Download as pdf or txt
You might also like
- MS 1013igDocument30 pagesMS 1013igkristoforos100% (3)
- Trilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsFrom EverandTrilogy of Wireless Power: Basic principles, WPT Systems and ApplicationsNo ratings yet
- Brochure VC-920 EN PDFDocument4 pagesBrochure VC-920 EN PDFAriawan HasnanNo ratings yet
- Motor Types NXP NotesDocument4 pagesMotor Types NXP NotesdaveNo ratings yet
- BRU13778 T20 Data Sheet - 04Document2 pagesBRU13778 T20 Data Sheet - 04robert timothyNo ratings yet
- 4 Page Cenizas Stabilizer Brochure Final PDFDocument4 pages4 Page Cenizas Stabilizer Brochure Final PDFJee MainNo ratings yet
- MODEL 1222: Electric Power Steering ControllerDocument4 pagesMODEL 1222: Electric Power Steering ControllerIker BasqueAdventureNo ratings yet
- Very High Precision, Programmable Linear Hall-Effect Sensor ICDocument27 pagesVery High Precision, Programmable Linear Hall-Effect Sensor ICBoy HensuyễnNo ratings yet
- LMR 16020Document36 pagesLMR 16020m3rishorNo ratings yet
- Activecomp System Catalogue Neptune DucatiDocument2 pagesActivecomp System Catalogue Neptune DucatiMauricio Oropeza CabreraNo ratings yet
- Bushing Monitor FlyerDocument4 pagesBushing Monitor FlyerCarlos JaraNo ratings yet
- Switchsync™ PWC600 Point-On-Wave ControllerDocument4 pagesSwitchsync™ PWC600 Point-On-Wave Controllermic68hc11100% (1)
- CWF PDFDocument8 pagesCWF PDFswapnil kapaseNo ratings yet
- Fault Detection in TM LineDocument25 pagesFault Detection in TM Linenaveen gNo ratings yet
- Statcom CatologDocument6 pagesStatcom CatologPRATEEK1469WOWNo ratings yet
- Reliable Protection Against Overheating For Your MotorsDocument2 pagesReliable Protection Against Overheating For Your MotorsAmir YuliNo ratings yet
- GRID 210 X 280 DATASHEET - 2pp - LEVEL 3 VCH Lores (1) POW Switching Device PDFDocument2 pagesGRID 210 X 280 DATASHEET - 2pp - LEVEL 3 VCH Lores (1) POW Switching Device PDFngocanhvyNo ratings yet
- SMA Energy Meter MinDocument2 pagesSMA Energy Meter Minkhal manNo ratings yet
- M O D E L S 1 2 1 4 / 1 2 1 5 / 1 2 1 9: Microprocessor Motor Speed ControllersDocument2 pagesM O D E L S 1 2 1 4 / 1 2 1 5 / 1 2 1 9: Microprocessor Motor Speed ControllersГригорий УсачёвNo ratings yet
- IS920 Product Information: Inverter System 48 V DC For TelecommunicationDocument10 pagesIS920 Product Information: Inverter System 48 V DC For TelecommunicationOleg KuryanNo ratings yet
- Brochure Vibrocontrol 1100 enDocument4 pagesBrochure Vibrocontrol 1100 enRizki SanjayaNo ratings yet
- Fault Calculation BasicsDocument107 pagesFault Calculation BasicsCarlnagum 123456789100% (2)
- UCC28180 Programmable Frequency, Continuous Conduction Mode (CCM), Boost Power Factor Correction (PFC) ControllerDocument48 pagesUCC28180 Programmable Frequency, Continuous Conduction Mode (CCM), Boost Power Factor Correction (PFC) Controllerg4okk8809No ratings yet
- Altistart Brochure 2016Document9 pagesAltistart Brochure 2016nooruddinkhan1No ratings yet
- Rod & Pipe Demagnetizing DeviceDocument4 pagesRod & Pipe Demagnetizing Devicemah_abdelaalNo ratings yet
- SVC Flicker KompanzasyonDocument12 pagesSVC Flicker KompanzasyonLeonardoNo ratings yet
- Micro 100 CCR: Microprocessor Controlled Constant Current RegulatorDocument6 pagesMicro 100 CCR: Microprocessor Controlled Constant Current RegulatorAkmal ArdiNo ratings yet
- 1500wlprot6002-000 PDFDocument2 pages1500wlprot6002-000 PDFsy_binh97No ratings yet
