Download as docx, pdf, or txt
You might also like
- SERVOPRO 4000 Series - Service ManualDocument190 pagesSERVOPRO 4000 Series - Service ManualGuillermo Zapata100% (1)
- Compact Mobility Unit R21Document8 pagesCompact Mobility Unit R21SfvvNo ratings yet
- Automatic Generation Control Using Fuzzy Control: Dept of E&E, Vvce, MysoreDocument20 pagesAutomatic Generation Control Using Fuzzy Control: Dept of E&E, Vvce, MysoreAbhishek K NageshNo ratings yet
- Raw Material Handling Plant: Download The Original AttachmentDocument36 pagesRaw Material Handling Plant: Download The Original AttachmentJaved AlamNo ratings yet
- 4주차 1 Intro FuzzyDocument37 pages4주차 1 Intro FuzzySai NavaneetNo ratings yet
- Steps in Fuzzy Logic EstimationDocument13 pagesSteps in Fuzzy Logic Estimationoloyede_wole3741No ratings yet
- The International Journal of Engineering and Science (The IJES)Document6 pagesThe International Journal of Engineering and Science (The IJES)theijesNo ratings yet
- Introduction To Fuzzy Logic SystemDocument15 pagesIntroduction To Fuzzy Logic SystemJoy SrkrNo ratings yet
- Decision Making in Next Generation Networks Using Fuzzy SystemsDocument7 pagesDecision Making in Next Generation Networks Using Fuzzy SystemsHormoz ParsianNo ratings yet
- Towards Smooth Monotonicity in Fuzzy Inference System Based On Gradual Generalized Modus PonensDocument8 pagesTowards Smooth Monotonicity in Fuzzy Inference System Based On Gradual Generalized Modus PonensSAAYAANTAAN NITNo ratings yet
- Speed ControlDocument4 pagesSpeed ControlArfa ShaikhNo ratings yet
- Xiachangliang 4 PDFDocument8 pagesXiachangliang 4 PDFMd Mustafa KamalNo ratings yet
- Design & Implementation of Mamdani Fuzzy Inference System On An Automatic Train Braking SystemDocument5 pagesDesign & Implementation of Mamdani Fuzzy Inference System On An Automatic Train Braking SystemijsretNo ratings yet
- Mamdani and SugenoDocument9 pagesMamdani and Sugenoanilshaw27No ratings yet
- Combined Fuzzy-Logic Wavelet-Based Fault Classification Technique For Power System RelayingDocument8 pagesCombined Fuzzy-Logic Wavelet-Based Fault Classification Technique For Power System Relayingوليد موسىNo ratings yet
- Fuzzy Final Report Washing MachineDocument20 pagesFuzzy Final Report Washing MachineNay Min AungNo ratings yet
- Part B NeurofuzzyDocument4 pagesPart B Neurofuzzykarthicgroup3272No ratings yet
- Fuzzy TheoriesDocument11 pagesFuzzy TheoriesÃh JáçkNo ratings yet
- Application of Fuzzy Logic in Antilock Braking SystemDocument7 pagesApplication of Fuzzy Logic in Antilock Braking SystemRohit YadavNo ratings yet
- Fuzzy Logic Control Method For The Washing Time of The Washing Machine Final Project ReportDocument20 pagesFuzzy Logic Control Method For The Washing Time of The Washing Machine Final Project ReportNay Min AungNo ratings yet
- Indecs2014 pp245 254Document10 pagesIndecs2014 pp245 254arnold chefguezzanaNo ratings yet
- Fuzzy Logic Automatic Braking System in TrainsDocument10 pagesFuzzy Logic Automatic Braking System in Trainsvaalgatamilram100% (1)
- 03 Fuzzy Inference Systems PDFDocument7 pages03 Fuzzy Inference Systems PDFponpisutNo ratings yet
- Final Report Automatic Brake System Using Fuzzy LogicDocument17 pagesFinal Report Automatic Brake System Using Fuzzy LogicFor BooksNo ratings yet
- Fuzzy Controlled Anti-Lock Braking SystemDocument14 pagesFuzzy Controlled Anti-Lock Braking SystemBIKASH BHASKARNo ratings yet
- ANFIS Roger YangDocument21 pagesANFIS Roger YangarellanoruizNo ratings yet
- Bulanik SozlukDocument3 pagesBulanik Sozlukeyp86No ratings yet
- Speed Control of Separately Excited DC Motor byDocument21 pagesSpeed Control of Separately Excited DC Motor bypriyanshu0% (1)
- Fuzzy Logic PDFDocument11 pagesFuzzy Logic PDFsandyNo ratings yet
- Unsupervised ANNDocument14 pagesUnsupervised ANNAisha SinghNo ratings yet
