Download as docx, pdf, or txt
You might also like
- NCR ATM Service Aid Manual From WWWDocument67 pagesNCR ATM Service Aid Manual From WWWanon_69018194129% (7)
- IRJMETS40300087641Document3 pagesIRJMETS4030008764138 aarti dhageNo ratings yet
- Fin Irjmets1646477384Document4 pagesFin Irjmets1646477384prathanastationeryNo ratings yet
- Blind Stick Using Ultrasonic Sensor With Voice AnnouncementDocument5 pagesBlind Stick Using Ultrasonic Sensor With Voice AnnouncementIJRASETPublicationsNo ratings yet
- A Research Paper On Smart Blind StickDocument6 pagesA Research Paper On Smart Blind StickIJRASETPublicationsNo ratings yet
- Integrated Smart Shoe For Blind People: M.V.S.Divija, M.Rohitha, Meghana.T, Monisha.H, Prof - RaveendraDocument5 pagesIntegrated Smart Shoe For Blind People: M.V.S.Divija, M.Rohitha, Meghana.T, Monisha.H, Prof - RaveendraSachin ShivannavarNo ratings yet
- Walchand College of Engineering, Sangli.: Smart Eye Glass For Blind People Using IOTDocument8 pagesWalchand College of Engineering, Sangli.: Smart Eye Glass For Blind People Using IOTSanket FulmaliNo ratings yet
- Minor Project 1212Document34 pagesMinor Project 1212himangi thakurNo ratings yet
- Third Eye For Blind FormatDocument4 pagesThird Eye For Blind FormatMohd Shahrom IsmailNo ratings yet
- Third Vision For BlindsDocument6 pagesThird Vision For BlindsIJRASETPublicationsNo ratings yet
- Obstacle Avoiding Robot A ReviewDocument6 pagesObstacle Avoiding Robot A ReviewIJRASETPublicationsNo ratings yet
- Fin Irjmets1686974243Document5 pagesFin Irjmets1686974243A.M.B M.B.M.ENo ratings yet
- Hurddle Detection For Special (Blind) PeopleDocument6 pagesHurddle Detection For Special (Blind) PeopleIJRASETPublicationsNo ratings yet
- Savvy Gadget For Visually ChallengedDocument5 pagesSavvy Gadget For Visually ChallengedIJRASETPublicationsNo ratings yet
- Blind Man Stick Using Programmable Interrupt Controller (PIC)Document6 pagesBlind Man Stick Using Programmable Interrupt Controller (PIC)Kurnia Adi WibowoNo ratings yet
- Design and Implement A Smart Blind StickDocument7 pagesDesign and Implement A Smart Blind StickbizunehNo ratings yet
- Obstacle Detection For Blind People Using GlassesDocument5 pagesObstacle Detection For Blind People Using GlassesganeshNo ratings yet
- A Smart Wearable Guiding Device For The Visually Impaired PeopleDocument7 pagesA Smart Wearable Guiding Device For The Visually Impaired PeopleIJRASETPublicationsNo ratings yet
- Security System Using ArduinoDocument4 pagesSecurity System Using ArduinoHalifa AhmadNo ratings yet
- Multi-Functional Blind Stick For Visually Impaired PeopleDocument9 pagesMulti-Functional Blind Stick For Visually Impaired PeopleIJRASETPublicationsNo ratings yet
- Arduino Based Smart Blind Stick Using Ultrasonic Sensor PresentationDocument18 pagesArduino Based Smart Blind Stick Using Ultrasonic Sensor PresentationMr SHINIGAMINo ratings yet
- Public Awareness Robot SylvesterDocument13 pagesPublic Awareness Robot SylvesterIJRASETPublicationsNo ratings yet
- Electronic Stick For Visually Impaired People Using GSM and GPS TrackingDocument64 pagesElectronic Stick For Visually Impaired People Using GSM and GPS TrackingShree KanthNo ratings yet
- Smart Blind Stick Using ArduinoDocument7 pagesSmart Blind Stick Using ArduinoiyoasNo ratings yet
- Mini Project 6th SEMDocument24 pagesMini Project 6th SEMInvincible 2.0No ratings yet
- Smart Electronic Walking Stick For Blind PeopleDocument7 pagesSmart Electronic Walking Stick For Blind PeopleTIMON KIPRONONo ratings yet
- Smart Blind Stick ProjectDocument15 pagesSmart Blind Stick ProjectYoungsterNo ratings yet
- Isi ThesisDocument52 pagesIsi ThesisAffan MUstaffaNo ratings yet
