
Logistic Regression Notes
Logistic Regression Notes
You might also like
- HR Manager RACI MAtrixDocument2 pagesHR Manager RACI MAtrixDigendra Rathore50% (2)
- 60 Seconds Binary Options StrategyDocument11 pages60 Seconds Binary Options Strategybookdotcom722175% (8)
- Logistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"Document25 pagesLogistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"demircizehra522No ratings yet
- Logistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"Document21 pagesLogistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"KumarItžMëNo ratings yet
- Logistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"Document21 pagesLogistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"Yesmine MakkesNo ratings yet
- Ed3book - Jan72023 87 110Document24 pagesEd3book - Jan72023 87 110Fran Guzmán MartosNo ratings yet
- Ias and Airness: Train/Test MismatchDocument12 pagesIas and Airness: Train/Test MismatchJiahong HeNo ratings yet
- Deep Learning AnswersDocument36 pagesDeep Learning AnswersmrunalNo ratings yet
- Qualification Exam Question: 1 Statistical Models and MethodsDocument4 pagesQualification Exam Question: 1 Statistical Models and MethodsAlmaliequeNo ratings yet
- MIT - Machine Learning Notes From Chapter 1 - 14 PDFDocument101 pagesMIT - Machine Learning Notes From Chapter 1 - 14 PDFSuleiman GargaareNo ratings yet
- This Story Paraphrased From A Post On 9/4/12Document7 pagesThis Story Paraphrased From A Post On 9/4/12Parias L. MukebaNo ratings yet
- Day 2Document40 pagesDay 2Dishant GuptaNo ratings yet
- 2-Machine Learning AlgorithmsDocument16 pages2-Machine Learning AlgorithmsMohamedi Ally UssiNo ratings yet
- Different Paradigms of Pattern RecognitionDocument8 pagesDifferent Paradigms of Pattern RecognitionAnkur KumarNo ratings yet
- Naive Bayes and Sentiment ClassificationDocument23 pagesNaive Bayes and Sentiment ClassificationPHONG NGUYỄN THANHNo ratings yet
- Machine Learning ModelsDocument16 pagesMachine Learning ModelsShivam ChadhaNo ratings yet
- Naive Bayes Sentiment AnalysisDocument23 pagesNaive Bayes Sentiment AnalysisTuan Anh TranNo ratings yet
- Naive Bayes and Sentiment ClassificationDocument23 pagesNaive Bayes and Sentiment ClassificationAndrei CovaciNo ratings yet
- Na Ive Bayes ClassifierDocument3 pagesNa Ive Bayes ClassifierWill CorleoneNo ratings yet
- Naive Bayes and Sentiment ClassificationDocument23 pagesNaive Bayes and Sentiment ClassificationSirbu VivianaNo ratings yet
- Bayesian Classification Theory: Robin Hanson John Stutz Peter CheesemanDocument10 pagesBayesian Classification Theory: Robin Hanson John Stutz Peter CheesemanghiutaNo ratings yet
- Binary classification.docxDocument2 pagesBinary classification.docxashwini bhosaleNo ratings yet
- A Literature Survey On Domain Adaptation of Statistical ClassifiersDocument12 pagesA Literature Survey On Domain Adaptation of Statistical ClassifiersMatej ParadžikNo ratings yet
- Lec 23Document20 pagesLec 23Abcdefgh EfghabcdNo ratings yet
- Unit-Ii Chapter-3 Beyond Binary Classification Handling More Than Two ClassesDocument16 pagesUnit-Ii Chapter-3 Beyond Binary Classification Handling More Than Two Classesproducts infoNo ratings yet
