Download as pdf or txt
You might also like
- Part Catelogue 750 Kva - KTA 38 G2 I - 5276656Document133 pagesPart Catelogue 750 Kva - KTA 38 G2 I - 5276656sblnt2008100% (4)
- Obstacle Avoidance Robot Using Verilog CodeDocument14 pagesObstacle Avoidance Robot Using Verilog Codecdiyyala50% (4)
- A Report of Mini Project Line Following Robot Car Using ArdinoDocument10 pagesA Report of Mini Project Line Following Robot Car Using Ardinorao asad0% (1)
- Parallel Parking RC CarDocument15 pagesParallel Parking RC CarazmyzumaNo ratings yet
- Project Report: Obstacle Avoiding 4WD Arduino RobotDocument12 pagesProject Report: Obstacle Avoiding 4WD Arduino RobotLahmeen HaiderNo ratings yet
- 2013 Dodge Ram 1500 Color Schematics Sound Systems Premium Radio Circuit 3 of 3Document1 page2013 Dodge Ram 1500 Color Schematics Sound Systems Premium Radio Circuit 3 of 3Ndao86No ratings yet
- 2-Way Sound Sensitive Line FollowerDocument13 pages2-Way Sound Sensitive Line FollowerAbhishek DasNo ratings yet
- Controlling DC Motors Using Arduino and IR RemoteDocument12 pagesControlling DC Motors Using Arduino and IR RemoteAshok kumarNo ratings yet
- OoooooDocument21 pagesOooooojamsheer4462No ratings yet
- PDF Maze Solver RobotDocument7 pagesPDF Maze Solver RobotVenkat AlluNo ratings yet
- Control Systems Project ReportDocument18 pagesControl Systems Project Reportayesha amjad100% (2)
- Arduino - Modifying A Robot Arm - Lucky LarryDocument25 pagesArduino - Modifying A Robot Arm - Lucky LarryLeonardo Perin VichiNo ratings yet
- Group14 LightSensingRobotDocument16 pagesGroup14 LightSensingRobotquote1503No ratings yet
- Arduino Solar Tracker: Guided byDocument22 pagesArduino Solar Tracker: Guided byVunnava SravaniNo ratings yet
- B0610011017 PDFDocument8 pagesB0610011017 PDFEdiNo ratings yet
- Obstacle Avoiding Robot With IR Sensors Without Mi PDFDocument8 pagesObstacle Avoiding Robot With IR Sensors Without Mi PDFRichard Kaven SerquinaNo ratings yet
- Mechatronics System Design - MECA 443 Lab Experiment 4 - Stepper Motor ControlDocument6 pagesMechatronics System Design - MECA 443 Lab Experiment 4 - Stepper Motor ControlAli ChallakNo ratings yet
- Advanced Line FollowerDocument15 pagesAdvanced Line FollowerMohtasim NakibNo ratings yet
- Line Follower Robot Using ArduinoDocument13 pagesLine Follower Robot Using Arduinolizhi2012No ratings yet
- Obstacle Detecting Line Follower RobotDocument19 pagesObstacle Detecting Line Follower RobotBibek Sau80% (5)
- Fire Fighting RobotDocument60 pagesFire Fighting RobotkalaivaniNo ratings yet
- Final Copy of Line Follower RobotDocument9 pagesFinal Copy of Line Follower RobotAhuja ShivamNo ratings yet
- Arduino Based Fire Fighting Robot ProjectDocument13 pagesArduino Based Fire Fighting Robot ProjectAnant TiwariNo ratings yet
- Irjet V6i454Document4 pagesIrjet V6i454Ngoc AnhNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotRohit sharmaNo ratings yet
- Smartphone Controlled Arduino Rover PDFDocument30 pagesSmartphone Controlled Arduino Rover PDFWalt Whimpenny100% (1)
- Snake Robot 1 1 PDFDocument10 pagesSnake Robot 1 1 PDFShahed Hussain RizviNo ratings yet
- Name ID Assigned Work: Group Name: Robo Instructors Group MembersDocument6 pagesName ID Assigned Work: Group Name: Robo Instructors Group MembersAftab Mustafa QureshiNo ratings yet
- WAR Field Spying Robot: January 2018Document6 pagesWAR Field Spying Robot: January 2018Chemudupati SunilNo ratings yet
- Simulation Studies On Line Light and Human FollowiDocument25 pagesSimulation Studies On Line Light and Human FollowiBizuneh getuNo ratings yet