- Smart and Cost-Effective Device For Visually Impaired PeopleDocument5 pagesSmart and Cost-Effective Device For Visually Impaired PeopleajiNo ratings yet
- Third Eye For Blind Using Ultrasonic Sensor Vibrator GloveDocument5 pagesThird Eye For Blind Using Ultrasonic Sensor Vibrator GloveResearch ParkNo ratings yet
- Hand Assistive Device For Physically Challenged PeopleDocument6 pagesHand Assistive Device For Physically Challenged PeopleIJRASETPublicationsNo ratings yet
- Social Distancing Indicator and Alarming SystemDocument14 pagesSocial Distancing Indicator and Alarming SystemMayureshNo ratings yet
- Ultrasonic Sensor Based Smart Cap As EleDocument5 pagesUltrasonic Sensor Based Smart Cap As ElerahuNo ratings yet
- Smart Cap Research PaperDocument9 pagesSmart Cap Research PaperPPLM MuntilanNo ratings yet
- Paper 1025Document4 pagesPaper 1025Ankitha ShettyNo ratings yet
- SmartblindstickDocument5 pagesSmartblindstickSatyam kumar SinghNo ratings yet
- Design and Implement A Smart Blind Stick: Journal of Advanced Research in Dynamical and Control Systems August 2019Document7 pagesDesign and Implement A Smart Blind Stick: Journal of Advanced Research in Dynamical and Control Systems August 2019gagagagNo ratings yet
- Smart Glass For Blind PeopleDocument9 pagesSmart Glass For Blind PeopleGet InspiredNo ratings yet
- Blind Stick ElkayDocument31 pagesBlind Stick Elkayoladoyo007No ratings yet
- Synopsis THIRD EYE FOR THE BLINDDocument23 pagesSynopsis THIRD EYE FOR THE BLINDNirjhar FilmsNo ratings yet
- Monitoring The Health of The Alzheimers Patients and Geofencing Their LocationDocument8 pagesMonitoring The Health of The Alzheimers Patients and Geofencing Their LocationIJRASETPublicationsNo ratings yet
- Smart Blind StickDocument4 pagesSmart Blind StickInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart White Cane - An Elegant and Economic Walking AidDocument6 pagesSmart White Cane - An Elegant and Economic Walking AidAJER JOURNALNo ratings yet
- Sensing The Environment With Sensors A Smart Wearable Band For Obstacle Detection For The Visually ImpairedDocument8 pagesSensing The Environment With Sensors A Smart Wearable Band For Obstacle Detection For The Visually ImpairedIJRASETPublicationsNo ratings yet
- JETIR1907J03Document5 pagesJETIR1907J03Iram KhanNo ratings yet
- AXI2OCP Bridge VerificationDocument8 pagesAXI2OCP Bridge VerificationIJRASETPublicationsNo ratings yet
- Minorproject 124Document28 pagesMinorproject 124Mahak PatelNo ratings yet
- IOT Based Assistive Technologies For Visually Impaired PersonsDocument6 pagesIOT Based Assistive Technologies For Visually Impaired PersonsMunya RushambwaNo ratings yet
- DfajdfaDocument4 pagesDfajdfasofayo9217No ratings yet
- Seventh Sem Project ReportttttDocument6 pagesSeventh Sem Project ReportttttDishaNo ratings yet
- Smart Walking Stick For Visually Impaired People U PDFDocument13 pagesSmart Walking Stick For Visually Impaired People U PDFTikam SuvasiyaNo ratings yet
- Designand Implementationofa Smart Hand Sanitizer Dispenserwith Door Controllerusing ATMEGA328 PDocument6 pagesDesignand Implementationofa Smart Hand Sanitizer Dispenserwith Door Controllerusing ATMEGA328 PProfessor .1No ratings yet
- Smart Stick For Visually ImpairedDocument6 pagesSmart Stick For Visually ImpairedAnonymous izrFWiQNo ratings yet
- 19 Ijmtst0706111Document6 pages19 Ijmtst0706111Kavya SreeNo ratings yet
- 20mis0106 VL2023240102507 Pe003Document15 pages20mis0106 VL2023240102507 Pe003Kartik SoniNo ratings yet
- Blind PDFDocument6 pagesBlind PDFNelarapuMaheshNo ratings yet
- Blind Walking StickDocument8 pagesBlind Walking StickJayWinnerNo ratings yet
- Stick For Helping The Blind PersonDocument6 pagesStick For Helping The Blind PersonIJRASETPublicationsNo ratings yet