- Predicting Alzheimer's Disease: A Neuroimaging Study With 3D Convolutional Neural NetworksDocument21 pagesPredicting Alzheimer's Disease: A Neuroimaging Study With 3D Convolutional Neural NetworksΒάσιλης ΝτάτηςNo ratings yet
- Fuzzy Remote Control of A DC DriveDocument18 pagesFuzzy Remote Control of A DC Drivejames1823No ratings yet
- Fuzzy Controlled Anti-Lock Braking SystemDocument10 pagesFuzzy Controlled Anti-Lock Braking SystemPreeti BhamreNo ratings yet
- Graph Regularized Feature Selection With Data ReconstructionDocument10 pagesGraph Regularized Feature Selection With Data ReconstructionTechnos_IncNo ratings yet
- DEZG611 - Dynamics and Vibrations Lab - ExamDocument25 pagesDEZG611 - Dynamics and Vibrations Lab - Exammallikarjunt12345No ratings yet
- Chapter - 1: 1.1 OverviewDocument50 pagesChapter - 1: 1.1 Overviewkarthik0484No ratings yet
- Power System StabilityDocument20 pagesPower System StabilityMani KantaNo ratings yet
- Age Prediction and Performance Comparison by Adaptive Network Based Fuzzy Inference System Using Subtractive ClusteringDocument5 pagesAge Prediction and Performance Comparison by Adaptive Network Based Fuzzy Inference System Using Subtractive ClusteringthesijNo ratings yet
- A N A NN A Pproach For N Etwork I Ntrusion D Etection U Sing e Ntropy B Ased F Eature SelectionDocument15 pagesA N A NN A Pproach For N Etwork I Ntrusion D Etection U Sing e Ntropy B Ased F Eature SelectionAIRCC - IJNSANo ratings yet
- 1.tugas Pneumatik (B.inngris)Document11 pages1.tugas Pneumatik (B.inngris)Daud VamboedieNo ratings yet
- Fuzzy LogicDocument16 pagesFuzzy LogicDragatoNo ratings yet
- Congestion Control Mechanismusing Fuzzy LogicDocument6 pagesCongestion Control Mechanismusing Fuzzy LogicInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Obstacle Avoidance Based On Fuzzy LogicDocument5 pagesObstacle Avoidance Based On Fuzzy LogicMarcAlomarPayerasNo ratings yet
- TSK Fuzzy Function ApproximatorsDocument11 pagesTSK Fuzzy Function ApproximatorsAdam KliberNo ratings yet
- Methods of FISDocument3 pagesMethods of FISPrakshep GoswamiNo ratings yet
- Paper Documentation of Fuzzy Logic B12Document8 pagesPaper Documentation of Fuzzy Logic B12SharikaNo ratings yet
- Toward Techniques For Auto-Tuning GPU Algorithms: Abstract. We Introduce A Variety of Techniques Toward Autotuning DataDocument10 pagesToward Techniques For Auto-Tuning GPU Algorithms: Abstract. We Introduce A Variety of Techniques Toward Autotuning Datade7yT3izNo ratings yet
- System Identification Using Intelligent AlgorithmsDocument13 pagesSystem Identification Using Intelligent AlgorithmsAnonymous gJHAwzENo ratings yet
- System Modeling Using A Mamdani Rule Base: University of FloridaDocument7 pagesSystem Modeling Using A Mamdani Rule Base: University of FloridaValy AndyNo ratings yet
- Parameter SelectionDocument6 pagesParameter SelectionjebileeNo ratings yet
- Routing Algorithm Simulators: Buket Bozkurt and Yilmaz ÇamurcuDocument13 pagesRouting Algorithm Simulators: Buket Bozkurt and Yilmaz ÇamurcuNarayani PonnaNo ratings yet
- Automatic ControlDocument14 pagesAutomatic Controlmagdi elmalekNo ratings yet
- European Journal of Electrical Engineering: Received: 10 April 2019 Accepted: 28 May 2019Document5 pagesEuropean Journal of Electrical Engineering: Received: 10 April 2019 Accepted: 28 May 2019BENZIANE MouradNo ratings yet
- Fuzzy Logic ControllerDocument4 pagesFuzzy Logic ControllerSalma KhanNo ratings yet
- STLFDocument2 pagesSTLFAaditya BaidNo ratings yet
- WEEK 3: Deep Learning: 2. Why SVM Is An Example of A Large Margin Classifier? (3 Marks)Document8 pagesWEEK 3: Deep Learning: 2. Why SVM Is An Example of A Large Margin Classifier? (3 Marks)Mrunal BhilareNo ratings yet
- 3 Implementation of Fuzzy Logic Control Systems: 3.1 OverviewDocument16 pages3 Implementation of Fuzzy Logic Control Systems: 3.1 Overviewjunior_moschen9663No ratings yet
- Train Braking Distance Calculation Using Fuzzy LogicDocument11 pagesTrain Braking Distance Calculation Using Fuzzy LogicMilan MilosavljevicNo ratings yet
