
Cable-Membrane Literature and Work Report - RT
Cable-Membrane Literature and Work Report - RT
You might also like
- TibertLicThesis-Numerical Analyses of Cable Roof StructuresDocument196 pagesTibertLicThesis-Numerical Analyses of Cable Roof Structuresngoc_ptt100% (1)
- Portfolio Cable Membrane Design Report RTDocument34 pagesPortfolio Cable Membrane Design Report RTKon KritNo ratings yet
- Scientific ManualDocument42 pagesScientific ManualLeonardo TejedorNo ratings yet
- A Technology For Designing Tensegrity Domes and SpheresDocument31 pagesA Technology For Designing Tensegrity Domes and SpheresIrmantas SauliusNo ratings yet
- Handbook in Operations Research and Management ScienceDocument78 pagesHandbook in Operations Research and Management SciencebangiebangieNo ratings yet
- Scientific Reference Manual - v1.0Document42 pagesScientific Reference Manual - v1.0Jeric Dela Cruz QuiminalesNo ratings yet
- Full Text 01Document69 pagesFull Text 01Rohit LauvanshiNo ratings yet
- Final Project Finite Element AnalysisDocument41 pagesFinal Project Finite Element AnalysisAkhil KapoorNo ratings yet
- Finite Element Methods I Finite Element Analysis of RCC BeamDocument10 pagesFinite Element Methods I Finite Element Analysis of RCC BeamphucNo ratings yet
- Wrinkling of Membrane Structure: Sarvesh KumarDocument32 pagesWrinkling of Membrane Structure: Sarvesh KumarSarvesh KulhariNo ratings yet
- Bhatkar (2015) - Finite Element Analysis of Crane Hook and Optimization Using Taguchi ApproachDocument5 pagesBhatkar (2015) - Finite Element Analysis of Crane Hook and Optimization Using Taguchi ApproachGogyNo ratings yet
- Ramaite Mbuso Fikile 2013Document87 pagesRamaite Mbuso Fikile 2013Saby Lisbeth Eugenio PonceNo ratings yet
- Post-Tensioned Stress Ribbon Systems in Long-Span Roofs: Samih Ahmed Guayente MinchotDocument150 pagesPost-Tensioned Stress Ribbon Systems in Long-Span Roofs: Samih Ahmed Guayente MinchotSonamNo ratings yet
- Glulam Shear Frame and CLT Shear WallDocument192 pagesGlulam Shear Frame and CLT Shear WallLuis del CidNo ratings yet
- Full Text 01Document79 pagesFull Text 01jorge reisNo ratings yet
- Engineering Analysis of Tension Structures Theory and PracticeDocument11 pagesEngineering Analysis of Tension Structures Theory and PracticeNora AngelicaNo ratings yet
- Applications of Metaheuristic Optimization PDFDocument381 pagesApplications of Metaheuristic Optimization PDFمحمد حمديNo ratings yet
- Design and Modeling of InductorsNPAryanDocument88 pagesDesign and Modeling of InductorsNPAryanJoe MullerNo ratings yet
- FinalProject PDFDocument91 pagesFinalProject PDFAlessandro MuragliaNo ratings yet
- A Hybrid Cavity and Parallel-Plate PEEC Method For Analysis of CoDocument69 pagesA Hybrid Cavity and Parallel-Plate PEEC Method For Analysis of CoAparna KannanNo ratings yet
- Nonlinear Finite Element Analysis of RC Shell StructureDocument44 pagesNonlinear Finite Element Analysis of RC Shell Structureshashi mauyasNo ratings yet
- Brendan Duffy Senior Design Report 2b1wvxzDocument12 pagesBrendan Duffy Senior Design Report 2b1wvxzmuhammet mutluNo ratings yet
- CaiM032018D Final Version Fromgraduate School 20180322Document160 pagesCaiM032018D Final Version Fromgraduate School 20180322CopperNo ratings yet
