Download as pdf or txt
You might also like
- Introduction To DC Machine: by Dr. Shubhobrata RudraDocument129 pagesIntroduction To DC Machine: by Dr. Shubhobrata RudraBhabani sankar KishanNo ratings yet
- DC Motor Are of 3 Types They Are .Document12 pagesDC Motor Are of 3 Types They Are .Krishna100% (2)
- D. P. Sen Gupta, J. W. Lynn (Auth.) - Electrical Machine Dynamics-Macmillan Education UK (1980)Document310 pagesD. P. Sen Gupta, J. W. Lynn (Auth.) - Electrical Machine Dynamics-Macmillan Education UK (1980)Jay Acer100% (5)
- Lecture 7 DC MachinesDocument16 pagesLecture 7 DC MachinesMohamed HosamNo ratings yet
- DC Machines: Saravanan T Y Assistant Professor EEE Department Nararana Engineering College GudurDocument34 pagesDC Machines: Saravanan T Y Assistant Professor EEE Department Nararana Engineering College GudurSaravanan T YNo ratings yet
- Module 3-1Document53 pagesModule 3-1anishdeshmukh108No ratings yet
- BEE (21EEE15A) Module 3BDocument49 pagesBEE (21EEE15A) Module 3BG46Anand P KNo ratings yet
- Unit-II PPT CPNDocument164 pagesUnit-II PPT CPNBifrost KingNo ratings yet
- DC Generator and Motor PDFDocument20 pagesDC Generator and Motor PDFmilan subediNo ratings yet
- DC GeneratorDocument38 pagesDC Generatoraswardi8756No ratings yet
- Unit 3Document88 pagesUnit 3thamizhan4341No ratings yet
- DC GeneratorsDocument33 pagesDC Generatorsdallisrinivas14No ratings yet
- Basics and Working of AC Motors & Basics of Power GeneratorDocument37 pagesBasics and Working of AC Motors & Basics of Power GeneratorYasir ShaikhNo ratings yet
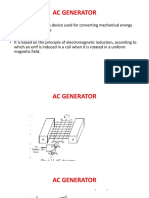
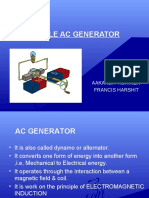
- AC GeneratorDocument37 pagesAC GeneratorS. Dinesh KumarNo ratings yet
- Unit 2 - Electrical Machines (2021!11!28 06-07-55 UTC)Document50 pagesUnit 2 - Electrical Machines (2021!11!28 06-07-55 UTC)bachime13No ratings yet
- Simple Ac GeneratorDocument17 pagesSimple Ac GeneratorRishi singhNo ratings yet
- Chapter 4 - DC MachineDocument82 pagesChapter 4 - DC Machinepsksiva13No ratings yet
- DC Generators PPT 3974378 (Rujuk)Document93 pagesDC Generators PPT 3974378 (Rujuk)Mahesvaran SubramaniamNo ratings yet
- Introduction To Electrical Machines: Prepared and Presented By: Syeda Amina AsgharDocument27 pagesIntroduction To Electrical Machines: Prepared and Presented By: Syeda Amina Asgharانیس ب ٹNo ratings yet
- Electric Machine: Dr. Shorouk OssamaDocument28 pagesElectric Machine: Dr. Shorouk OssamaYasir ButtNo ratings yet
- AlternatorDocument32 pagesAlternatorTamjid KabirNo ratings yet
- Chapter 1: Introduction To Electrical Machines Acm 03 - DC and Ac MachineryDocument14 pagesChapter 1: Introduction To Electrical Machines Acm 03 - DC and Ac MachineryGlaze GregorioNo ratings yet
- Rotating Machines and Transformers Unit 2 DC GENERATOR CLASS NOTESDocument70 pagesRotating Machines and Transformers Unit 2 DC GENERATOR CLASS NOTESSEDHURAJA SNo ratings yet
- Introduction To DC MachineDocument134 pagesIntroduction To DC MachineBharat SinghNo ratings yet
- Three Phase Synchronous MachinesDocument41 pagesThree Phase Synchronous MachinesMausam BasnetNo ratings yet
- Electrical Motor (1) DDocument20 pagesElectrical Motor (1) Drksamy0102No ratings yet
- EEN 112 - Unit 7Document63 pagesEEN 112 - Unit 7MRIDUL SHARMANo ratings yet
- Electrical Motors: ECE131 Basic Electrical & Electronics EnggDocument58 pagesElectrical Motors: ECE131 Basic Electrical & Electronics EnggVinamra MittalNo ratings yet
- Elementary GeneratorsDocument27 pagesElementary GeneratorsShiela SalvillaNo ratings yet
- Basic Principles of Machine OperationDocument94 pagesBasic Principles of Machine OperationRashmi SharmaNo ratings yet
- Basics of Electrical MachinesDocument11 pagesBasics of Electrical MachinesKrishna YadavNo ratings yet
