Download as pdf or txt
You might also like
- Atlas of Human Anatomy On MRIDocument140 pagesAtlas of Human Anatomy On MRIYanti Sihombing100% (4)
- Production Engineering: Jig and Tool DesignFrom EverandProduction Engineering: Jig and Tool DesignRating: 4 out of 5 stars4/5 (9)
- DJJ 10033-Chapter 5.GEARDocument34 pagesDJJ 10033-Chapter 5.GEARStepianus JtNo ratings yet
- Gears and Gear Drives!!Document55 pagesGears and Gear Drives!!Ishank Singh SandhuNo ratings yet
- Gear CouplingDocument4 pagesGear Couplingmartín_suárez_11No ratings yet
- Design II MDE 221 Mott CH 8 and CH 9 Spur GearsDocument42 pagesDesign II MDE 221 Mott CH 8 and CH 9 Spur GearsThieroy PelendaNo ratings yet
- Ib Physics ch12 PDFDocument2 pagesIb Physics ch12 PDFHansal Pravin KachharaNo ratings yet
- Optimal Gear Design For Medical Applications: Alexander L. Kapelevich Akgears, LLC, Thomas M. Mcnamara Thermotech CoDocument7 pagesOptimal Gear Design For Medical Applications: Alexander L. Kapelevich Akgears, LLC, Thomas M. Mcnamara Thermotech CoAvinash KumarNo ratings yet
- CH08 2Document52 pagesCH08 2abdallah ghannamNo ratings yet
- Part SolutionDocument5 pagesPart SolutionCherrydhelNo ratings yet
- Lecture 2 5 JanDocument35 pagesLecture 2 5 JanSaurabh KNo ratings yet
- DJJ 10033-Chapter 5Document45 pagesDJJ 10033-Chapter 5Abbas SeuNo ratings yet
- 2 Gear BasicsDocument6 pages2 Gear BasicsMohamed Adel RizkNo ratings yet
- Chap-6 Gears 1Document30 pagesChap-6 Gears 1AlysNo ratings yet
- Gears NBH FinalDocument75 pagesGears NBH FinalSaikat Bhowmick100% (1)
- Unit-4 Bevel GearsDocument27 pagesUnit-4 Bevel GearsMarthande50% (2)
- Lab Report 5Document11 pagesLab Report 5Areeba MujtabaNo ratings yet
- Gear Design NhpancholiDocument66 pagesGear Design NhpancholiDINESH KUMARNo ratings yet
- Gears, Splines, and Serrations: Unit 24Document8 pagesGears, Splines, and Serrations: Unit 24Satish Dhandole100% (1)
- Hypoid Gears With Involute Teeth: David B. DoonerDocument6 pagesHypoid Gears With Involute Teeth: David B. DoonerLibardo Cardenas PNo ratings yet
- 2 - 3 Involute Spur Gear 1Document13 pages2 - 3 Involute Spur Gear 1jiteshpaul100% (1)
- 4SPURDocument12 pages4SPURNeil RubsNo ratings yet
- Design of Machine Elements-II: Lecture By: - Engr Aakash Munsif Mechanical Engineering DepartmentDocument37 pagesDesign of Machine Elements-II: Lecture By: - Engr Aakash Munsif Mechanical Engineering DepartmentMuhammad Mubashar FareedNo ratings yet
- Group 3 (Gears)Document52 pagesGroup 3 (Gears)CherrydhelNo ratings yet
- Gears - General: Shigley's Mechanical Engineering DesignDocument229 pagesGears - General: Shigley's Mechanical Engineering DesignbasitNo ratings yet
- BacklashDocument29 pagesBacklashAnurag SarkarNo ratings yet
- Mom 15Document64 pagesMom 15Najwan AzitNo ratings yet
- ProjectDocument6 pagesProjectchandraprakash koraviNo ratings yet
- Chapter 05Document15 pagesChapter 05Muhammad Nur IkhwanNo ratings yet
- Design of Spur Gear - Fundamentals - 1Document19 pagesDesign of Spur Gear - Fundamentals - 1Dhyan PatelNo ratings yet
- MEC 410 Chapter 8 Spring 2017Document68 pagesMEC 410 Chapter 8 Spring 2017Frederick KooNo ratings yet
- 05 Spur Gear ProblemsDocument51 pages05 Spur Gear ProblemsRAMESH KUMAR ANo ratings yet
