Download as pdf or txt
You might also like
- Physics of Medical X-Ray Imaging (1) Chapter 10: Figure 10.1. Digital Radiographic System DesignDocument21 pagesPhysics of Medical X-Ray Imaging (1) Chapter 10: Figure 10.1. Digital Radiographic System DesignNguyen Cong HuynhNo ratings yet
- Hobart Handler 175 220 VAC MIG Welder User Manual O944 - HobDocument48 pagesHobart Handler 175 220 VAC MIG Welder User Manual O944 - HobrbastaNo ratings yet
- p7 AmmarDocument5 pagesp7 Ammar王越No ratings yet
- Incremental Community Detection in Distributed Dynamic GraphDocument10 pagesIncremental Community Detection in Distributed Dynamic GraphclowntaketwoNo ratings yet
- Query Optimization of Distributed Pattern MatchingDocument12 pagesQuery Optimization of Distributed Pattern MatchingchanoxeneizeNo ratings yet
- A Comparative Survey of Big Data Computing and HPCDocument38 pagesA Comparative Survey of Big Data Computing and HPCsalah nuraNo ratings yet
- Project ReportDocument62 pagesProject ReportPulkit ChauhanNo ratings yet
- Scaling Knowledge Graphs For Automating AI of Digital TwinsDocument17 pagesScaling Knowledge Graphs For Automating AI of Digital TwinsAnmol SinghNo ratings yet
- Big Data Framework For System Health MonitoringDocument10 pagesBig Data Framework For System Health Monitoringmalik shahzad AbdullahNo ratings yet
- 2338 2017 Inffus FusionmrDocument11 pages2338 2017 Inffus FusionmrsergioNo ratings yet
- Case Study SASDocument4 pagesCase Study SASDigital Restu Fadzil HafiziNo ratings yet
- C4-IEEE ParallelRTDocument8 pagesC4-IEEE ParallelRTLordu GamerNo ratings yet
- Synthetic Generation of High Dimensional DatasetDocument8 pagesSynthetic Generation of High Dimensional Datasetmohammad nasir AbdullahNo ratings yet
- Mathematics: Solving Regression Problems With Intelligent Machine Learner For Engineering InformaticsDocument25 pagesMathematics: Solving Regression Problems With Intelligent Machine Learner For Engineering Informaticsleele wolfNo ratings yet
- Top Read Computer Science and InformatioDocument54 pagesTop Read Computer Science and InformatioHuy Bùi TrọngNo ratings yet
- Query Profiler Versus Cache For Skyline Computation: R. D. Kulkarni B. F.MominDocument4 pagesQuery Profiler Versus Cache For Skyline Computation: R. D. Kulkarni B. F.MominRahul SharmaNo ratings yet
- Analysis of Large Graph Partitioning and Frequent Subgraph Mining On Graph DataDocument12 pagesAnalysis of Large Graph Partitioning and Frequent Subgraph Mining On Graph Datajavad.hsadeghiNo ratings yet
- A General Guide To Applying Machine Learning To Computer Architecture - MarkedDocument21 pagesA General Guide To Applying Machine Learning To Computer Architecture - MarkedMohammed Siyad BNo ratings yet
- Credit Card Defaulter DetectionDocument12 pagesCredit Card Defaulter Detectionupdateak47No ratings yet
- Generalized Flow Performance Analysis of Intrusion Detection Using Azure Machine Learning ClassificationDocument6 pagesGeneralized Flow Performance Analysis of Intrusion Detection Using Azure Machine Learning ClassificationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Visual Computing Database: A Platform For Visual Data Processing and Analysis at Internet Scale 1Document17 pagesThe Visual Computing Database: A Platform For Visual Data Processing and Analysis at Internet Scale 1MeenakshiNo ratings yet