- BEEE e Content Unit 2 DC Gene and DC MotorDocument80 pagesBEEE e Content Unit 2 DC Gene and DC MotorSIVAPRASAD KOLLATI GIEREEE100% (1)
- Basic Construction and Working of A DC GeneratorDocument15 pagesBasic Construction and Working of A DC GeneratorAnonymous QcCCBsNo ratings yet
- DC GeneratorDocument14 pagesDC GeneratorGlen DangaranNo ratings yet
- Ac GeneratorDocument17 pagesAc Generatordineshsilambam2305No ratings yet
- Chapter 3 - Charging - SystemDocument59 pagesChapter 3 - Charging - SystemEyasu demsewNo ratings yet
- Induction Motor (Part 1)Document24 pagesInduction Motor (Part 1)Niha chowdhuryNo ratings yet
- DC Generator: Unit - 3Document17 pagesDC Generator: Unit - 3sasirekhaNo ratings yet
- Topic 6 - Rotating MachinesDocument43 pagesTopic 6 - Rotating MachinesFarai MasooNo ratings yet
- Unit 4Document76 pagesUnit 4Mohit BagurNo ratings yet
- Ee322 Synchornous MachinesDocument104 pagesEe322 Synchornous MachinesDela Cruz MelvinNo ratings yet
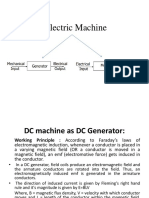
- Electric MachineDocument14 pagesElectric MachineShivashreeNo ratings yet
- Unit IiDocument25 pagesUnit Iistoryteller9059517061No ratings yet
- Module IiDocument14 pagesModule Iisarath.mNo ratings yet
- Construction of Machine PDFDocument110 pagesConstruction of Machine PDFAvinash SinghNo ratings yet
- Electrical Assignment 15-12-2018Document15 pagesElectrical Assignment 15-12-2018Mudasir SahoNo ratings yet
- DC MachinesDocument20 pagesDC MachinesELON MUSKNo ratings yet
- Module 4Document25 pagesModule 4Rohit AnejaNo ratings yet
- AC Machine Lecture No6Document43 pagesAC Machine Lecture No6Mohammed Dyhia AliNo ratings yet
- Em 161013085654Document20 pagesEm 161013085654prashantkumar chinamalliNo ratings yet
- Electrical MotorsDocument170 pagesElectrical MotorsgayathrikanduriNo ratings yet
- Automotive Charging SystemDocument59 pagesAutomotive Charging SystemRaja HopeNo ratings yet
- EE-101 (Unit-5)Document81 pagesEE-101 (Unit-5)Chauhan AyushmaanNo ratings yet
- DC MachinesDocument33 pagesDC Machinesroomdrive04No ratings yet
- Unit 2Document85 pagesUnit 2Naitik NavyNo ratings yet
- Komutator ADocument38 pagesKomutator AteknikkimiaNo ratings yet
- Ayush Kashyav Professional PracticeDocument21 pagesAyush Kashyav Professional PracticeDEZ Automation And ControlNo ratings yet
- EM CH-4-5-6 Ac MachinesDocument80 pagesEM CH-4-5-6 Ac Machinesmuhammad.anas2007No ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Dynamos and Electric Motors - How to Make and Run ThemFrom EverandDynamos and Electric Motors - How to Make and Run ThemRating: 5 out of 5 stars5/5 (2)
- Certificate of Completion: Kotakonda Jairaj MaharishiDocument2 pagesCertificate of Completion: Kotakonda Jairaj MaharishiAarush PitlaNo ratings yet
- Aa Rùocks/Kaa Aa Rùocks/Kaa Aa Rùocks/Kaa Aa Rùocks/Kaa Aa Rùocks/KaaDocument7 pagesAa Rùocks/Kaa Aa Rùocks/Kaa Aa Rùocks/Kaa Aa Rùocks/Kaa Aa Rùocks/KaaAarush PitlaNo ratings yet
- Notification I Year II Sem Regular & Supplementary Exmns R22 DT 26 Mar 2024Document1 pageNotification I Year II Sem Regular & Supplementary Exmns R22 DT 26 Mar 2024Aarush PitlaNo ratings yet
- TransformersDocument23 pagesTransformersAarush PitlaNo ratings yet
- BEE Important QuestionsDocument2 pagesBEE Important QuestionsAarush PitlaNo ratings yet
- Adobe Scan 09 Mar 2024Document36 pagesAdobe Scan 09 Mar 2024Aarush PitlaNo ratings yet
- PPS - 2 NotesDocument38 pagesPPS - 2 NotesAarush PitlaNo ratings yet
- Synergy Circular Au 24Document1 pageSynergy Circular Au 24Aarush PitlaNo ratings yet
- Assignment IIDocument1 pageAssignment IIAarush PitlaNo ratings yet
- Microbot 10x6 New Mini DroneDocument1 pageMicrobot 10x6 New Mini DroneAarush PitlaNo ratings yet
- M 1Document174 pagesM 1Aarush PitlaNo ratings yet
- I-B.tech-Ii-Semester Time Table 18.01.2024Document17 pagesI-B.tech-Ii-Semester Time Table 18.01.2024Aarush PitlaNo ratings yet