- Optical Fibres: Analysis, Numerical Modelling and OptimisationDocument187 pagesOptical Fibres: Analysis, Numerical Modelling and OptimisationRahul ChoudharyNo ratings yet
- Numerical Analyses of Cable Roof Structures - Gunnar TibertDocument196 pagesNumerical Analyses of Cable Roof Structures - Gunnar TibertjorgetstcalderonNo ratings yet
- CYPE CONNECT-Calculations Report PDFDocument16 pagesCYPE CONNECT-Calculations Report PDFAHMAD BALFAQIHNo ratings yet
- HV CablesDocument100 pagesHV Cableso14657No ratings yet
- Hfs CvtyDocument68 pagesHfs CvtyVladeta JevremovićNo ratings yet
- D21fa H00345936Document18 pagesD21fa H00345936jqwj1292No ratings yet
- Perfectly Matched Layers For Second Order Wave Equations: IT Licentiate Theses 2010-004Document46 pagesPerfectly Matched Layers For Second Order Wave Equations: IT Licentiate Theses 2010-004jesus1843No ratings yet
- Non Linear Assessment of A Concrete Slab Bridge Loaded To FailureDocument118 pagesNon Linear Assessment of A Concrete Slab Bridge Loaded To FailuremustafaNo ratings yet
- Selamawit DegeDocument95 pagesSelamawit DegeSultan MohammedNo ratings yet
- Computational Fluid Dynamics Assignment 2Document20 pagesComputational Fluid Dynamics Assignment 2AYUSH RAINo ratings yet
- Moncrieff 97Document10 pagesMoncrieff 97Ted MosbyNo ratings yet
- TVBK 5229AArwebDocument95 pagesTVBK 5229AArwebalbertoxinaNo ratings yet
- Finite Element Modelling of Composite Bridge Stability: Martin ÅleniusDocument134 pagesFinite Element Modelling of Composite Bridge Stability: Martin Åleniusamirarshad91No ratings yet
- Volgers 2002Document15 pagesVolgers 2002junjie yiNo ratings yet
- Ubc 2013 Spring Wang YunDocument123 pagesUbc 2013 Spring Wang YunThiago MouraNo ratings yet
- CFDAnalysisof Airfoilusing Structuredand Unstructured MeshDocument18 pagesCFDAnalysisof Airfoilusing Structuredand Unstructured MeshAli AhmadNo ratings yet
- Hamide Thesis PDFDocument123 pagesHamide Thesis PDFoussama mimouniNo ratings yet
- Abhi Skill Dezire ReportDocument23 pagesAbhi Skill Dezire Reportinfo.reeluxNo ratings yet
- Ubc 2016 November Cove SamuelDocument139 pagesUbc 2016 November Cove Samuelигорь сидоренкоNo ratings yet
- PDM - 4579Document116 pagesPDM - 4579Joaquin VieraNo ratings yet
- Lei Zhou Thesis RF MEMSDocument110 pagesLei Zhou Thesis RF MEMSiliefinisNo ratings yet
- Cable StayedDocument289 pagesCable StayedAnurag KumarNo ratings yet
- Strength Design Method For Laminated GlassDocument79 pagesStrength Design Method For Laminated GlasszmogoNo ratings yet
- Compact Transmission LinesDocument13 pagesCompact Transmission LinesFelipe Espinosa GómezNo ratings yet
- Voth Andrew P 201011 PHD ThesisDocument353 pagesVoth Andrew P 201011 PHD ThesisBrice Patrice GollyNo ratings yet
- 2019 - Design Example of A Cantilever Wood DiaphragmDocument69 pages2019 - Design Example of A Cantilever Wood DiaphragmSebastián BerwartNo ratings yet
- Construction and Building Materials: Reza MasoudniaDocument18 pagesConstruction and Building Materials: Reza MasoudniaMazenMowafyNo ratings yet
- Campanella Tese LaserDocument52 pagesCampanella Tese LaserEdNo ratings yet
- Electron Beam LithographyDocument54 pagesElectron Beam LithographySeeniya SeenzNo ratings yet