- Decision-Guidance Management Systems (DGMS) : Seamless Integration of Data Acquisition, Learning, Prediction, and OptimizationDocument10 pagesDecision-Guidance Management Systems (DGMS) : Seamless Integration of Data Acquisition, Learning, Prediction, and OptimizationEthel Mendoza CandagananNo ratings yet
- Exploring Alternatives To Create Digital Twins FroDocument15 pagesExploring Alternatives To Create Digital Twins Froing.usmansaeedNo ratings yet
- Assessing Deep Generative Models On Time-Series Network Assessing Deep Generative Models On Time-Series Network Data DataDocument19 pagesAssessing Deep Generative Models On Time-Series Network Assessing Deep Generative Models On Time-Series Network Data DataJakub Wojciech WisniewskiNo ratings yet
- Ophidia: Toward Big Data Analytics For EscienceDocument10 pagesOphidia: Toward Big Data Analytics For EsciencehidrobhNo ratings yet
- Divvy - Fast and Intuitive Exploratory Data AnalysisDocument5 pagesDivvy - Fast and Intuitive Exploratory Data AnalysisOlin2kNo ratings yet
- Senger Et Al-2016-Concurrency and Computation Practice and ExperienceDocument4 pagesSenger Et Al-2016-Concurrency and Computation Practice and ExperienceMahalingam RamaswamyNo ratings yet
- A Matrix Math Library For Java: Concurrency: Practice and Experience, Vol. 9 (11), 1127-1137 (November 1997)Document11 pagesA Matrix Math Library For Java: Concurrency: Practice and Experience, Vol. 9 (11), 1127-1137 (November 1997)Lata DeshmukhNo ratings yet
- ShapeNet: An Information-Rich 3D Model RepositoryDocument11 pagesShapeNet: An Information-Rich 3D Model RepositorykensaiiNo ratings yet
- Offline Data-Driven Multiobjective Optimization Knowledge Transfer Between Surrogates and Generation of Final SolutionsDocument15 pagesOffline Data-Driven Multiobjective Optimization Knowledge Transfer Between Surrogates and Generation of Final Solutions刘哲宁No ratings yet
- Comparative Study of Classification Algorithms Based On Mapreduce ModelDocument4 pagesComparative Study of Classification Algorithms Based On Mapreduce Modelpradeepkraj22No ratings yet
- VT Gridce - PsDocument32 pagesVT Gridce - PsssfofoNo ratings yet
- ETH: A Framework For The Design-Space Exploration of Extreme-Scale Scientific VisualizationDocument10 pagesETH: A Framework For The Design-Space Exploration of Extreme-Scale Scientific VisualizationcjchienNo ratings yet
- HadoopViz A MapReduce Framework For Extensible Visualization of Big Spatial DataDocument12 pagesHadoopViz A MapReduce Framework For Extensible Visualization of Big Spatial DatamhdwaliNo ratings yet
- A Map Reduce Based Support Vector Machine For Big Data ClassificationDocument22 pagesA Map Reduce Based Support Vector Machine For Big Data Classificationmayurkh73No ratings yet
- Effective Features To Classify Big Data Using Social Internet of Things-2018Document9 pagesEffective Features To Classify Big Data Using Social Internet of Things-2018Shah AzNo ratings yet
- BASTIAN, Gephi Paper PDFDocument2 pagesBASTIAN, Gephi Paper PDFMarcelo Alves Dos Santos JuniorNo ratings yet
- 2020 Composing High Level Stream ProcessingDocument28 pages2020 Composing High Level Stream ProcessingSofi fuadiNo ratings yet
- Adaptive Clustering For Dynamic IoT Data StreamsDocument11 pagesAdaptive Clustering For Dynamic IoT Data StreamsSAIDCAMARGONo ratings yet
- Ijctt V71i2p105Document7 pagesIjctt V71i2p105EdwardNo ratings yet
- Roma PepperDocument8 pagesRoma Pepper7apesNo ratings yet
