Download as pdf or txt
You might also like
- IOT Based Social Distancing and Monitoring Robot For QueueDocument8 pagesIOT Based Social Distancing and Monitoring Robot For QueueIJRASETPublicationsNo ratings yet
- Obstacle Avoiding CarDocument6 pagesObstacle Avoiding CarIJRASETPublicationsNo ratings yet
- Solar Agricultural Sprayer RobotDocument8 pagesSolar Agricultural Sprayer RobotIJRASETPublicationsNo ratings yet
- Solar Agricultural Sprayer RobotDocument7 pagesSolar Agricultural Sprayer RobotIJRASETPublicationsNo ratings yet
- Automatic Domestic Vaccum CleanerDocument5 pagesAutomatic Domestic Vaccum CleanerIJRASETPublicationsNo ratings yet
- War Field Spying Robot With Wireless CameraDocument8 pagesWar Field Spying Robot With Wireless CameraIJRASETPublicationsNo ratings yet
- Warehouse Management BOT Using ArduinoDocument6 pagesWarehouse Management BOT Using ArduinoIJRASETPublicationsNo ratings yet
- Gesture Controlled Robot With Robotic ArmDocument10 pagesGesture Controlled Robot With Robotic ArmIJRASETPublicationsNo ratings yet
- MEMS Accelerometer Based Hand Gesture-Controlled RobotDocument5 pagesMEMS Accelerometer Based Hand Gesture-Controlled RobotIJRASETPublicationsNo ratings yet
- Sensor Based Motion Control of Mobile Car RobotDocument36 pagesSensor Based Motion Control of Mobile Car RobotDinesh KumarNo ratings yet
- Dr. Ambedkar Institute of Technology: Under The Guidance ofDocument6 pagesDr. Ambedkar Institute of Technology: Under The Guidance ofSushanth KengunteNo ratings yet
- Voice Controlled RobotDocument7 pagesVoice Controlled RobotIJRASETPublicationsNo ratings yet
- IJRTI2304047Document4 pagesIJRTI2304047Himanshu KumarNo ratings yet
- Hand Gesture-Controlled Robotic Arm With All-Terrain Surveillance CarDocument7 pagesHand Gesture-Controlled Robotic Arm With All-Terrain Surveillance CarIJRASETPublicationsNo ratings yet
- Line Following Robot ResearchDocument4 pagesLine Following Robot ResearchtherealslimNo ratings yet
- Gesture Replication Robo-ArmDocument10 pagesGesture Replication Robo-ArmIJRASETPublicationsNo ratings yet
- Iot Based Surveillance Robot IJERTV7IS030061Document5 pagesIot Based Surveillance Robot IJERTV7IS030061rgkusumbaNo ratings yet
- 66 20 GestureDocument8 pages66 20 GestureAfsin RabbaniNo ratings yet
- IOT Based Arm RobotDocument6 pagesIOT Based Arm RobotIJRASETPublicationsNo ratings yet
- Hand Gestureand Voice Controlled Smart VehicleDocument5 pagesHand Gestureand Voice Controlled Smart VehicleSAHITHLAL HOWDEKARNo ratings yet
- Gesture-Controlled Surveillance CarDocument10 pagesGesture-Controlled Surveillance CarIJRASETPublicationsNo ratings yet
- Robotic Vehicle Movement and Arm ControlDocument6 pagesRobotic Vehicle Movement and Arm ControlMarília PioNo ratings yet
- IoT Based Smart Multi Application SurveillanceDocument5 pagesIoT Based Smart Multi Application SurveillanceVundi Sri Harsha100% (1)
- Design and Implementation of A Wireless Gesture Controlled Robotic Arm With VisionDocument8 pagesDesign and Implementation of A Wireless Gesture Controlled Robotic Arm With VisionAli Najim Al-AskariNo ratings yet
- Hand Gesture Recognition Bomb Diffusing Surveillance Robot 1Document1 pageHand Gesture Recognition Bomb Diffusing Surveillance Robot 1Dinesh Padma Rao KadiyamNo ratings yet
- Smartphone Controlled Robotic Vehicle With Unique Bearing Alignment Mechanism and Robotic Arm For Dangerous Object DisposalDocument6 pagesSmartphone Controlled Robotic Vehicle With Unique Bearing Alignment Mechanism and Robotic Arm For Dangerous Object DisposalEditor IJTSRDNo ratings yet
- IRJET - Gesture Controlled Robot With Obs PDFDocument3 pagesIRJET - Gesture Controlled Robot With Obs PDFCarina FelnecanNo ratings yet
- Multipurpose Robotic ArmDocument7 pagesMultipurpose Robotic ArmIJRASETPublicationsNo ratings yet
- Fin Irjmets1682969720Document7 pagesFin Irjmets1682969720aryanNo ratings yet