- The Robert Gordon University, Aberdeen: School of EngineeringDocument110 pagesThe Robert Gordon University, Aberdeen: School of Engineeringmaso0140100% (1)
- Documents - Pub Case Study Sesamtm For Subsea Prepared by DNV GL Software TypicallyDocument23 pagesDocuments - Pub Case Study Sesamtm For Subsea Prepared by DNV GL Software TypicallyMiguel PereiraNo ratings yet
- Time-dependent Behaviour and Design of Composite Steel-concrete StructuresFrom EverandTime-dependent Behaviour and Design of Composite Steel-concrete StructuresNo ratings yet
- Video and Multimedia Transmissions over Cellular Networks: Analysis, Modelling and Optimization in Live 3G Mobile CommunicationsFrom EverandVideo and Multimedia Transmissions over Cellular Networks: Analysis, Modelling and Optimization in Live 3G Mobile CommunicationsNo ratings yet
- Design for High Performance, Low Power, and Reliable 3D Integrated CircuitsFrom EverandDesign for High Performance, Low Power, and Reliable 3D Integrated CircuitsNo ratings yet
- Modeling Human-Structure Interaction Using a Controller SystemFrom EverandModeling Human-Structure Interaction Using a Controller SystemNo ratings yet
- Micro Pile Design and ConstructionDocument28 pagesMicro Pile Design and ConstructionMelissa SammyNo ratings yet
- February MinutesDocument3 pagesFebruary MinutesHentai FiendNo ratings yet
- Advantages and Limitations of Confocal Chromatic SensorsDocument13 pagesAdvantages and Limitations of Confocal Chromatic SensorsGilmar A. NogueiraNo ratings yet
- Fisa Tehnica PEAD-MDocument3 pagesFisa Tehnica PEAD-MStefan StanciuNo ratings yet
- 6th Sem MarksheetDocument2 pages6th Sem Marksheetraghavxharma8No ratings yet
- The Effect of Social Spending On Reducing Poverty-Celikay2017Document14 pagesThe Effect of Social Spending On Reducing Poverty-Celikay2017Glena ShafiraNo ratings yet
- 2021 - Ii Csm-A TT Wef 22-08-22-1Document2 pages2021 - Ii Csm-A TT Wef 22-08-22-1BANDREDDY SARATH CHANDRANo ratings yet
- Control Commissioning: SeriesDocument52 pagesControl Commissioning: SeriesHeiner Hidalgo100% (2)
- Certified Reliability EngineerDocument9 pagesCertified Reliability EngineervishnuNo ratings yet
- Lily Chu and David K Robinson: Industrial Choices For Protein Production by Large-Scale Cell CultureDocument8 pagesLily Chu and David K Robinson: Industrial Choices For Protein Production by Large-Scale Cell CultureCarina OliveiraNo ratings yet
- Determining The Relationship Between The Hypothesis and The Conclusion of An If-Then StatementDocument15 pagesDetermining The Relationship Between The Hypothesis and The Conclusion of An If-Then StatementMaitem Stephanie GalosNo ratings yet
- Our Body Language Shapes Who You AreDocument7 pagesOur Body Language Shapes Who You AreRoberto AmaristaNo ratings yet
- Browiner MX30 Mobile DR Service Manual 2016.11.10Document91 pagesBrowiner MX30 Mobile DR Service Manual 2016.11.10Imecsa HondurasNo ratings yet
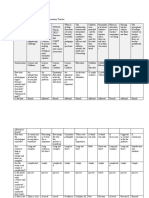
- QMB Fishbone DiagramDocument3 pagesQMB Fishbone DiagramElaine MacalandaNo ratings yet
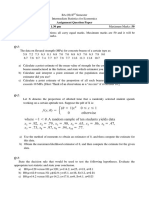
- Int Stats For Eco - Assignment Question PaperDocument2 pagesInt Stats For Eco - Assignment Question PaperAryan AroraNo ratings yet
- Dementia Clinical Case by SlidesgoDocument54 pagesDementia Clinical Case by SlidesgoLetíciaNo ratings yet