- MISY 631 Final Review Calculators Will Be Provided For The ExamDocument9 pagesMISY 631 Final Review Calculators Will Be Provided For The ExamAniKelbakianiNo ratings yet
- Unit-1 MLDocument19 pagesUnit-1 MLraviNo ratings yet
- Lecture 2: Basics and Definitions: Networks As Data ModelsDocument28 pagesLecture 2: Basics and Definitions: Networks As Data ModelsshardapatelNo ratings yet
- Denoising Autoencoders tr1316Document16 pagesDenoising Autoencoders tr1316penetsNo ratings yet
- 6 Beyond Binary ClassificationDocument14 pages6 Beyond Binary ClassificationJiahong HeNo ratings yet
- Log-Linear Models and Conditional Random FieldselsDocument27 pagesLog-Linear Models and Conditional Random Fieldselssd1802No ratings yet
- Machine Learning: The Hundred-Page BookDocument9 pagesMachine Learning: The Hundred-Page BookRahulNo ratings yet
- The Hundred Page Machine Learning BookDocument155 pagesThe Hundred Page Machine Learning Bookash12p88No ratings yet
- Logisticregression 2021Document78 pagesLogisticregression 2021Perike Chandra SekharNo ratings yet
- Machine Learning and Pattern Recognition Week 3 Intro - ClassificationDocument5 pagesMachine Learning and Pattern Recognition Week 3 Intro - ClassificationzeliawillscumbergNo ratings yet
- Models of Fraud Detection and Analysis of Payment Transactions Using Machine LearningDocument16 pagesModels of Fraud Detection and Analysis of Payment Transactions Using Machine LearningRockyRambo1No ratings yet
- Machine Learning: Emmanuel Okafor, PH.D., M.SC., B.EngDocument13 pagesMachine Learning: Emmanuel Okafor, PH.D., M.SC., B.EngAbubakarNo ratings yet
- Assignment 3 Part 1 and 4Document3 pagesAssignment 3 Part 1 and 4iquanquan10No ratings yet
- Lab7&8 NaiveBayesDocument5 pagesLab7&8 NaiveBayestin nguyenNo ratings yet
- Ambo University Inistitute of Technology Department of Computer ScienceDocument13 pagesAmbo University Inistitute of Technology Department of Computer Sciencesifan MirkenaNo ratings yet
- ML - Questions & AnswerDocument45 pagesML - Questions & Answermanta8057No ratings yet
- Naive Bayesian Classifier: National Institute of Technology SikkimDocument6 pagesNaive Bayesian Classifier: National Institute of Technology Sikkimankit sauravNo ratings yet
- Broadly, There Are 3 Types of Machine Learning Algorithms.Document33 pagesBroadly, There Are 3 Types of Machine Learning Algorithms.hbk.hariharanNo ratings yet
- Pattern Recognition: Lasse Holmstr Om and Petri KoistinenDocument10 pagesPattern Recognition: Lasse Holmstr Om and Petri KoistinenTalzzoft ElectrNo ratings yet
- CH 12Document37 pagesCH 12yashwanthr3No ratings yet
- hw1 f21112 Problems11Document2 pageshw1 f21112 Problems11happy_userNo ratings yet
- ML MergeDocument145 pagesML Mergemariel StolinNo ratings yet
- Multiclass Classification: 9.520 Class 06, 25 Feb 2008 Ryan RifkinDocument59 pagesMulticlass Classification: 9.520 Class 06, 25 Feb 2008 Ryan Rifkingheorghe garduNo ratings yet
- Multiclass Classification: 9.520 Class 06, 25 Feb 2008 Ryan RifkinDocument59 pagesMulticlass Classification: 9.520 Class 06, 25 Feb 2008 Ryan RifkinSarfaraz AhmadNo ratings yet
- Clustering ExamplesDocument47 pagesClustering Examplesdawit gebreyohansNo ratings yet