- Hand Gesture Controlling SystemDocument8 pagesHand Gesture Controlling SystemIJRASETPublicationsNo ratings yet
- Wearable DevicesDocument20 pagesWearable DevicesPrathamesh ChopadeNo ratings yet
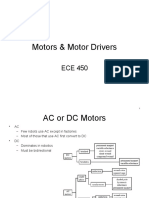
- 02-Motors & Motor DriversDocument25 pages02-Motors & Motor DriversJO MarthenNo ratings yet
- Debre Markos Institute of Technology: Fundamentals of Electrical Engineering (ECEG 1071)Document52 pagesDebre Markos Institute of Technology: Fundamentals of Electrical Engineering (ECEG 1071)Footkball 1No ratings yet
- A Project On A Statistical Analysis of The OTT Platform Business in Bangladesh-ReportDocument24 pagesA Project On A Statistical Analysis of The OTT Platform Business in Bangladesh-ReportNayeem Ahamed AdorNo ratings yet
- Rogue Wireless AP Detection Using Delay Fluctuation in Backbone NetworkDocument2 pagesRogue Wireless AP Detection Using Delay Fluctuation in Backbone NetworkbloghunterzNo ratings yet
- Gopertz Growth Curve, Linear Co-EfficientDocument17 pagesGopertz Growth Curve, Linear Co-EfficientAmal DattaNo ratings yet
- Corroded Pipeline AssesmentDocument29 pagesCorroded Pipeline AssesmentIrsyad RosyidiNo ratings yet
- Virtual Broadband Network Gateway (VBNG) : Key HighlightsDocument4 pagesVirtual Broadband Network Gateway (VBNG) : Key HighlightssarabjitsgNo ratings yet
- BWI BrandGuide2021Document14 pagesBWI BrandGuide2021sunny seeNo ratings yet
- FC 360 New Programming GuideDocument126 pagesFC 360 New Programming GuidePrasadNo ratings yet
- Shaun of The Dead (Shots)Document11 pagesShaun of The Dead (Shots)mattdalbyNo ratings yet
- Java Lab Assignment-4Document27 pagesJava Lab Assignment-4manasi kumbharNo ratings yet
- Input Output Symbolic Transition Systems EnrichedDocument25 pagesInput Output Symbolic Transition Systems EnrichedAlexey AbakumovNo ratings yet
- 1:1 Combustion Engine: Steiner 3DDocument1 page1:1 Combustion Engine: Steiner 3DinformationbankNo ratings yet
- Risk Study Jet Propulsion LabDocument4 pagesRisk Study Jet Propulsion LabGaneshNo ratings yet
- User Guide BEEP AND PARKDocument9 pagesUser Guide BEEP AND PARKzxsdfNo ratings yet
- Geoffrey BawaDocument17 pagesGeoffrey BawaTousif ShaikhNo ratings yet
- TCS PaperDocument393 pagesTCS Papernikky2u20No ratings yet
- Solar 200 - Solar 300N - I-V 400 - Solar I-V - MPP 300 - Tht41Document16 pagesSolar 200 - Solar 300N - I-V 400 - Solar I-V - MPP 300 - Tht41luciano_gularteNo ratings yet
- Hexagon Documentation Site Export-3Document100 pagesHexagon Documentation Site Export-3Alberto VELOSA ROANo ratings yet
- MondayDocument21 pagesMondayKormaw FilfiluNo ratings yet
- Costs Less Lasts Longer: Hot-Dip GalvanizingDocument12 pagesCosts Less Lasts Longer: Hot-Dip GalvanizingEng-Ahmed AllamNo ratings yet
- OFC QualityDocument2 pagesOFC QualityAditya PrakashNo ratings yet
- Tugas Meeting Ke-4 (Siti Muniroh Nurul Aini)Document2 pagesTugas Meeting Ke-4 (Siti Muniroh Nurul Aini)Arroh NurulaynyNo ratings yet
- BMW Acronyms ListDocument9 pagesBMW Acronyms ListVincentNo ratings yet
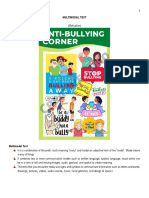
- Multimodal TextDocument10 pagesMultimodal TextHat DogNo ratings yet
- NCR MLA MediaInfoLit M2 - L2 The Evolution of Traditional To New Media - v11 RevisedDocument20 pagesNCR MLA MediaInfoLit M2 - L2 The Evolution of Traditional To New Media - v11 RevisedKryzel Lho EspanaNo ratings yet
- 10 сынып сор 7 юнит 4 ттоксанDocument3 pages10 сынып сор 7 юнит 4 ттоксанbbbbbNo ratings yet
- New Zealand Mobile & Mobile Broadband TrainingDocument11 pagesNew Zealand Mobile & Mobile Broadband TrainingAbdulqader HNo ratings yet
- Integrated Circuits-Basic Electronics (Presentation)Document34 pagesIntegrated Circuits-Basic Electronics (Presentation)Iqra TabassumNo ratings yet