- Maintenance of Water and Wastewater Plants 2 PDFDocument67 pagesMaintenance of Water and Wastewater Plants 2 PDFنيرمين احمدNo ratings yet
- ICRM Rev1Document33 pagesICRM Rev1Alexandra IonelaNo ratings yet
- 221-227 Jett1403026Document7 pages221-227 Jett1403026Jared VallesNo ratings yet
- BIO152H5F SyllabusDocument7 pagesBIO152H5F SyllabusobiobuchiNo ratings yet
- Models in ThermoluminescenceDocument18 pagesModels in ThermoluminescenceLis R. BarretoNo ratings yet
- Safety and Efficacy of Shilajit (Mumie, Moomiyo)Document5 pagesSafety and Efficacy of Shilajit (Mumie, Moomiyo)Alejandro Müller100% (1)
- 54Ao8pRcSDWWM6VHe75AnA - Honors Lesson Rubric - Project CharterDocument3 pages54Ao8pRcSDWWM6VHe75AnA - Honors Lesson Rubric - Project CharternikandahalNo ratings yet
- Crop Breeding 1Document12 pagesCrop Breeding 1Manelli77No ratings yet
- Breast Imaging Survey FormDocument6 pagesBreast Imaging Survey Formmaryam cookNo ratings yet
- Forces and Motion: Unit 4: Module 1: Topic 2Document65 pagesForces and Motion: Unit 4: Module 1: Topic 2jabrielle ellice alunanNo ratings yet
- Engl321 Stylistic Analysis WorksheetDocument4 pagesEngl321 Stylistic Analysis WorksheetMatt ParmesanNo ratings yet
- Summary On Cognitive LinguisticsDocument31 pagesSummary On Cognitive LinguisticsNgô Duy Quốc BảoNo ratings yet
- Celtic Astrology - Early Irish Astrology - An Historical Argument by Peter Berresford EllisDocument7 pagesCeltic Astrology - Early Irish Astrology - An Historical Argument by Peter Berresford Ellisryder grayNo ratings yet
- Structural FunctionalismDocument14 pagesStructural FunctionalismHakaishinNo ratings yet
























































































Download as pdf or txt
You might also like
- TibertLicThesis-Numerical Analyses of Cable Roof StructuresDocument196 pagesTibertLicThesis-Numerical Analyses of Cable Roof Structuresngoc_ptt100% (1)
- Portfolio Cable Membrane Design Report RTDocument34 pagesPortfolio Cable Membrane Design Report RTKon KritNo ratings yet
- Scientific ManualDocument42 pagesScientific ManualLeonardo TejedorNo ratings yet
- A Technology For Designing Tensegrity Domes and SpheresDocument31 pagesA Technology For Designing Tensegrity Domes and SpheresIrmantas SauliusNo ratings yet
- Handbook in Operations Research and Management ScienceDocument78 pagesHandbook in Operations Research and Management SciencebangiebangieNo ratings yet
- Scientific Reference Manual - v1.0Document42 pagesScientific Reference Manual - v1.0Jeric Dela Cruz QuiminalesNo ratings yet
- Full Text 01Document69 pagesFull Text 01Rohit LauvanshiNo ratings yet
- Final Project Finite Element AnalysisDocument41 pagesFinal Project Finite Element AnalysisAkhil KapoorNo ratings yet
- Finite Element Methods I Finite Element Analysis of RCC BeamDocument10 pagesFinite Element Methods I Finite Element Analysis of RCC BeamphucNo ratings yet
- Wrinkling of Membrane Structure: Sarvesh KumarDocument32 pagesWrinkling of Membrane Structure: Sarvesh KumarSarvesh KulhariNo ratings yet
- Bhatkar (2015) - Finite Element Analysis of Crane Hook and Optimization Using Taguchi ApproachDocument5 pagesBhatkar (2015) - Finite Element Analysis of Crane Hook and Optimization Using Taguchi ApproachGogyNo ratings yet