- Introduction. Binary Classification and Bayes Optimal ClassifierDocument7 pagesIntroduction. Binary Classification and Bayes Optimal ClassifierYiwei ChenNo ratings yet
- Machine LearningDocument6 pagesMachine LearningSushmita MhamaneNo ratings yet
- Lecture 10 Ensemble MethodsDocument69 pagesLecture 10 Ensemble MethodsLIU HengxuNo ratings yet
- Deep Learning As A Building Block in Probabilistic Models: Pierre-Alexandre MatteiDocument62 pagesDeep Learning As A Building Block in Probabilistic Models: Pierre-Alexandre Matteimartin.durand955No ratings yet
- Machine Learning - Lazy Learning: HapterDocument22 pagesMachine Learning - Lazy Learning: HapterSarah HajaratNo ratings yet
- Commonly Used Machine Learning AlgorithmsDocument27 pagesCommonly Used Machine Learning Algorithmssbs Analytics19-21No ratings yet
- Support Vector Machines: Trends & ControversiesDocument11 pagesSupport Vector Machines: Trends & ControversiesEZ112No ratings yet
- Fair SVMDocument10 pagesFair SVMMahbod (Matt) OLFATNo ratings yet
- Fuzzy Systems TheoryDocument32 pagesFuzzy Systems TheoryBMSNo ratings yet
- ML Terminologies PDFDocument44 pagesML Terminologies PDFKapildev KumarNo ratings yet
- An Experimental Study of Learning Curves For Statistical Pattern ClassifiersDocument4 pagesAn Experimental Study of Learning Curves For Statistical Pattern ClassifiersAnabel GarcíaNo ratings yet
- Logisticpp 2Document2 pagesLogisticpp 2SHRAVANI VISSAMSETTINo ratings yet
- LogisticppDocument4 pagesLogisticppSHRAVANI VISSAMSETTINo ratings yet
- Logistic RegressionDocument25 pagesLogistic RegressionSHRAVANI VISSAMSETTINo ratings yet
- Gyanoday Internship-Guidelines GRID-InDIA InternalDocument11 pagesGyanoday Internship-Guidelines GRID-InDIA InternalSHRAVANI VISSAMSETTINo ratings yet
- Video Title: From Problem Definition To Decision MakingDocument3 pagesVideo Title: From Problem Definition To Decision MakingArun SharmaNo ratings yet
- Automotive Supply Chain Standards: Comply or Die: Mmog/LeDocument4 pagesAutomotive Supply Chain Standards: Comply or Die: Mmog/LeImma NeNo ratings yet
- 2016 Endsem AnsDocument6 pages2016 Endsem AnsSingh ChitNo ratings yet
- 9 Grammar, Vocabulary, and Pronunciation ADocument6 pages9 Grammar, Vocabulary, and Pronunciation ANorbert VonnákNo ratings yet
- 05 CSA RegistersDocument51 pages05 CSA RegistersHengCYNo ratings yet
- Thingworx Training Brochure (12-04-2021)Document2 pagesThingworx Training Brochure (12-04-2021)Shaik Mahaboob BashaNo ratings yet
- Computer Assembly: Department of Computer Science, RUPPDocument28 pagesComputer Assembly: Department of Computer Science, RUPPOudom 22No ratings yet
- SAP S/4HANA Conversion and SAP System Upgrade Sample QuestionsDocument4 pagesSAP S/4HANA Conversion and SAP System Upgrade Sample QuestionsTushar WadzNo ratings yet
- Prototypes of CSI-based Induction Heating UnitsDocument12 pagesPrototypes of CSI-based Induction Heating UnitsdaudiNo ratings yet
- Libble-Eu Med8erer800Document46 pagesLibble-Eu Med8erer800Mae WestNo ratings yet
- Design and Simulation of A Rooftop Solar PV System Using PVsyst SoftwareDocument5 pagesDesign and Simulation of A Rooftop Solar PV System Using PVsyst Softwarefatemeh mohammadiNo ratings yet
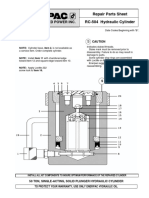