- Chapter 9 - Sections 9.1-9.5Document26 pagesChapter 9 - Sections 9.1-9.5hanihamoud05No ratings yet
- 7 Gears: 7.1 Gear ClassificationDocument15 pages7 Gears: 7.1 Gear ClassificationSimrit Kaur MakanNo ratings yet
- DME AllDocument36 pagesDME AllBashu Dev SanjelNo ratings yet
- Direct Gear DesignDocument7 pagesDirect Gear DesignFranco Angelo RegenciaNo ratings yet
- Note On Gear BoxDocument32 pagesNote On Gear BoxanupbagNo ratings yet
- Gang ADocument46 pagesGang Aganga6013No ratings yet
- KDM UNIT-2 Gears - Gear TrainsDocument11 pagesKDM UNIT-2 Gears - Gear TrainsAchyuth KrishnaNo ratings yet
- GearsDocument51 pagesGearsKasi Visweswar Rao100% (1)
- Gear DesignDocument10 pagesGear DesignDragoș Gabriel Hrihor100% (2)
- IS3756 1ed 2002 Method For Gear Correction - Addendum Modification For External Cylindrical Gears With Parallel AxesDocument14 pagesIS3756 1ed 2002 Method For Gear Correction - Addendum Modification For External Cylindrical Gears With Parallel AxesevangalionNo ratings yet
- Gear and Gear TrainDocument21 pagesGear and Gear Trainm_er100No ratings yet
- Gear Measurements:-Mechanical Measurements and MetrologyDocument4 pagesGear Measurements:-Mechanical Measurements and Metrologykathir drayNo ratings yet
- IV 4Document16 pagesIV 423mp33No ratings yet
- Cad Lab Report 5Document11 pagesCad Lab Report 5Areeba MujtabaNo ratings yet
- Spur Gears Are The Most Common Type of GearsDocument9 pagesSpur Gears Are The Most Common Type of GearsEngineering ProjectNo ratings yet
- Design of GearsDocument57 pagesDesign of Gearsraj sopariaNo ratings yet
- Unit 6 - Design of GearsDocument22 pagesUnit 6 - Design of GearsKunal AhiwaleNo ratings yet
- Elements of Mechanical Design: SYEN4399. FIRST in EngineeringDocument27 pagesElements of Mechanical Design: SYEN4399. FIRST in EngineeringYash GandhiNo ratings yet
- Bao Fanbiao, Zeng Lianghua, Huang Baoshan: The Design of Transmission Gear Based On The Dynamic PropertyDocument4 pagesBao Fanbiao, Zeng Lianghua, Huang Baoshan: The Design of Transmission Gear Based On The Dynamic PropertyAshwanth MichealNo ratings yet
- Transmission System of Gear BoxDocument86 pagesTransmission System of Gear BoxAmit Kumar Uke100% (4)
- Construction and Details of Gears: TopicDocument26 pagesConstruction and Details of Gears: TopicAbhishek HoreNo ratings yet
- ME324 Lecture5Document66 pagesME324 Lecture5Jam Maica TuboNo ratings yet
- Norton Abrasive Solutions-Gear IndustryDocument36 pagesNorton Abrasive Solutions-Gear IndustryJItesh PAtilNo ratings yet
- Mechanical Measurements and MetrologyDocument28 pagesMechanical Measurements and MetrologySandeep OholNo ratings yet
- Kinematics of GearsDocument19 pagesKinematics of Gearsapi-3774614No ratings yet
- 04-Gears and Gear TrainsDocument56 pages04-Gears and Gear TrainsYousef AmrNo ratings yet
- Gear Measurement and TestingDocument52 pagesGear Measurement and TestingHemanth Kumar MadhuNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- Traditional Toolmaking: The Classic Treatise on Lapping, Threading, Precision Measurements, and General ToolmakingFrom EverandTraditional Toolmaking: The Classic Treatise on Lapping, Threading, Precision Measurements, and General ToolmakingRating: 5 out of 5 stars5/5 (2)