- Ramaite Mbuso Fikile 2013Document87 pagesRamaite Mbuso Fikile 2013Saby Lisbeth Eugenio PonceNo ratings yet
- Post-Tensioned Stress Ribbon Systems in Long-Span Roofs: Samih Ahmed Guayente MinchotDocument150 pagesPost-Tensioned Stress Ribbon Systems in Long-Span Roofs: Samih Ahmed Guayente MinchotSonamNo ratings yet
- Glulam Shear Frame and CLT Shear WallDocument192 pagesGlulam Shear Frame and CLT Shear WallLuis del CidNo ratings yet
- Full Text 01Document79 pagesFull Text 01jorge reisNo ratings yet
- Engineering Analysis of Tension Structures Theory and PracticeDocument11 pagesEngineering Analysis of Tension Structures Theory and PracticeNora AngelicaNo ratings yet
- Applications of Metaheuristic Optimization PDFDocument381 pagesApplications of Metaheuristic Optimization PDFمحمد حمديNo ratings yet
- Design and Modeling of InductorsNPAryanDocument88 pagesDesign and Modeling of InductorsNPAryanJoe MullerNo ratings yet
- FinalProject PDFDocument91 pagesFinalProject PDFAlessandro MuragliaNo ratings yet
- A Hybrid Cavity and Parallel-Plate PEEC Method For Analysis of CoDocument69 pagesA Hybrid Cavity and Parallel-Plate PEEC Method For Analysis of CoAparna KannanNo ratings yet
- Nonlinear Finite Element Analysis of RC Shell StructureDocument44 pagesNonlinear Finite Element Analysis of RC Shell Structureshashi mauyasNo ratings yet
- Brendan Duffy Senior Design Report 2b1wvxzDocument12 pagesBrendan Duffy Senior Design Report 2b1wvxzmuhammet mutluNo ratings yet
- CaiM032018D Final Version Fromgraduate School 20180322Document160 pagesCaiM032018D Final Version Fromgraduate School 20180322CopperNo ratings yet
- Optical Fibres: Analysis, Numerical Modelling and OptimisationDocument187 pagesOptical Fibres: Analysis, Numerical Modelling and OptimisationRahul ChoudharyNo ratings yet
- Numerical Analyses of Cable Roof Structures - Gunnar TibertDocument196 pagesNumerical Analyses of Cable Roof Structures - Gunnar TibertjorgetstcalderonNo ratings yet
- CYPE CONNECT-Calculations Report PDFDocument16 pagesCYPE CONNECT-Calculations Report PDFAHMAD BALFAQIHNo ratings yet
- HV CablesDocument100 pagesHV Cableso14657No ratings yet
- Hfs CvtyDocument68 pagesHfs CvtyVladeta JevremovićNo ratings yet
- D21fa H00345936Document18 pagesD21fa H00345936jqwj1292No ratings yet
- Perfectly Matched Layers For Second Order Wave Equations: IT Licentiate Theses 2010-004Document46 pagesPerfectly Matched Layers For Second Order Wave Equations: IT Licentiate Theses 2010-004jesus1843No ratings yet
- Non Linear Assessment of A Concrete Slab Bridge Loaded To FailureDocument118 pagesNon Linear Assessment of A Concrete Slab Bridge Loaded To FailuremustafaNo ratings yet
- Selamawit DegeDocument95 pagesSelamawit DegeSultan MohammedNo ratings yet
- Computational Fluid Dynamics Assignment 2Document20 pagesComputational Fluid Dynamics Assignment 2AYUSH RAINo ratings yet
- Moncrieff 97Document10 pagesMoncrieff 97Ted MosbyNo ratings yet
- TVBK 5229AArwebDocument95 pagesTVBK 5229AArwebalbertoxinaNo ratings yet
- Finite Element Modelling of Composite Bridge Stability: Martin ÅleniusDocument134 pagesFinite Element Modelling of Composite Bridge Stability: Martin Åleniusamirarshad91No ratings yet