- Reliable Solid State Digital Control... : Type SSM Medium Voltage 2300 - 6900VDocument12 pagesReliable Solid State Digital Control... : Type SSM Medium Voltage 2300 - 6900VsudhakarraomNo ratings yet
- PCS 978 Data Sheet PDFDocument45 pagesPCS 978 Data Sheet PDFMateus FrancoNo ratings yet
- Protective Relays Guide SCHNEIDER-1Document56 pagesProtective Relays Guide SCHNEIDER-1WONDIMUNo ratings yet
- Lci BrochureDocument20 pagesLci BrochureSergey PavlovNo ratings yet
- AC Drive Cable Selection PDF From I&S 1263400720Document8 pagesAC Drive Cable Selection PDF From I&S 1263400720zaheeruddin_mohdNo ratings yet
- Transfer Switch GTEC Open or Delayed Transition: Description FeaturesDocument5 pagesTransfer Switch GTEC Open or Delayed Transition: Description FeaturesMohamed HamdallahNo ratings yet
- Sprint 350 Secure Energy MeterDocument8 pagesSprint 350 Secure Energy Meterrkrishikumar3No ratings yet
- Remotre Monitoring of Transformer Health Over The InternetDocument48 pagesRemotre Monitoring of Transformer Health Over The InternetMohan RajNo ratings yet
- Cvm-E3-Mini-Wieth: Power Analyzer With Wi-Fi and Ethernet CommunicationsDocument8 pagesCvm-E3-Mini-Wieth: Power Analyzer With Wi-Fi and Ethernet CommunicationsDavid SilvestreNo ratings yet
- 34 ST 03 67Document22 pages34 ST 03 67Manzoor-ul- HassanNo ratings yet
- Soft StarterDocument8 pagesSoft Starterferas rahilNo ratings yet
- Traction Drive HES880 - Flyer - 3AUA0000161471 - RevF - EN PDFDocument2 pagesTraction Drive HES880 - Flyer - 3AUA0000161471 - RevF - EN PDFjalilemadiNo ratings yet
- BLDCDocument4 pagesBLDCTeenaNo ratings yet
- Speed Sensors For Transmission Control: ApplicationDocument3 pagesSpeed Sensors For Transmission Control: ApplicationJOSE EDUARDO NOGUERON LOPEZNo ratings yet
- Diff Protection PDFDocument14 pagesDiff Protection PDFarunNo ratings yet
- A Monolithic Current-Mode CMOS DC-DC Converter With On-Chip Current-Sensing TechniqueDocument12 pagesA Monolithic Current-Mode CMOS DC-DC Converter With On-Chip Current-Sensing Techniquesyntan.sinhaNo ratings yet
- Ats DatasheetDocument2 pagesAts DatasheetSoltani AliNo ratings yet
- MNS MNS: Auto Transfert Switch UnitDocument2 pagesMNS MNS: Auto Transfert Switch Unitluat1983No ratings yet
- Eaton Type Ii Static Transfer Switch: Powerchain Management SolutionsDocument2 pagesEaton Type Ii Static Transfer Switch: Powerchain Management SolutionsAldo Bona HasudunganNo ratings yet
- PosterDocument1 pagePosterAn IlNo ratings yet
- 3022 - ICS AccelerometerDocument4 pages3022 - ICS AccelerometerwahyudiyonoNo ratings yet
- SICAMFCMplus en Catalog Ed.1Document16 pagesSICAMFCMplus en Catalog Ed.1quoc dat NguyenNo ratings yet
- Define Mechatronics and List Three Advantages For MechatronicsDocument15 pagesDefine Mechatronics and List Three Advantages For MechatronicsMostafa Tarek shabanNo ratings yet
- Catalog HYUNDAI HGMP (E)Document33 pagesCatalog HYUNDAI HGMP (E)Kostas TressosNo ratings yet
- Micom General Catalogue PDFDocument52 pagesMicom General Catalogue PDFnguyen sonNo ratings yet
- High-Performance Current Regulation and Efficient PWM Implementation For Low-Inductance Servo MotorsDocument11 pagesHigh-Performance Current Regulation and Efficient PWM Implementation For Low-Inductance Servo Motorsye001991gNo ratings yet
- Fast and High Precision Motor Control For High Performance Servo Drives PDFDocument8 pagesFast and High Precision Motor Control For High Performance Servo Drives PDFmotionNo ratings yet