- Els Lab Manual Exercise-IiDocument14 pagesEls Lab Manual Exercise-IiAarush PitlaNo ratings yet
- DEV HEX PRY VAR-ModelDocument1 pageDEV HEX PRY VAR-ModelAarush PitlaNo ratings yet
- PEE Unit-4 NotesDocument37 pagesPEE Unit-4 Notes322103312181 SAI ANAND MEDAPATINo ratings yet
- Prof. Ajay B. Balar: Darshan Institute of Engineering & Technology, Rajkot (Gujarat)Document34 pagesProf. Ajay B. Balar: Darshan Institute of Engineering & Technology, Rajkot (Gujarat)k rajendraNo ratings yet
- Motor Ac Vs DC MotorDocument2 pagesMotor Ac Vs DC MotorRendi Bagus PratamaNo ratings yet
- Introductory: Capacity They Momentarily Interrupt TheyDocument19 pagesIntroductory: Capacity They Momentarily Interrupt Theysravani dhulipallaNo ratings yet
- Lecture 1 - Electrical Machines .PPT (Compatibility Mode) - 1Document6 pagesLecture 1 - Electrical Machines .PPT (Compatibility Mode) - 1Mona SayedNo ratings yet
- Gs Generator TroubleshootingDocument38 pagesGs Generator Troubleshootingகோவி கோபால் ஆர்ட்ஸ்No ratings yet
- Operating Instructions 1la8 pq8 3 Phase Induction MotorDocument30 pagesOperating Instructions 1la8 pq8 3 Phase Induction Motorsanthosh shettyNo ratings yet
- August 2012Document19 pagesAugust 2012MIRA JHON MICHAELNo ratings yet
- SAG Drive SelectionDocument8 pagesSAG Drive SelectionStefan BerbeceNo ratings yet
- 15ED501 - LEectrical Machine Design CO PO ATTAINMENTDocument5 pages15ED501 - LEectrical Machine Design CO PO ATTAINMENTSumathi A - PSGCTNo ratings yet
- Electrical Equipment Reneable Energy 2022 LectureDocument25 pagesElectrical Equipment Reneable Energy 2022 Lecturecharbel jabbourNo ratings yet
- Basics of Electrical Engineering - S. SharmaDocument327 pagesBasics of Electrical Engineering - S. SharmaMarcos Vinícius de Sousa SilvaNo ratings yet
- Electrical SetDocument8 pagesElectrical SetsayedNo ratings yet
- Cod.380S.B: Instruction ManualDocument24 pagesCod.380S.B: Instruction Manualamskroud brahimNo ratings yet
- 2Document4 pages2Arnel Pamaos Lopiba MontañezNo ratings yet
- EE24 Design of Variable Speed Drive For Induction Motor Using VF ControlDocument4 pagesEE24 Design of Variable Speed Drive For Induction Motor Using VF ControlMechWindNaniNo ratings yet
- Manual - Driver INDEL1Document12 pagesManual - Driver INDEL1Marcelo LescanoNo ratings yet
- Contoh Report Final Year Projek PoliteknikDocument60 pagesContoh Report Final Year Projek PoliteknikSyfull musicNo ratings yet
- Questions On Induction MachinesDocument127 pagesQuestions On Induction Machineskibrom atsbhaNo ratings yet
- Micno KE300 User Manual V2.0Document171 pagesMicno KE300 User Manual V2.0Danny Espinoza Castro89% (9)
- Course Outline For Introduction To MachineDocument3 pagesCourse Outline For Introduction To MachineyodaheNo ratings yet
- Linear Induction MotorDocument28 pagesLinear Induction MotorchethanNo ratings yet
- Speed Control of Three Phase Induction Motor Using Arduino and V/F TechniqueDocument10 pagesSpeed Control of Three Phase Induction Motor Using Arduino and V/F TechniqueAnonymous oyUAtpKNo ratings yet
- Project Proposal 11Document15 pagesProject Proposal 11wondi BETNo ratings yet
- Hum BirdDocument179 pagesHum BirdSuman ChhetryNo ratings yet
- Induction Motors Faults Detection Based On Instantaneous Power Spectrum Analysis With Elimination of The Supply Mains InfluenceDocument11 pagesInduction Motors Faults Detection Based On Instantaneous Power Spectrum Analysis With Elimination of The Supply Mains InfluenceIDESNo ratings yet
- Arijit Amd Assaingment-1Document21 pagesArijit Amd Assaingment-1Arijit DasNo ratings yet
- OPENLAB A - No-Load Test of The Asynchronous MotorDocument19 pagesOPENLAB A - No-Load Test of The Asynchronous MotorjonNo ratings yet
- Ee 2022Document9 pagesEe 2022LATIGAR, JEFFERSON 0.No ratings yet