- Volgers 2002Document15 pagesVolgers 2002junjie yiNo ratings yet
- Ubc 2013 Spring Wang YunDocument123 pagesUbc 2013 Spring Wang YunThiago MouraNo ratings yet
- CFDAnalysisof Airfoilusing Structuredand Unstructured MeshDocument18 pagesCFDAnalysisof Airfoilusing Structuredand Unstructured MeshAli AhmadNo ratings yet
- Hamide Thesis PDFDocument123 pagesHamide Thesis PDFoussama mimouniNo ratings yet
- Abhi Skill Dezire ReportDocument23 pagesAbhi Skill Dezire Reportinfo.reeluxNo ratings yet
- Ubc 2016 November Cove SamuelDocument139 pagesUbc 2016 November Cove Samuelигорь сидоренкоNo ratings yet
- PDM - 4579Document116 pagesPDM - 4579Joaquin VieraNo ratings yet
- Lei Zhou Thesis RF MEMSDocument110 pagesLei Zhou Thesis RF MEMSiliefinisNo ratings yet
- Cable StayedDocument289 pagesCable StayedAnurag KumarNo ratings yet
- Strength Design Method For Laminated GlassDocument79 pagesStrength Design Method For Laminated GlasszmogoNo ratings yet
- Compact Transmission LinesDocument13 pagesCompact Transmission LinesFelipe Espinosa GómezNo ratings yet
- Voth Andrew P 201011 PHD ThesisDocument353 pagesVoth Andrew P 201011 PHD ThesisBrice Patrice GollyNo ratings yet
- 2019 - Design Example of A Cantilever Wood DiaphragmDocument69 pages2019 - Design Example of A Cantilever Wood DiaphragmSebastián BerwartNo ratings yet
- Construction and Building Materials: Reza MasoudniaDocument18 pagesConstruction and Building Materials: Reza MasoudniaMazenMowafyNo ratings yet
- Campanella Tese LaserDocument52 pagesCampanella Tese LaserEdNo ratings yet
- Electron Beam LithographyDocument54 pagesElectron Beam LithographySeeniya SeenzNo ratings yet
- The Robert Gordon University, Aberdeen: School of EngineeringDocument110 pagesThe Robert Gordon University, Aberdeen: School of Engineeringmaso0140100% (1)
- Documents - Pub Case Study Sesamtm For Subsea Prepared by DNV GL Software TypicallyDocument23 pagesDocuments - Pub Case Study Sesamtm For Subsea Prepared by DNV GL Software TypicallyMiguel PereiraNo ratings yet
- Time-dependent Behaviour and Design of Composite Steel-concrete StructuresFrom EverandTime-dependent Behaviour and Design of Composite Steel-concrete StructuresNo ratings yet
- Video and Multimedia Transmissions over Cellular Networks: Analysis, Modelling and Optimization in Live 3G Mobile CommunicationsFrom EverandVideo and Multimedia Transmissions over Cellular Networks: Analysis, Modelling and Optimization in Live 3G Mobile CommunicationsNo ratings yet
- Design for High Performance, Low Power, and Reliable 3D Integrated CircuitsFrom EverandDesign for High Performance, Low Power, and Reliable 3D Integrated CircuitsNo ratings yet
- Modeling Human-Structure Interaction Using a Controller SystemFrom EverandModeling Human-Structure Interaction Using a Controller SystemNo ratings yet
- Micro Pile Design and ConstructionDocument28 pagesMicro Pile Design and ConstructionMelissa SammyNo ratings yet
- February MinutesDocument3 pagesFebruary MinutesHentai FiendNo ratings yet
- Advantages and Limitations of Confocal Chromatic SensorsDocument13 pagesAdvantages and Limitations of Confocal Chromatic SensorsGilmar A. NogueiraNo ratings yet
- Fisa Tehnica PEAD-MDocument3 pagesFisa Tehnica PEAD-MStefan StanciuNo ratings yet