- Manuel de Partes y Reparacion Cilindro RC 504Document2 pagesManuel de Partes y Reparacion Cilindro RC 504Mauricio Hermosilla OrellanaNo ratings yet
- The Gate Shall Be Operated by Rope Drum Hoist: Key PlanDocument1 pageThe Gate Shall Be Operated by Rope Drum Hoist: Key Planbalwant_negi7520No ratings yet
- ESQUEMA Ms-7529 (g31m3-v2) REV 1.1Document33 pagesESQUEMA Ms-7529 (g31m3-v2) REV 1.1RisoSilvaNo ratings yet
- Fibonacci Search: Observation On Unimodal FunctionsDocument5 pagesFibonacci Search: Observation On Unimodal FunctionsaleemsalmanNo ratings yet
- Chapter3 - Basic Processing UnitDocument47 pagesChapter3 - Basic Processing UnitPraveen AlapatiNo ratings yet
- AZ-104-MicrosoftAzureAdministrator LAB 02a Manage Subscriptions and RBACDocument7 pagesAZ-104-MicrosoftAzureAdministrator LAB 02a Manage Subscriptions and RBACgvroctaNo ratings yet
- I-Vu Building Automation System: Carrier® Chillervu™ - Psm-IoDocument2 pagesI-Vu Building Automation System: Carrier® Chillervu™ - Psm-IoOctavio Farid Rossi YumhaNo ratings yet
- Akash Soni Resume-1Document2 pagesAkash Soni Resume-1Bijender KaushikNo ratings yet
- BssDocument3 pagesBssaaaNo ratings yet
- Bitsler Double BTC ScriptDocument4 pagesBitsler Double BTC ScriptBİTCOİN SCRİPTNo ratings yet
- GV Series 4 Boiler ManualDocument96 pagesGV Series 4 Boiler ManualBruce GrantNo ratings yet
- Schedule Comments AttachmentDocument4 pagesSchedule Comments Attachmenthz135874100% (1)
- MR1751 - Pooja M - 1cr19mba62Document55 pagesMR1751 - Pooja M - 1cr19mba62Bryan JebulNo ratings yet
- JSS 1 Computer Studies 2nd Term ExamDocument4 pagesJSS 1 Computer Studies 2nd Term ExamGabbs Ade100% (4)
- Global Work in A Rapidly Changing World: Implications For MNEs and IndividualsDocument14 pagesGlobal Work in A Rapidly Changing World: Implications For MNEs and IndividualsKhondoker AliNo ratings yet
- JMA-7100 Series ARPA RadarDocument8 pagesJMA-7100 Series ARPA RadarNguyen Phuoc HoNo ratings yet
- Students - AI Track CS Master SaclayDocument50 pagesStudents - AI Track CS Master SaclayHoàngHenryNo ratings yet




























































































Download as pdf or txt
You might also like
- HR Manager RACI MAtrixDocument2 pagesHR Manager RACI MAtrixDigendra Rathore50% (2)
- 60 Seconds Binary Options StrategyDocument11 pages60 Seconds Binary Options Strategybookdotcom722175% (8)
- Logistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"Document25 pagesLogistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"demircizehra522No ratings yet
- Logistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"Document21 pagesLogistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"KumarItžMëNo ratings yet
- Logistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"Document21 pagesLogistic Regression: "And How Do You Know That These Fine Begonias Are Not of Equal Importance?"Yesmine MakkesNo ratings yet
- Ed3book - Jan72023 87 110Document24 pagesEd3book - Jan72023 87 110Fran Guzmán MartosNo ratings yet
- Ias and Airness: Train/Test MismatchDocument12 pagesIas and Airness: Train/Test MismatchJiahong HeNo ratings yet
- Deep Learning AnswersDocument36 pagesDeep Learning AnswersmrunalNo ratings yet