- Polaris: A System For Query, Analysis, and Visualization of Multidimensional Relational DatabasesDocument14 pagesPolaris: A System For Query, Analysis, and Visualization of Multidimensional Relational Databaseshc++No ratings yet
- p1281 SharmaDocument12 pagesp1281 SharmaNeo LEE (Jar)No ratings yet
- Incremental Schema MatchingDocument4 pagesIncremental Schema MatchingvthungNo ratings yet
- Mapreduce: Simplified Data Analysis of Big Data: SciencedirectDocument9 pagesMapreduce: Simplified Data Analysis of Big Data: Sciencedirectmfs coreNo ratings yet
- A Case Study of Innovation of An Information Communication System and Upgrade of The Knowledge Base in Industry by ESB, Artificial Intelligence, and Big Data System IntegrationDocument17 pagesA Case Study of Innovation of An Information Communication System and Upgrade of The Knowledge Base in Industry by ESB, Artificial Intelligence, and Big Data System IntegrationAdam HansenNo ratings yet
- Writeback Modeling: Theory and Application To Zipfian WorkloadsDocument14 pagesWriteback Modeling: Theory and Application To Zipfian WorkloadsSudip DasNo ratings yet
- 2018 TensorFlowGraph VASTDocument12 pages2018 TensorFlowGraph VASTyang guNo ratings yet
- Scalable Language Processing Algorithms For The Masses: A Case Study in Computing Word Co-Occurrence Matrices With MapreduceDocument10 pagesScalable Language Processing Algorithms For The Masses: A Case Study in Computing Word Co-Occurrence Matrices With MapreducemurduckNo ratings yet
- Large Graph Models: A Perspective: Ziwei Zhang, Haoyang Li, Zeyang Zhang, Yijian Qin, Xin Wang, Wenwu ZhuDocument23 pagesLarge Graph Models: A Perspective: Ziwei Zhang, Haoyang Li, Zeyang Zhang, Yijian Qin, Xin Wang, Wenwu ZhuChu ChítNo ratings yet
- FHNW Basel Bachelor ThesisDocument6 pagesFHNW Basel Bachelor Thesisdwtcn1jq100% (2)
- Modeling The Mashup Space: Serge Abiteboul - @inria - FR Ohad Greenshpan Tova Milo Milo@tau - Ac.ilDocument8 pagesModeling The Mashup Space: Serge Abiteboul - @inria - FR Ohad Greenshpan Tova Milo Milo@tau - Ac.ilIlir KrasniqiNo ratings yet
- Real Time Object Detection Using CNNDocument5 pagesReal Time Object Detection Using CNNyevanNo ratings yet
- Imagic 96Document8 pagesImagic 96Amar NathNo ratings yet
- A Meta-Stacked Software Bug Prognosticator ClassifierDocument7 pagesA Meta-Stacked Software Bug Prognosticator ClassifierJexiaNo ratings yet
- Visualizing Dataflow Graphs of Deep Learning Models in TensorflowDocument12 pagesVisualizing Dataflow Graphs of Deep Learning Models in TensorflowRamdani AgusmanNo ratings yet
- Research 5 - Third SampleDocument10 pagesResearch 5 - Third SampleMaheswaran BaskaranNo ratings yet
- Eth Informatik Bachelor ThesisDocument6 pagesEth Informatik Bachelor ThesisCollegePaperHelpFargo100% (2)
- Abstracts For Analyzing With Answers 1-16Document9 pagesAbstracts For Analyzing With Answers 1-16Hồ ToànNo ratings yet
- Background: Research and EvolutionDocument6 pagesBackground: Research and Evolutionddeevviii3646No ratings yet
- Techniques For Simulation of Realistic Infrastructure Wireless Network TrafficDocument10 pagesTechniques For Simulation of Realistic Infrastructure Wireless Network TrafficA.K.M.TOUHIDUR RAHMANNo ratings yet
- Juki HZL-350Z Series Sewing Machine Service ManualDocument35 pagesJuki HZL-350Z Series Sewing Machine Service ManualiliiexpugnansNo ratings yet