- Physio Arm Control For Patient Using IOT TechnologyDocument5 pagesPhysio Arm Control For Patient Using IOT TechnologyIJRASETPublicationsNo ratings yet
- Jeta V3i3p101Document3 pagesJeta V3i3p101Slakshmi NarayanaNo ratings yet
- Jornal IjaertDocument9 pagesJornal IjaertVarun SharmaNo ratings yet
- CSE JournalsDocument12 pagesCSE Journalsgraphic designerNo ratings yet
- A Review On Robotic Arm Vehicle With Object and Facial RecognitionDocument7 pagesA Review On Robotic Arm Vehicle With Object and Facial RecognitionijrasetNo ratings yet
- R L Jalappa Institute of Technology: "Robotic Arm Controlled Using IOT Applications"Document15 pagesR L Jalappa Institute of Technology: "Robotic Arm Controlled Using IOT Applications"Gunavardhanareddy ChinnaNo ratings yet
- Micro RobotDocument5 pagesMicro RobotIJRASETPublicationsNo ratings yet
- Hand Gesture Recognition and Cleaning RobotDocument8 pagesHand Gesture Recognition and Cleaning RobotIJRASETPublicationsNo ratings yet
- Abstract-This Paper Presents A Design of Controlled RoboticDocument2 pagesAbstract-This Paper Presents A Design of Controlled RoboticMOURANI BHARNo ratings yet
- Voice Controlled Robot Vehicle Using ArduinoDocument8 pagesVoice Controlled Robot Vehicle Using ArduinoIJRASETPublicationsNo ratings yet
- Robotic Arm Control Through Mimicking of Miniature Robotic ArmDocument7 pagesRobotic Arm Control Through Mimicking of Miniature Robotic Armbendali nadirNo ratings yet
- A Study On Gesture Control Ardiuno RobotDocument8 pagesA Study On Gesture Control Ardiuno RobotElakkiya DasanNo ratings yet
- Review Paper On Gesture Controlled Robotic Arm Using IoTDocument2 pagesReview Paper On Gesture Controlled Robotic Arm Using IoTInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Spy RobotDocument7 pagesSpy RobotIJRASETPublicationsNo ratings yet
- BTech Synopsis ConferenceDocument6 pagesBTech Synopsis ConferenceVikas BankarNo ratings yet
- Machine Learning Inspired Smart Agriculture System With Crop PredictionDocument9 pagesMachine Learning Inspired Smart Agriculture System With Crop PredictionIJRASETPublicationsNo ratings yet
- Irjet V7i41048Document2 pagesIrjet V7i41048Harsh mouryNo ratings yet
- Design and Implementation of Haptic Prosthetic Hand For Realization of Intuitive OperationDocument9 pagesDesign and Implementation of Haptic Prosthetic Hand For Realization of Intuitive OperationIJRASETPublicationsNo ratings yet
- Joystick Controlled Industrial Robotic System With Robotic ArmDocument5 pagesJoystick Controlled Industrial Robotic System With Robotic ArmSanjeev KumarNo ratings yet
- Design and Implementation of Gesture Controlled Robotic Arm For Industrial Applications1Document9 pagesDesign and Implementation of Gesture Controlled Robotic Arm For Industrial Applications1Akhilesh YadavNo ratings yet
- Obstacle Avoiding Robot A ReviewDocument6 pagesObstacle Avoiding Robot A ReviewIJRASETPublicationsNo ratings yet
- Robotic Arm: MimickingDocument5 pagesRobotic Arm: MimickingMaitriya DamaniNo ratings yet
- Icmmpe DuetDocument7 pagesIcmmpe DuetSroyNo ratings yet
- Gesture Control of Robotic Arm: Institute of Research AdvancesDocument9 pagesGesture Control of Robotic Arm: Institute of Research AdvancesaarthiNo ratings yet
- IoT Based Floor Cleaning RobotDocument6 pagesIoT Based Floor Cleaning RobotIJRASETPublicationsNo ratings yet
- Military Spying and Bomb Disposal Robot With Night VisionDocument5 pagesMilitary Spying and Bomb Disposal Robot With Night VisionAniket PawadeNo ratings yet
- Humanoid Robot Using Robotic ArmDocument7 pagesHumanoid Robot Using Robotic ArmIJRASETPublicationsNo ratings yet
- G9. FYP ProposalDocument9 pagesG9. FYP ProposalSaqlain 6No ratings yet
- JETIR1804103Document6 pagesJETIR1804103Himanshu KumarNo ratings yet