- Sensors 22 03148Document11 pagesSensors 22 03148rajesh yadavNo ratings yet
- Datasheet FLC-100 RussianDocument2 pagesDatasheet FLC-100 Russianro7ewadNo ratings yet
- Science 4 Quarter 3 Module 6 LightDocument14 pagesScience 4 Quarter 3 Module 6 LightFrit Zie75% (4)
- Teknik Saluran TransmisiDocument28 pagesTeknik Saluran TransmisiDani RamdaniNo ratings yet
- EasyLogic DM1000 DM3000 Series METSEDM1110Document3 pagesEasyLogic DM1000 DM3000 Series METSEDM1110Electrical DistributionNo ratings yet
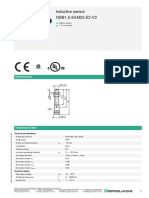
- Inductive Sensor NBB1,5-5GM25-E2-V3: DimensionsDocument3 pagesInductive Sensor NBB1,5-5GM25-E2-V3: DimensionsKenanNo ratings yet
- Cambridge International Advanced Subsidiary and Advanced LevelDocument20 pagesCambridge International Advanced Subsidiary and Advanced LevelFarogh HamidNo ratings yet
- NEE 510-ElevatorDocument15 pagesNEE 510-ElevatorCeejay IndayaNo ratings yet
- Kuliah 3 Transmission Line Theory Lumped CircuitDocument45 pagesKuliah 3 Transmission Line Theory Lumped CircuitMuhammad Fikri Hidayat FikriNo ratings yet
- AS NotesDocument222 pagesAS NotesRayyan HashmiNo ratings yet
- Remote Neural MonitoringDocument6 pagesRemote Neural MonitoringGeneration GenerationNo ratings yet
- Antenna Design For Iot in Urban PDFDocument60 pagesAntenna Design For Iot in Urban PDFMO JamalNo ratings yet
- Physics: PCCP DivisionDocument98 pagesPhysics: PCCP DivisionAyushNo ratings yet
- Transformers - Ideal and Non-IdealDocument2 pagesTransformers - Ideal and Non-IdealAdriel BayNo ratings yet
- Measurements of Magnetic Flux Density in Rotating Machines: Development of A Calibrated and Portable Measurement SystemDocument85 pagesMeasurements of Magnetic Flux Density in Rotating Machines: Development of A Calibrated and Portable Measurement SystemRameez Ali FaridiNo ratings yet
- Scheme of Studies For Spring Semester 2020 PDFDocument28 pagesScheme of Studies For Spring Semester 2020 PDFAbdul WahabNo ratings yet
- What We Learn About Battery Materials From Their Magnetic PropertiesDocument11 pagesWhat We Learn About Battery Materials From Their Magnetic PropertiesKiki Rezki LestariNo ratings yet
- Nema MG1Document670 pagesNema MG1Juan Abdón Sepúlveda Garrido100% (2)
- List Price: W.E.F. 12th January, 2021Document11 pagesList Price: W.E.F. 12th January, 2021usama zedanNo ratings yet
- E Line Kam Kap BusbarDocument23 pagesE Line Kam Kap BusbarAyoub NgadiNo ratings yet
- OVB-VBF FlierDocument2 pagesOVB-VBF FlierTetianaNo ratings yet
- Electrical System of The BodyDocument11 pagesElectrical System of The BodyPyay Lin ThantNo ratings yet
- Ss40F, Ss40Af: Bipolar Hall-Effect Digital Position Sensor IcsDocument6 pagesSs40F, Ss40Af: Bipolar Hall-Effect Digital Position Sensor IcsNaur AvilaNo ratings yet
- Design and Fabrication of Single Cylinder Solenoid EngineDocument7 pagesDesign and Fabrication of Single Cylinder Solenoid EngineVIVA-TECH IJRINo ratings yet
- NoDocument8 pagesNodennis emNo ratings yet
- TES-P-119-41-R0-Non-Linear Resistor Application in GISDocument16 pagesTES-P-119-41-R0-Non-Linear Resistor Application in GISZain-Ul- AbdeenNo ratings yet
- Optical Communication - QBDocument3 pagesOptical Communication - QBBhuvaneswari BalachanderNo ratings yet