Download as pdf or txt
You might also like
- Honda CRV CR-V Radio Connector PinsDocument17 pagesHonda CRV CR-V Radio Connector Pinsdonald nugrahaNo ratings yet
- ZAMIL PY Series Installation, Operation & Maintenance ManualDocument33 pagesZAMIL PY Series Installation, Operation & Maintenance Manualambuenaflor70% (10)
- Boss GT-10 Service ManualDocument44 pagesBoss GT-10 Service ManualAlmir de MouraNo ratings yet
- Start Up Routine: Field Component ManualDocument12 pagesStart Up Routine: Field Component Manualihwisso100% (5)
- Manual PCV2 2 EnglishDocument9 pagesManual PCV2 2 EnglishTesla Ec100% (1)
- Onkyo TX-NR828 Service Manual PDFDocument99 pagesOnkyo TX-NR828 Service Manual PDFJaro100% (2)
- Kent Hovind - WorkbookDocument80 pagesKent Hovind - WorkbookMagnentius60% (5)
- Trucking Company List 2021Document16 pagesTrucking Company List 2021Deep RennovatorsNo ratings yet
- CD30/35 MANUAL & Start Guide: For Use On PPM Electromagnetic Equipment VF Advance VF Premier Mini VF VFX MagnatronDocument21 pagesCD30/35 MANUAL & Start Guide: For Use On PPM Electromagnetic Equipment VF Advance VF Premier Mini VF VFX Magnatronkawa saki75% (4)
- Sperre PDFDocument28 pagesSperre PDFluis100% (2)
- Gba26800bbi Fc1 Service Pandel Board-2Document22 pagesGba26800bbi Fc1 Service Pandel Board-2Peter94% (16)
- Dubai World Ehs - 2007 Regulations & StandardsDocument106 pagesDubai World Ehs - 2007 Regulations & StandardsSAYED100% (10)
- Anatomy and Physiology TestDocument5 pagesAnatomy and Physiology TestPao Parel100% (1)
- Ovf20 Startup RoutineDocument14 pagesOvf20 Startup RoutineRaja DuraiNo ratings yet
- Gba 26800 H II Startup PDFDocument15 pagesGba 26800 H II Startup PDFJms QuinteroNo ratings yet
- Start Up Routine OVF10 PDFDocument12 pagesStart Up Routine OVF10 PDFEng M ElseaidyNo ratings yet
- Service Bulletin: Addition of Total Counter (Spare Part)Document4 pagesService Bulletin: Addition of Total Counter (Spare Part)AlPovNo ratings yet
- STUP MCBDocument18 pagesSTUP MCBNour BenNo ratings yet
- Brake Release BleDocument13 pagesBrake Release Bleyoussef akrkawNo ratings yet
- Pulse Generator A860-0201-T001 Fanuc DatasheetDocument7 pagesPulse Generator A860-0201-T001 Fanuc DatasheetDany HernandezNo ratings yet
- MCB STMDocument33 pagesMCB STMyoussef akrkawNo ratings yet
- Gba 26800 H II StartupDocument15 pagesGba 26800 H II StartupPeter100% (4)
- TransmisionDocument2 pagesTransmisionAlvaro Escalona GtzNo ratings yet
- Working-Final Drws 2nd Issue MEDocument153 pagesWorking-Final Drws 2nd Issue MEVladimirNo ratings yet
- Emergency ShutingdownDocument11 pagesEmergency ShutingdownOsama OmayerNo ratings yet
- Cac+ Rac Submittal-A4848Document179 pagesCac+ Rac Submittal-A4848MUBASHIRNo ratings yet
- 160.80-RP3!3!07 YS Style E Optiview Control CenterDocument12 pages160.80-RP3!3!07 YS Style E Optiview Control CenterCheetah JimNo ratings yet
- MOL Power Calculation 1Document1 pageMOL Power Calculation 1kaunghtetoo.kho2023No ratings yet
- Focusarc P SeriesDocument28 pagesFocusarc P Series裴兆奇No ratings yet
- Service Manual For LOMO R410A 60Hz On Off 9K 12KDocument64 pagesService Manual For LOMO R410A 60Hz On Off 9K 12KArlex Ricardo Guillen PetitNo ratings yet
- Lennox Service Manual For 23SEER Inverter CODocument116 pagesLennox Service Manual For 23SEER Inverter COLuis AsfuraNo ratings yet
- 1215 033 PDFDocument2 pages1215 033 PDFoleg-spbNo ratings yet
- Canon NP6216Document7 pagesCanon NP6216Ioas IodfNo ratings yet
- Emanagebasicoperation PDFDocument23 pagesEmanagebasicoperation PDFanthony dizonNo ratings yet
- RELAYDocument33 pagesRELAYJimmy Durand LunaNo ratings yet
- KT Controller Manual - M45-75Document30 pagesKT Controller Manual - M45-75Ben RichterjorkNo ratings yet
- LB070W02 HSDocument36 pagesLB070W02 HSPiter De AzizNo ratings yet
- FA0996 - (2021.08.02) Mini PackDocument33 pagesFA0996 - (2021.08.02) Mini PackOratexaNo ratings yet