- RFID Enabled Smart Data Analysis in A Smart WarehoDocument8 pagesRFID Enabled Smart Data Analysis in A Smart WarehoEvilneko1No ratings yet
- Konecranes Brochure Rubber Tyred Gantry Crane English 201003Document2 pagesKonecranes Brochure Rubber Tyred Gantry Crane English 201003Eyad OsNo ratings yet
- English-1 MergedDocument48 pagesEnglish-1 MergedEshaan KuttikadNo ratings yet
- Peeyush Project FinalDocument27 pagesPeeyush Project Finalathul manojNo ratings yet
- D60 Line Distance Relay: Instruction ManualDocument442 pagesD60 Line Distance Relay: Instruction ManualyaneiroNo ratings yet
- Manipal Institute of TechnologyDocument5 pagesManipal Institute of TechnologyEswar RajeshNo ratings yet
- Avr 2809ci Om e - 102aDocument102 pagesAvr 2809ci Om e - 102adsohaydaNo ratings yet
- SAP SD - Copy Control SettingsDocument6 pagesSAP SD - Copy Control SettingsHarish KumarNo ratings yet
- 4100ES With IDNAC Addressable Fire Detection and Control Basic Panel Modules and Accessories FeaturesDocument14 pages4100ES With IDNAC Addressable Fire Detection and Control Basic Panel Modules and Accessories FeaturesdennisflorianNo ratings yet
- TR AppDocument12 pagesTR AppK POP SUCKSNo ratings yet
- LSMW ProcedureDocument20 pagesLSMW Procedureguru_3112No ratings yet
- Enhanced Performance Architecture (EPA)Document1 pageEnhanced Performance Architecture (EPA)alvin meNo ratings yet
- SDLG Brochure en 2022 g9220fDocument4 pagesSDLG Brochure en 2022 g9220falatberat sparepartNo ratings yet
- Management Support Systems - Knowledge Acquisition, Representation, and ReasoningDocument46 pagesManagement Support Systems - Knowledge Acquisition, Representation, and ReasoningDr Rushen SinghNo ratings yet
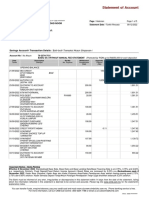
- Statement of Account: No 15 Jalan Awana 12 Taman Cheras Awana 43200 Batu 9 Cheras, SelangorDocument5 pagesStatement of Account: No 15 Jalan Awana 12 Taman Cheras Awana 43200 Batu 9 Cheras, Selangorputri nurishaNo ratings yet
- Fcto State of States 2014 1Document82 pagesFcto State of States 2014 1Pablo SanzNo ratings yet
- DENELI CAN Smart Manual InstructionsDocument11 pagesDENELI CAN Smart Manual InstructionsatvbgdNo ratings yet
- Pro Mern Stack Full StackDocument1 pagePro Mern Stack Full StackJayadrata Middey0% (1)
- 6.4.3.4 Packet Tracer - Troubleshooting Default Gateway Issues - CCNA v6.0 Exam 2019Document11 pages6.4.3.4 Packet Tracer - Troubleshooting Default Gateway Issues - CCNA v6.0 Exam 2019Kealeboga Elliott KealebogaNo ratings yet
- ENUSA CG3567 CMX Og 201403Document328 pagesENUSA CG3567 CMX Og 201403Срђан СокићNo ratings yet
- Manual Digitrip 3000Document66 pagesManual Digitrip 3000adicto001No ratings yet
- Session 1 - Components and Process of CommunicationDocument36 pagesSession 1 - Components and Process of CommunicationPRATEEK JAGGI100% (1)
- BBM 212 - Principles of Marketing Class Notes PDFDocument85 pagesBBM 212 - Principles of Marketing Class Notes PDFrichard murage100% (2)
- Booster Pump Capacity CalculationDocument29 pagesBooster Pump Capacity CalculationARUL SANKARANNo ratings yet
- DSL Cpe ConfigDocument11 pagesDSL Cpe ConfigMario NikićNo ratings yet
- 8 IoT Based Smart Fish Farming Aquaculture Monitoring System Sohail Karim 3461Document9 pages8 IoT Based Smart Fish Farming Aquaculture Monitoring System Sohail Karim 3461Md Bulbul AhmedNo ratings yet
- TEch File U8U8ADocument30 pagesTEch File U8U8AAilen LazarteNo ratings yet
- Slip-In Cartridge Valves LunchBox SessionsDocument5 pagesSlip-In Cartridge Valves LunchBox SessionsNguyễn ĐạtNo ratings yet
- UAV Outback Challenge RulesDocument19 pagesUAV Outback Challenge RulesUAVs AustraliaNo ratings yet
- Metalux: Interactive Menu Product CertificationDocument4 pagesMetalux: Interactive Menu Product Certificationluis alberto moralesNo ratings yet
- Manual Do Usuário I-Modo Mp3: Unique FeaturesDocument3 pagesManual Do Usuário I-Modo Mp3: Unique FeaturesMarcelo BertNo ratings yet