- DM ReportDocument12 pagesDM ReportNikhilLinSaldanhaNo ratings yet
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- Radial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksFrom EverandRadial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksNo ratings yet
- Motion Estimation: Advancements and Applications in Computer VisionFrom EverandMotion Estimation: Advancements and Applications in Computer VisionNo ratings yet
- Thesis On Fractal Antenna DesignDocument5 pagesThesis On Fractal Antenna Designgj9zvt51100% (3)
- Lecture 4 - Generator Set SizingDocument40 pagesLecture 4 - Generator Set Sizingjimmy_barredoNo ratings yet
- CPE MIKROTIK RBSXTR&R11e-4G-SXT 4G Kit Cat4 FDD LTE BAND 31Document2 pagesCPE MIKROTIK RBSXTR&R11e-4G-SXT 4G Kit Cat4 FDD LTE BAND 31Sergio SanchezNo ratings yet
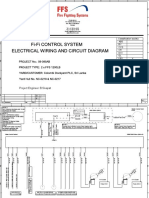
- Electrical Wiring and Circuit Diagram Fi-Fi Control SystemDocument16 pagesElectrical Wiring and Circuit Diagram Fi-Fi Control SystemDamithaNo ratings yet
- 10 PhysicsDocument4 pages10 PhysicsNicka Asereht MinaNo ratings yet
- New Approach To The Characterisation of Petroleum Mixtures Used in The Modelling of Separation ProcessesDocument14 pagesNew Approach To The Characterisation of Petroleum Mixtures Used in The Modelling of Separation ProcessesHerbert SenzanoNo ratings yet
- Balancing Hard To Balance Equations PDFDocument2 pagesBalancing Hard To Balance Equations PDFVinlax ArguillesNo ratings yet
- Rohs-6 Compliant 10Gb/S 10Km 1310Nm Single Mode Datacom SFP+ Transceiver Ftlx1475D3BtlDocument12 pagesRohs-6 Compliant 10Gb/S 10Km 1310Nm Single Mode Datacom SFP+ Transceiver Ftlx1475D3Btlmoises quispeNo ratings yet
- Gemini Photo Digitizer v.X9 - User ManualDocument65 pagesGemini Photo Digitizer v.X9 - User ManualTraian LucaNo ratings yet
- Ottankadu - Punalvasal - SafeDocument6 pagesOttankadu - Punalvasal - SafeRenugopalNo ratings yet
- Special Functions of Mathematical Physics A Unified Introduction With Applications by Arnold F Nikiforov, Vasilii B UvarovDocument443 pagesSpecial Functions of Mathematical Physics A Unified Introduction With Applications by Arnold F Nikiforov, Vasilii B UvarovEducación GratisNo ratings yet
- GSA AbilityDocument27 pagesGSA AbilityAqsa TariqNo ratings yet
- db2 Perf Tune 115Document702 pagesdb2 Perf Tune 115TrurlScribd100% (1)
- Intro To QPDocument30 pagesIntro To QPdkffgufxxaybfhqzizNo ratings yet
- Abacus Plus Hematology Analyzer - Service ManualDocument97 pagesAbacus Plus Hematology Analyzer - Service ManualMed KerroumNo ratings yet
- Parts of Speech Auto Saved)Document28 pagesParts of Speech Auto Saved)Lady Amor Telompros PeroteNo ratings yet
- Lenze ESMD 230VDocument23 pagesLenze ESMD 230VNenad MarticNo ratings yet
- Speed and Position Sensors HandoutDocument16 pagesSpeed and Position Sensors HandoutJose Ramón Orenes ClementeNo ratings yet
- LICENSE4J License Manager User GuideDocument70 pagesLICENSE4J License Manager User Guidejay4120No ratings yet
- DLL Math Grade2 Quarter1 Week2Document8 pagesDLL Math Grade2 Quarter1 Week2SRANo ratings yet
- Life Skills-II (Aptitude) Prtice Sheet-1 (CO1)Document7 pagesLife Skills-II (Aptitude) Prtice Sheet-1 (CO1)Kunal MansukhaniNo ratings yet
- Sample Questions: SAS Visual Analytics Exploration and DesignDocument6 pagesSample Questions: SAS Visual Analytics Exploration and DesignAnisah NiesNo ratings yet
- Java Notes - CSE - BDocument54 pagesJava Notes - CSE - Budar_purohitNo ratings yet
- Experiment No. 1Document7 pagesExperiment No. 1Judith LacapNo ratings yet
- 10 1002@14356007 A27049Document34 pages10 1002@14356007 A27049Adam Septiyono ArlanNo ratings yet
- Zoom Timetable BFC KahutaDocument5 pagesZoom Timetable BFC KahutaYumna ArOojNo ratings yet
- Chastotnii Preobrazovatel Sunfar E300 Manual enDocument17 pagesChastotnii Preobrazovatel Sunfar E300 Manual enTamil SelvanNo ratings yet