- Arduino Propeller LED DisplayDocument8 pagesArduino Propeller LED DisplayHamzaNo ratings yet
- REPORTDocument22 pagesREPORThohi4808No ratings yet
- Nvis 3302ARD ManualDocument37 pagesNvis 3302ARD ManualVinay DograNo ratings yet
- Microp ReportDocument13 pagesMicrop ReportKelvin MusyokiNo ratings yet
- 3 HufflepuffpcbDocument9 pages3 HufflepuffpcbDisenyopcb 22No ratings yet
- 3.0 Hardware and ApparatusDocument5 pages3.0 Hardware and ApparatusEileen WongNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotVenkat Munnangi100% (1)
- Gripper Robot: Solution Architecture Document ProjectDocument9 pagesGripper Robot: Solution Architecture Document Projectmonika nagarNo ratings yet
- Understanding MR GeneralDocument8 pagesUnderstanding MR GeneralRicardo Antonio VasquezNo ratings yet
- Line Follower Robot Using Arduino and L298N ModuleDocument9 pagesLine Follower Robot Using Arduino and L298N ModuleBizuneh getuNo ratings yet
- Line Follower Robot Using ArduinoDocument5 pagesLine Follower Robot Using Arduinochockalingam athilingam100% (1)
- Arduino Sunflower Project ReportDocument8 pagesArduino Sunflower Project ReportZEESHAN ALINo ratings yet
- All Directional Car Draft 1 With L298NDocument12 pagesAll Directional Car Draft 1 With L298NAwais AsadNo ratings yet
- ECFBCK1L - Lab03 - Group 4Document7 pagesECFBCK1L - Lab03 - Group 4Hannah VisitacionNo ratings yet
- Robotics Module 3 PRINTDocument32 pagesRobotics Module 3 PRINTmaxmanishNo ratings yet
- Research Report - CEPDocument3 pagesResearch Report - CEPFahad AliNo ratings yet
- Automatic Railway Gate Control System Using Arduino Uno PresentationDocument19 pagesAutomatic Railway Gate Control System Using Arduino Uno PresentationRio MartinNo ratings yet
- Design and Implementation of Line Follower Robot Using Arduino MicrocontrollerDocument4 pagesDesign and Implementation of Line Follower Robot Using Arduino MicrocontrollerFahru ZainiNo ratings yet
- Obstacle Avoiding Robot Ppt-2Document24 pagesObstacle Avoiding Robot Ppt-2Faizan MansoorNo ratings yet
- Rescue Robot: Presented By: Supervised byDocument30 pagesRescue Robot: Presented By: Supervised byNazmul Shikder RiyadhNo ratings yet
- Lab Report 5.1Document4 pagesLab Report 5.1Hassan KobrosliNo ratings yet
- 8 Mission MappingDocument21 pages8 Mission Mappingankit407No ratings yet
- Joe Project RobotDocument19 pagesJoe Project RobotTiruveedula RishendraNo ratings yet
- PROJECTDocument10 pagesPROJECTkrishna2010.jeyamNo ratings yet
- Line Follower Robot Using Arduino 2Document7 pagesLine Follower Robot Using Arduino 2andresNo ratings yet
- Mechatronics System Design - MECA 443 Lab Experiment 3 - Position Control Using An EncoderDocument6 pagesMechatronics System Design - MECA 443 Lab Experiment 3 - Position Control Using An EncoderAli ChallakNo ratings yet
- DIY IR Sensor Module Circuit DiagramDocument13 pagesDIY IR Sensor Module Circuit DiagramHimanshu guptaNo ratings yet
- Line Follower Robot Using Arduino: PBL Review Report OnDocument10 pagesLine Follower Robot Using Arduino: PBL Review Report OnAvinash KumarNo ratings yet
- LabReport07 CSDocument5 pagesLabReport07 CSb21215No ratings yet
- Automatic Railway Gate Control System Using Arduino Uno PresentationDocument20 pagesAutomatic Railway Gate Control System Using Arduino Uno PresentationRio Martin100% (1)
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Group05 - Lab1 SubmissionDocument9 pagesGroup05 - Lab1 SubmissionNavindu PereraNo ratings yet