- Do3000x Oim enDocument49 pagesDo3000x Oim enAlexNo ratings yet
- G110M G120D G120P G120C ET200pro 4.7SP10 Prod Info 0418 en-USDocument6 pagesG110M G120D G120P G120C ET200pro 4.7SP10 Prod Info 0418 en-USFelipe Polix BarbosaNo ratings yet
- Akai AX-60 Service ManualDocument45 pagesAkai AX-60 Service ManualGiannino BertoliNo ratings yet
- TC-42PX34X: 42 Inch Class 720p Plasma HDTVDocument7 pagesTC-42PX34X: 42 Inch Class 720p Plasma HDTVPedro SandovalNo ratings yet
- A320 Computer ResetDocument19 pagesA320 Computer ResetIndika WidyaratneNo ratings yet
- 2 LVO 330 LAT 0+0+1+0+0 ALL Rev00Document14 pages2 LVO 330 LAT 0+0+1+0+0 ALL Rev00Alireza RastiNo ratings yet
- Ei 734-031-0029R01 PDFDocument14 pagesEi 734-031-0029R01 PDFOscar RochaNo ratings yet
- Technical Manual SIMPLY HP - ING - Sez.5 - AppendixDocument6 pagesTechnical Manual SIMPLY HP - ING - Sez.5 - AppendixfortroniNo ratings yet
- Ajuste Modulo - 040708-2 - GB PDFDocument10 pagesAjuste Modulo - 040708-2 - GB PDFAldo VegaNo ratings yet
- NTB02 082aDocument2 pagesNTB02 082aPMNo ratings yet
- PVT831-E-10-34-Instrument and Alarm Point List (090116) - WorkingDocument34 pagesPVT831-E-10-34-Instrument and Alarm Point List (090116) - WorkingBui Duy ThanhNo ratings yet
- Tabla Anclada - ToyotaDocument92 pagesTabla Anclada - ToyotaEduardoNo ratings yet
- Esquma Eléctrico SencilloDocument2 pagesEsquma Eléctrico SencilloJorge100% (3)
- NTB07 042aDocument2 pagesNTB07 042asuperkid667100% (1)
- W 0700m6 - Gas Mixer PDFDocument5 pagesW 0700m6 - Gas Mixer PDFPopa MihaiNo ratings yet
- ZF Wg110 Transmission Fault CodesDocument25 pagesZF Wg110 Transmission Fault Codesnamduong368100% (9)
- Rotork E650EDocument4 pagesRotork E650ENAYEEMNo ratings yet
- Otis TCB SVTDocument35 pagesOtis TCB SVTRefaat Raslan ShaabanNo ratings yet
- UNISAB II Spare Parts and Part Numbers PDFDocument2 pagesUNISAB II Spare Parts and Part Numbers PDFmahmoud487150% (2)
- AuxiliariesDocument14 pagesAuxiliariesKeadilan Harus Ditegakkan100% (3)
- Felcom-70 Nmarsat-F Mobile Earth Station Sme 56340b 2 307Document307 pagesFelcom-70 Nmarsat-F Mobile Earth Station Sme 56340b 2 307gitlatsubNo ratings yet
- 2J0-008 Error F050Document3 pages2J0-008 Error F050Radenko RasevicNo ratings yet
- DPD002861 Ang-1Document9 pagesDPD002861 Ang-1edward polankoolNo ratings yet
- Guide Lines: Field Component ManualDocument21 pagesGuide Lines: Field Component ManualOsman ElmaradnyNo ratings yet
- PY Installation ManualDocument35 pagesPY Installation Manualksa_hishamNo ratings yet
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsRating: 5 out of 5 stars5/5 (1)
- High Efficiency RF and Microwave Solid State Power AmplifiersFrom EverandHigh Efficiency RF and Microwave Solid State Power AmplifiersRating: 1 out of 5 stars1/5 (1)
- GL RCB OtisDocument24 pagesGL RCB OtisNour BenNo ratings yet
- 4.1.10 LiftMedia User Manual.V170.enDocument20 pages4.1.10 LiftMedia User Manual.V170.enNour BenNo ratings yet
- Mlks10haricipanoDocument3 pagesMlks10haricipanoNour BenNo ratings yet
- Dipswitch Settings ArcodeDocument2 pagesDipswitch Settings ArcodeNour BenNo ratings yet
- ARL-300 User Manual.V251.en-1ffDocument33 pagesARL-300 User Manual.V251.en-1ffNour Ben100% (1)
- User Manual. Automatic Horizontal Sliding Car Door. Component: VF7 Electronic Module. V7.01.02Document28 pagesUser Manual. Automatic Horizontal Sliding Car Door. Component: VF7 Electronic Module. V7.01.02Nour BenNo ratings yet
- Fr-Sw1-Setup-We: Transistorized Inverter Instruction ManualDocument57 pagesFr-Sw1-Setup-We: Transistorized Inverter Instruction ManualNour BenNo ratings yet
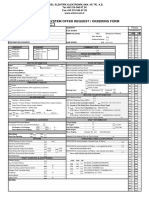
- Arcode Control System Offer Request / Ordering Form:::: VAC (Phase To Phase) A BDocument2 pagesArcode Control System Offer Request / Ordering Form:::: VAC (Phase To Phase) A BNour BenNo ratings yet