- Qualification Exam Question: 1 Statistical Models and MethodsDocument4 pagesQualification Exam Question: 1 Statistical Models and MethodsAlmaliequeNo ratings yet
- MIT - Machine Learning Notes From Chapter 1 - 14 PDFDocument101 pagesMIT - Machine Learning Notes From Chapter 1 - 14 PDFSuleiman GargaareNo ratings yet
- This Story Paraphrased From A Post On 9/4/12Document7 pagesThis Story Paraphrased From A Post On 9/4/12Parias L. MukebaNo ratings yet
- Day 2Document40 pagesDay 2Dishant GuptaNo ratings yet
- 2-Machine Learning AlgorithmsDocument16 pages2-Machine Learning AlgorithmsMohamedi Ally UssiNo ratings yet
- Different Paradigms of Pattern RecognitionDocument8 pagesDifferent Paradigms of Pattern RecognitionAnkur KumarNo ratings yet
- Naive Bayes and Sentiment ClassificationDocument23 pagesNaive Bayes and Sentiment ClassificationPHONG NGUYỄN THANHNo ratings yet
- Machine Learning ModelsDocument16 pagesMachine Learning ModelsShivam ChadhaNo ratings yet
- Naive Bayes Sentiment AnalysisDocument23 pagesNaive Bayes Sentiment AnalysisTuan Anh TranNo ratings yet
- Naive Bayes and Sentiment ClassificationDocument23 pagesNaive Bayes and Sentiment ClassificationAndrei CovaciNo ratings yet
- Na Ive Bayes ClassifierDocument3 pagesNa Ive Bayes ClassifierWill CorleoneNo ratings yet
- Naive Bayes and Sentiment ClassificationDocument23 pagesNaive Bayes and Sentiment ClassificationSirbu VivianaNo ratings yet
- Bayesian Classification Theory: Robin Hanson John Stutz Peter CheesemanDocument10 pagesBayesian Classification Theory: Robin Hanson John Stutz Peter CheesemanghiutaNo ratings yet
- Binary classification.docxDocument2 pagesBinary classification.docxashwini bhosaleNo ratings yet
- A Literature Survey On Domain Adaptation of Statistical ClassifiersDocument12 pagesA Literature Survey On Domain Adaptation of Statistical ClassifiersMatej ParadžikNo ratings yet
- Lec 23Document20 pagesLec 23Abcdefgh EfghabcdNo ratings yet
- Unit-Ii Chapter-3 Beyond Binary Classification Handling More Than Two ClassesDocument16 pagesUnit-Ii Chapter-3 Beyond Binary Classification Handling More Than Two Classesproducts infoNo ratings yet
- MISY 631 Final Review Calculators Will Be Provided For The ExamDocument9 pagesMISY 631 Final Review Calculators Will Be Provided For The ExamAniKelbakianiNo ratings yet
- Unit-1 MLDocument19 pagesUnit-1 MLraviNo ratings yet
- Lecture 2: Basics and Definitions: Networks As Data ModelsDocument28 pagesLecture 2: Basics and Definitions: Networks As Data ModelsshardapatelNo ratings yet
- Denoising Autoencoders tr1316Document16 pagesDenoising Autoencoders tr1316penetsNo ratings yet
- 6 Beyond Binary ClassificationDocument14 pages6 Beyond Binary ClassificationJiahong HeNo ratings yet
- Log-Linear Models and Conditional Random FieldselsDocument27 pagesLog-Linear Models and Conditional Random Fieldselssd1802No ratings yet
- Machine Learning: The Hundred-Page BookDocument9 pagesMachine Learning: The Hundred-Page BookRahulNo ratings yet
- The Hundred Page Machine Learning BookDocument155 pagesThe Hundred Page Machine Learning Bookash12p88No ratings yet
- Logisticregression 2021Document78 pagesLogisticregression 2021Perike Chandra SekharNo ratings yet