- 36 DCOOP Khashidhouse FINAL PDFDocument17 pages36 DCOOP Khashidhouse FINAL PDFbharathvarma100% (1)
- Quality Assurance Handbook 1677275668Document140 pagesQuality Assurance Handbook 1677275668r2mgt28ssvNo ratings yet
- SE Internal Examination Time Table - Sem - I - 2023-24Document1 pageSE Internal Examination Time Table - Sem - I - 2023-24Prathamesh BhavsarNo ratings yet
- Gardner-Denver@: Triplex PlungerDocument38 pagesGardner-Denver@: Triplex PlungerLibardo Alfonso Cadena Rodriguez100% (1)
- TEPEx Catalog en 2016-2017Document130 pagesTEPEx Catalog en 2016-2017rmuzeNo ratings yet
- 1st Sem ResultDocument280 pages1st Sem ResultHardik SethNo ratings yet
- Subject: ACI-ICAO Implementing Annex 14 Course: (Cairo, Egypt, 28 June - 2 July 2020)Document2 pagesSubject: ACI-ICAO Implementing Annex 14 Course: (Cairo, Egypt, 28 June - 2 July 2020)Osama SharafNo ratings yet
- Offshore Mag1 PrintDocument44 pagesOffshore Mag1 PrintRidho ZiskaNo ratings yet
- SAS Slides 6: ArraysDocument7 pagesSAS Slides 6: ArraysSASTechiesNo ratings yet
- Refinerygasanalyzer - Brochure - Rev1-1115 - A4 PACDocument4 pagesRefinerygasanalyzer - Brochure - Rev1-1115 - A4 PACMiguelNo ratings yet
- Cable-Catalogue BR enDocument72 pagesCable-Catalogue BR enmuhammedNo ratings yet
- Violence in Digital Communication Social Media Through TH - 2023 - MeasurementDocument7 pagesViolence in Digital Communication Social Media Through TH - 2023 - MeasurementFelix PhilipNo ratings yet
- Boq PoolDocument2 pagesBoq PoolShaikh AafrinNo ratings yet
- Call For Papers Special Topic of Journal of Forensic Accounting ResearchDocument2 pagesCall For Papers Special Topic of Journal of Forensic Accounting ResearchytrNo ratings yet
- Assignment - 4 - Risk Response, Contingency and ControlDocument4 pagesAssignment - 4 - Risk Response, Contingency and Controlsandeepca14.92No ratings yet
- EDR Design Guidelines VAVDocument331 pagesEDR Design Guidelines VAVMarcel TurkNo ratings yet
- Siemens SIMATIC PCS 7Document3 pagesSiemens SIMATIC PCS 7JemeraldNo ratings yet
- GROUP 4 REPORT (Ethical Dilemmas Google Clip & Sentencing Software)Document22 pagesGROUP 4 REPORT (Ethical Dilemmas Google Clip & Sentencing Software)Cathrena DequinaNo ratings yet
- Weaknesses in The Key Scheduling Algorithm of RC4Document24 pagesWeaknesses in The Key Scheduling Algorithm of RC4Sigifredo Segundo Thomas CampoNo ratings yet
- Binary and Decimal NumbersDocument64 pagesBinary and Decimal NumbersBijay MishraNo ratings yet
- Ms Excel Mastery 2020Document5 pagesMs Excel Mastery 2020Shubham KabraNo ratings yet
- Petrel Manual: Vshale CalculationDocument20 pagesPetrel Manual: Vshale CalculationEmira ZrelliNo ratings yet
- NPTEL Phase II - Civil Engineering - NOC - GPS SURVEYINGDocument1 pageNPTEL Phase II - Civil Engineering - NOC - GPS SURVEYINGAmit KumarNo ratings yet
- TIF D Nur Hakiki Damayanti E41202305 Practicum 12Document5 pagesTIF D Nur Hakiki Damayanti E41202305 Practicum 12yuliana dewiNo ratings yet
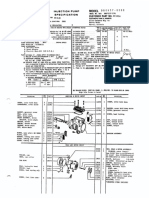
- Customer Part No. 4514954: Injection Pump Specification Model Ik) DelDocument2 pagesCustomer Part No. 4514954: Injection Pump Specification Model Ik) DeldieselmotorsbogotasasNo ratings yet
- Sesi 13-Merancang Presentasi Oral Dan OnlineDocument42 pagesSesi 13-Merancang Presentasi Oral Dan OnlineMuhammad RaihanNo ratings yet
- JQ International Construction, IncDocument2 pagesJQ International Construction, Incyael rodriguez100% (1)