- 830 Display KnickDocument12 pages830 Display KnickMiguelNo ratings yet
- Tiduc 07Document33 pagesTiduc 07saahithya AlagarsamyNo ratings yet
- 39 210940 01GB 05 - FunctionalDescription - CDocument18 pages39 210940 01GB 05 - FunctionalDescription - CJose InsaurraldeNo ratings yet
- AFP-300/AFP-400 Analog Fire Panel: Operations ManualDocument44 pagesAFP-300/AFP-400 Analog Fire Panel: Operations ManualLeandro de FigueiredoNo ratings yet
- 01 - DS - P293 Data Sheet Issue 5Document3 pages01 - DS - P293 Data Sheet Issue 5Parul MehtaNo ratings yet
- LECTURE 4-Direct Link Networks Part IDocument12 pagesLECTURE 4-Direct Link Networks Part IyesmuraliNo ratings yet
- Solar Based Grass CutterDocument6 pagesSolar Based Grass CutterTTNo ratings yet
- Chem OlympiadDocument9 pagesChem Olympiadnessabeans43No ratings yet
- Yearly Lesson Plan Chemistry Form 4Document30 pagesYearly Lesson Plan Chemistry Form 4fakiah binti abdul khalid100% (2)
- Aguas S.R.L.: Item # Item Number Description PriceDocument6 pagesAguas S.R.L.: Item # Item Number Description PriceGastón CortezNo ratings yet
- Additional Work After Revision (040511)Document24 pagesAdditional Work After Revision (040511)SamuelTrinandoNo ratings yet
- Vacuum CleanerDocument21 pagesVacuum Cleanerapi-327824216No ratings yet
- Series DMTFB Wall-Mount Clamp-On Transit Time Ultrasonic Flow MetersDocument2 pagesSeries DMTFB Wall-Mount Clamp-On Transit Time Ultrasonic Flow MetersLuis Gutiérrez AlvarezNo ratings yet
- Catia Aided Radome Analysis Using Geometric Optics MethodDocument5 pagesCatia Aided Radome Analysis Using Geometric Optics MethodAbrham Yair Aguilar RodriguezNo ratings yet
- Red Bus Test PlanDocument8 pagesRed Bus Test PlanBasker Guptha50% (4)
- CRT Monitor s7500Document34 pagesCRT Monitor s7500Lucky RaiNo ratings yet
- SM EN Rad8 070126Document20 pagesSM EN Rad8 070126Sulay Avila LlanosNo ratings yet
- IOM-Indoor Inverter TraneDocument32 pagesIOM-Indoor Inverter TraneLeo FrontelliNo ratings yet
- Xilinx 96Document909 pagesXilinx 96pepoteferNo ratings yet
- PowerElectronics SD750 Series BrochureDocument56 pagesPowerElectronics SD750 Series BrochureValdo SouzaNo ratings yet
- Map3202sirh Ic6900Document1 pageMap3202sirh Ic6900rammerDankovNo ratings yet
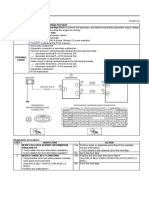
- DTC P2503 (MZR 2.0 Disi)Document2 pagesDTC P2503 (MZR 2.0 Disi)Abdul RohmatNo ratings yet
- Deepika Nigam Curriculum VitaeDocument3 pagesDeepika Nigam Curriculum VitaeChetan GuptaNo ratings yet
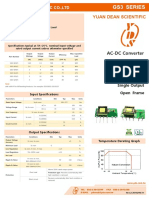
- GS3 SeriesDocument2 pagesGS3 SeriesDeepak D PillaiNo ratings yet
- Instalation Manual AGB600Document4 pagesInstalation Manual AGB600ADNo ratings yet
- TDA7264 TDA7264A: 25 + 25W Stereo Amplifier With Mute/St-ByDocument12 pagesTDA7264 TDA7264A: 25 + 25W Stereo Amplifier With Mute/St-ByprofrobertounibanNo ratings yet
- Katalog ISKRADocument49 pagesKatalog ISKRABokiNo ratings yet
- Gas Metal Arc Welding Machine Welding Machine: User Manual User ManualDocument40 pagesGas Metal Arc Welding Machine Welding Machine: User Manual User ManualdinescNo ratings yet
- JA Solar JAM5 (L) - 72-200 - SI (200W) Solar PanelDocument2 pagesJA Solar JAM5 (L) - 72-200 - SI (200W) Solar PanelVictor OliveiraNo ratings yet
- RT50FBPN1 XefDocument43 pagesRT50FBPN1 XefsebNo ratings yet
- Pspice ManualDocument121 pagesPspice ManualözlemArtukNo ratings yet
- PR502 DatasheetDocument2 pagesPR502 DatasheetpiruthivirajNo ratings yet