- Sy/Max PLC Upgrade Kit: Easy, Inexpensive and CompleteDocument2 pagesSy/Max PLC Upgrade Kit: Easy, Inexpensive and CompleteNour BenNo ratings yet
- Arcode Control System Offer Request / Ordering Form:::: VAC (Phase To Phase) A BDocument2 pagesArcode Control System Offer Request / Ordering Form:::: VAC (Phase To Phase) A BNour BenNo ratings yet
- Servest Training CatalogueDocument62 pagesServest Training Catalogueayandamakabongwe06No ratings yet
- Rule 1Document7 pagesRule 1margiant76100% (1)
- Advanced Drilling Engineering Final TOCDocument10 pagesAdvanced Drilling Engineering Final TOCbrayanconin0% (1)
- Mathematical Thinking Skills of BSED-Math Students: Its Relationship To Study Habits and Utilization of SchoologyDocument18 pagesMathematical Thinking Skills of BSED-Math Students: Its Relationship To Study Habits and Utilization of SchoologyPsychology and Education: A Multidisciplinary JournalNo ratings yet
- Introduction and Scope of The StudyDocument6 pagesIntroduction and Scope of The StudyTeeJyyNo ratings yet
- Donau CarbonDocument2 pagesDonau CarbonLim Chee SiangNo ratings yet
- Mesopotamia Means "Land Between The Rivers" in Greek, Referring To The Region Between The Tigris and Euphrates Rivers in Present-Day IraqDocument11 pagesMesopotamia Means "Land Between The Rivers" in Greek, Referring To The Region Between The Tigris and Euphrates Rivers in Present-Day IraqYvette NacionNo ratings yet
- Fluoridation - UMngeni WaterDocument22 pagesFluoridation - UMngeni WaternobulartNo ratings yet
- Narasimha StutiDocument21 pagesNarasimha StutiezioNo ratings yet
- Fig. 4. X-Ray Diffraction Pattern of Bio-SynthesizedDocument3 pagesFig. 4. X-Ray Diffraction Pattern of Bio-SynthesizedAfrah MNo ratings yet
- Introduction To Social Media Awareness 1Document5 pagesIntroduction To Social Media Awareness 1Dhruv SinghNo ratings yet
- Pilippine Short StoriesDocument75 pagesPilippine Short StoriesRaymond Bill Bela-o Patacsil50% (2)
- Job Circular For The Post of Manager, AE and SAEDocument2 pagesJob Circular For The Post of Manager, AE and SAEXYZNo ratings yet
- Emerson Complete, VOL 10 Lectures and Biographical Sketches - Ralph Waldo Emerson (1883)Document396 pagesEmerson Complete, VOL 10 Lectures and Biographical Sketches - Ralph Waldo Emerson (1883)WaterwindNo ratings yet
- (Milan Zeleny) Human Systems Management IntegratiDocument484 pages(Milan Zeleny) Human Systems Management IntegratiakselNo ratings yet
- SAIL Challenges of Single Cell and Spatial ExperimentsDocument54 pagesSAIL Challenges of Single Cell and Spatial ExperimentsespartawithespartilhoNo ratings yet
- Es - Chatta Bakhtawar-Shaheen ColonyDocument3 pagesEs - Chatta Bakhtawar-Shaheen ColonyNida NazNo ratings yet
- Chapter 1Document10 pagesChapter 1Pranjal jainNo ratings yet
- Phil Hine en PermutationsDocument41 pagesPhil Hine en Permutationsgunter unserNo ratings yet
- Flame Emission Photometers - Analytical Instrumentation Questions and Answers - SanfoundryDocument6 pagesFlame Emission Photometers - Analytical Instrumentation Questions and Answers - SanfoundryFaisal Shahzad100% (1)
- Investor Day Rhodia Polyamide Presentation June 2005 enDocument27 pagesInvestor Day Rhodia Polyamide Presentation June 2005 enaboaalaaNo ratings yet
- Curvilinear Motion and Polar CoordinatesDocument6 pagesCurvilinear Motion and Polar CoordinatesKhairul YahyahNo ratings yet
- 170706160718tokyo Cement Company (Lanka) PLC Annual Report 2016-17Document140 pages170706160718tokyo Cement Company (Lanka) PLC Annual Report 2016-17Audithya KahawattaNo ratings yet
- 25 191 1 PB PDFDocument11 pages25 191 1 PB PDFRaihatil UmmiNo ratings yet
- DR Herry Setya Yudha Utama Spb. Finacs. Mhkes. Ics - Breast Cancer at AglanceDocument17 pagesDR Herry Setya Yudha Utama Spb. Finacs. Mhkes. Ics - Breast Cancer at AglanceKarina UtariNo ratings yet