- 6th Sem MarksheetDocument2 pages6th Sem Marksheetraghavxharma8No ratings yet
- The Effect of Social Spending On Reducing Poverty-Celikay2017Document14 pagesThe Effect of Social Spending On Reducing Poverty-Celikay2017Glena ShafiraNo ratings yet
- 2021 - Ii Csm-A TT Wef 22-08-22-1Document2 pages2021 - Ii Csm-A TT Wef 22-08-22-1BANDREDDY SARATH CHANDRANo ratings yet
- Control Commissioning: SeriesDocument52 pagesControl Commissioning: SeriesHeiner Hidalgo100% (2)
- Certified Reliability EngineerDocument9 pagesCertified Reliability EngineervishnuNo ratings yet
- Lily Chu and David K Robinson: Industrial Choices For Protein Production by Large-Scale Cell CultureDocument8 pagesLily Chu and David K Robinson: Industrial Choices For Protein Production by Large-Scale Cell CultureCarina OliveiraNo ratings yet
- Determining The Relationship Between The Hypothesis and The Conclusion of An If-Then StatementDocument15 pagesDetermining The Relationship Between The Hypothesis and The Conclusion of An If-Then StatementMaitem Stephanie GalosNo ratings yet
- Our Body Language Shapes Who You AreDocument7 pagesOur Body Language Shapes Who You AreRoberto AmaristaNo ratings yet
- Browiner MX30 Mobile DR Service Manual 2016.11.10Document91 pagesBrowiner MX30 Mobile DR Service Manual 2016.11.10Imecsa HondurasNo ratings yet
- QMB Fishbone DiagramDocument3 pagesQMB Fishbone DiagramElaine MacalandaNo ratings yet
- Int Stats For Eco - Assignment Question PaperDocument2 pagesInt Stats For Eco - Assignment Question PaperAryan AroraNo ratings yet
- Dementia Clinical Case by SlidesgoDocument54 pagesDementia Clinical Case by SlidesgoLetíciaNo ratings yet
- Maintenance of Water and Wastewater Plants 2 PDFDocument67 pagesMaintenance of Water and Wastewater Plants 2 PDFنيرمين احمدNo ratings yet
- ICRM Rev1Document33 pagesICRM Rev1Alexandra IonelaNo ratings yet
- 221-227 Jett1403026Document7 pages221-227 Jett1403026Jared VallesNo ratings yet
- BIO152H5F SyllabusDocument7 pagesBIO152H5F SyllabusobiobuchiNo ratings yet
- Models in ThermoluminescenceDocument18 pagesModels in ThermoluminescenceLis R. BarretoNo ratings yet
- Safety and Efficacy of Shilajit (Mumie, Moomiyo)Document5 pagesSafety and Efficacy of Shilajit (Mumie, Moomiyo)Alejandro Müller100% (1)
- 54Ao8pRcSDWWM6VHe75AnA - Honors Lesson Rubric - Project CharterDocument3 pages54Ao8pRcSDWWM6VHe75AnA - Honors Lesson Rubric - Project CharternikandahalNo ratings yet
- Crop Breeding 1Document12 pagesCrop Breeding 1Manelli77No ratings yet
- Breast Imaging Survey FormDocument6 pagesBreast Imaging Survey Formmaryam cookNo ratings yet
- Forces and Motion: Unit 4: Module 1: Topic 2Document65 pagesForces and Motion: Unit 4: Module 1: Topic 2jabrielle ellice alunanNo ratings yet
- Engl321 Stylistic Analysis WorksheetDocument4 pagesEngl321 Stylistic Analysis WorksheetMatt ParmesanNo ratings yet
- Summary On Cognitive LinguisticsDocument31 pagesSummary On Cognitive LinguisticsNgô Duy Quốc BảoNo ratings yet
- Celtic Astrology - Early Irish Astrology - An Historical Argument by Peter Berresford EllisDocument7 pagesCeltic Astrology - Early Irish Astrology - An Historical Argument by Peter Berresford Ellisryder grayNo ratings yet
- Structural FunctionalismDocument14 pagesStructural FunctionalismHakaishinNo ratings yet