo ratings yet
- Ict551 (Proposal) - Cambridge Sport ApplicationDocument7 pagesIct551 (Proposal) - Cambridge Sport ApplicationAmni SyamimiNo ratings yet
- Ite Eae 2024 Intake 2 Year Higher Nitec Entry RequirementsDocument8 pagesIte Eae 2024 Intake 2 Year Higher Nitec Entry RequirementsYee Jia EnNo ratings yet
- PI-PCS Interface PDFDocument111 pagesPI-PCS Interface PDFAlfredo Machado NetoNo ratings yet
- Instruction Manual For Action Replay™ Max & Action Replay™ Max Evo Edition For Use With The Playstation® 2 Game ConsoleDocument51 pagesInstruction Manual For Action Replay™ Max & Action Replay™ Max Evo Edition For Use With The Playstation® 2 Game Consoleshinsen100% (3)
- Galaxy S6 LTE (G920F) Application ListDocument8 pagesGalaxy S6 LTE (G920F) Application ListSomeone UserNo ratings yet
- Presentation of StatisticsDocument21 pagesPresentation of Statisticsarpit thakUrNo ratings yet
- Revision Module 5 PDFDocument5 pagesRevision Module 5 PDFavineshNo ratings yet
- IRDV 1245 ProgramingDocument5 pagesIRDV 1245 Programinggugal KumarNo ratings yet
- Eudravigilance Form B: Notification of Sponsor'S 'Legal Representative'Document2 pagesEudravigilance Form B: Notification of Sponsor'S 'Legal Representative'Muhammad Aulia RahmanNo ratings yet
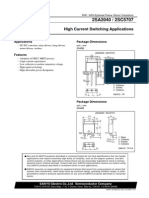
- 2SA2040 / 2SC5707: High Current Switching ApplicationsDocument5 pages2SA2040 / 2SC5707: High Current Switching ApplicationsJrsproulsNo ratings yet
- Mysql Architecture GuideDocument17 pagesMysql Architecture GuideKramer KramerNo ratings yet
- Root Cause Analysis Guideline PDFDocument28 pagesRoot Cause Analysis Guideline PDFvikrantchauhan11No ratings yet
- 1z0 347 Oracle Order ManagementDocument31 pages1z0 347 Oracle Order ManagementUdayraj SinghNo ratings yet
- A320 Ramp and Transit Ata 23 - CommunicationsDocument102 pagesA320 Ramp and Transit Ata 23 - CommunicationsCassiano CapellassiNo ratings yet
- Classification of 72 Melakartha Ragas Using PAM Clustering Method: Carnatic MusicDocument4 pagesClassification of 72 Melakartha Ragas Using PAM Clustering Method: Carnatic MusicVisvesh MNo ratings yet
- MCS 1 Cautare Pe NetDocument22 pagesMCS 1 Cautare Pe NetLoredana CiubotaruNo ratings yet
- Intel 8253 - Programmable Interval Timer: Difference Between 8253 and 8254Document4 pagesIntel 8253 - Programmable Interval Timer: Difference Between 8253 and 8254Suyash Sanjay SrivastavaNo ratings yet
- Isp Isg 453564935121Document346 pagesIsp Isg 453564935121shahine.joudNo ratings yet
- Kyle Albert Chanchico Estoesta - Module 11 STS Activity SheetDocument4 pagesKyle Albert Chanchico Estoesta - Module 11 STS Activity SheetKyle Albert EstoestaNo ratings yet
- Order Management and Fulfillment Implementation R13 - Activity GuideDocument151 pagesOrder Management and Fulfillment Implementation R13 - Activity Guidenarenc514No ratings yet
- Av500 Wiring Diagrams-Av501Document1 pageAv500 Wiring Diagrams-Av501Mary Sharlene IjanNo ratings yet
- Online Banking ManagementDocument15 pagesOnline Banking ManagementAshish TiwariNo ratings yet
- The Pipeline ModelDocument51 pagesThe Pipeline ModelNicolás PortaNo ratings yet
- 88 IELTS Speaking Part 2 Cue Cards With Audio Final-4-94 2Document91 pages88 IELTS Speaking Part 2 Cue Cards With Audio Final-4-94 2Nedarafiei100% (1)
- Grimoire of The Troll v1.0Document100 pagesGrimoire of The Troll v1.0Daemyn50% (2)