- Group05 - Lab2 SubmissionDocument13 pagesGroup05 - Lab2 SubmissionNavindu PereraNo ratings yet
- Tute 01Document9 pagesTute 01Navindu PereraNo ratings yet
- Introduction To Quartus II and VHDL Hierarchical DesignDocument8 pagesIntroduction To Quartus II and VHDL Hierarchical DesignNavindu PereraNo ratings yet
- Continuous Assessment Cover Sheet Faculty of Engineering: ThermodynamicsDocument27 pagesContinuous Assessment Cover Sheet Faculty of Engineering: ThermodynamicsNavindu PereraNo ratings yet
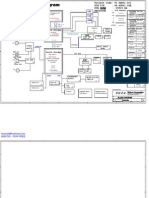
- Acer Aspire 4251 4551 Emachines d440 d640 d640g - Wistron Hm42-Dn Je40-Dn - Rev - 3Document63 pagesAcer Aspire 4251 4551 Emachines d440 d640 d640g - Wistron Hm42-Dn Je40-Dn - Rev - 3chatmarNo ratings yet
- Enhanced A154 Form For Indoor FDH (DIY) 65-01-004-025Document3 pagesEnhanced A154 Form For Indoor FDH (DIY) 65-01-004-025kjhkkhk100% (1)
- Kaldi Nnet3 PDFDocument1 pageKaldi Nnet3 PDFSean ChengNo ratings yet
- ArcGIS Lab 1 - IntroductionDocument24 pagesArcGIS Lab 1 - IntroductionnayabNo ratings yet
- Assignment 1 Part 1Document6 pagesAssignment 1 Part 1Aditi AgrawalNo ratings yet
- Broshure Face Master 2.3Document2 pagesBroshure Face Master 2.3lorenzo henerNo ratings yet
- 02-1 Synchronous MachinesDocument54 pages02-1 Synchronous MachinessulemankhalidNo ratings yet
- SDS AeroShell Turbine Oil 500Document19 pagesSDS AeroShell Turbine Oil 500Jerome Cardenas TablacNo ratings yet
- SNP 6320rh EngDocument1 pageSNP 6320rh EngWagner Quezada IparraguirreNo ratings yet
- The History of The AtomDocument5 pagesThe History of The AtomEmilyAranas100% (2)
- Subsurface Exploration LogDocument6 pagesSubsurface Exploration LogIgnatius PathulaNo ratings yet
- MagFan ONe Distributor Version PDFDocument14 pagesMagFan ONe Distributor Version PDFMiguel CampagnoniNo ratings yet
- LTE Solution Strategy Overview & Proposal v1.3Document27 pagesLTE Solution Strategy Overview & Proposal v1.3Syukri Muhammad JNo ratings yet
- Mohamad Bassam Ghader - CV-01-07-2023Document5 pagesMohamad Bassam Ghader - CV-01-07-2023Samah SabbaghNo ratings yet
- IT Assignment 2Document2 pagesIT Assignment 2syed02No ratings yet
- Checking Bolts in Camshaft Coupling MAN SL02-405Document6 pagesChecking Bolts in Camshaft Coupling MAN SL02-405harikrishnanpd3327No ratings yet
- Farm Machinery Engineering Design FormulaeDocument28 pagesFarm Machinery Engineering Design FormulaePrashant KunalNo ratings yet
- Pip Stc01018Document49 pagesPip Stc01018Jose Luis Velasco CadavidNo ratings yet
- Tibco BW Interview QuestionsDocument8 pagesTibco BW Interview Questionsabu1882No ratings yet
- MS PowerPoint Keyboard ShortcutsDocument22 pagesMS PowerPoint Keyboard Shortcutsapi-3754269100% (1)
- Double Pipe & Multitube HEDocument4 pagesDouble Pipe & Multitube HEjagadish2012100% (1)
- Prestige XT-W Installation InstructionsDocument2 pagesPrestige XT-W Installation Instructionstatiana_370273750No ratings yet
- OMet 1Document1 pageOMet 1Jeuz Llorenz C. ApitaNo ratings yet
- Torque SpecificationDocument20 pagesTorque SpecificationSyed Mohammad Naveed100% (1)
- Air Force Space CommandDocument5 pagesAir Force Space CommandAryan KhannaNo ratings yet
- Su 30 MkiDocument14 pagesSu 30 MkihhmanishNo ratings yet
- Properties Value: Ug-23 Maximum Allowable Stress ValuesDocument2 pagesProperties Value: Ug-23 Maximum Allowable Stress ValuesMohamad Faiz ZulkipliNo ratings yet
- Module 3 Post TestDocument5 pagesModule 3 Post TestCleórbete Santos100% (1)