- Machine Learning and Pattern Recognition Week 3 Intro - ClassificationDocument5 pagesMachine Learning and Pattern Recognition Week 3 Intro - ClassificationzeliawillscumbergNo ratings yet
- Models of Fraud Detection and Analysis of Payment Transactions Using Machine LearningDocument16 pagesModels of Fraud Detection and Analysis of Payment Transactions Using Machine LearningRockyRambo1No ratings yet
- Machine Learning: Emmanuel Okafor, PH.D., M.SC., B.EngDocument13 pagesMachine Learning: Emmanuel Okafor, PH.D., M.SC., B.EngAbubakarNo ratings yet
- Assignment 3 Part 1 and 4Document3 pagesAssignment 3 Part 1 and 4iquanquan10No ratings yet
- Lab7&8 NaiveBayesDocument5 pagesLab7&8 NaiveBayestin nguyenNo ratings yet
- Ambo University Inistitute of Technology Department of Computer ScienceDocument13 pagesAmbo University Inistitute of Technology Department of Computer Sciencesifan MirkenaNo ratings yet
- ML - Questions & AnswerDocument45 pagesML - Questions & Answermanta8057No ratings yet
- Naive Bayesian Classifier: National Institute of Technology SikkimDocument6 pagesNaive Bayesian Classifier: National Institute of Technology Sikkimankit sauravNo ratings yet
- Broadly, There Are 3 Types of Machine Learning Algorithms.Document33 pagesBroadly, There Are 3 Types of Machine Learning Algorithms.hbk.hariharanNo ratings yet
- Pattern Recognition: Lasse Holmstr Om and Petri KoistinenDocument10 pagesPattern Recognition: Lasse Holmstr Om and Petri KoistinenTalzzoft ElectrNo ratings yet
- CH 12Document37 pagesCH 12yashwanthr3No ratings yet
- hw1 f21112 Problems11Document2 pageshw1 f21112 Problems11happy_userNo ratings yet
- ML MergeDocument145 pagesML Mergemariel StolinNo ratings yet
- Multiclass Classification: 9.520 Class 06, 25 Feb 2008 Ryan RifkinDocument59 pagesMulticlass Classification: 9.520 Class 06, 25 Feb 2008 Ryan Rifkingheorghe garduNo ratings yet
- Multiclass Classification: 9.520 Class 06, 25 Feb 2008 Ryan RifkinDocument59 pagesMulticlass Classification: 9.520 Class 06, 25 Feb 2008 Ryan RifkinSarfaraz AhmadNo ratings yet
- Clustering ExamplesDocument47 pagesClustering Examplesdawit gebreyohansNo ratings yet
- Introduction. Binary Classification and Bayes Optimal ClassifierDocument7 pagesIntroduction. Binary Classification and Bayes Optimal ClassifierYiwei ChenNo ratings yet
- Machine LearningDocument6 pagesMachine LearningSushmita MhamaneNo ratings yet
- Lecture 10 Ensemble MethodsDocument69 pagesLecture 10 Ensemble MethodsLIU HengxuNo ratings yet
- Deep Learning As A Building Block in Probabilistic Models: Pierre-Alexandre MatteiDocument62 pagesDeep Learning As A Building Block in Probabilistic Models: Pierre-Alexandre Matteimartin.durand955No ratings yet
- Machine Learning - Lazy Learning: HapterDocument22 pagesMachine Learning - Lazy Learning: HapterSarah HajaratNo ratings yet
- Commonly Used Machine Learning AlgorithmsDocument27 pagesCommonly Used Machine Learning Algorithmssbs Analytics19-21No ratings yet
- Support Vector Machines: Trends & ControversiesDocument11 pagesSupport Vector Machines: Trends & ControversiesEZ112No ratings yet
- Fair SVMDocument10 pagesFair SVMMahbod (Matt) OLFATNo ratings yet
- Fuzzy Systems TheoryDocument32 pagesFuzzy Systems TheoryBMSNo ratings yet
- ML Terminologies PDFDocument44 pagesML Terminologies PDFKapildev KumarNo ratings yet
- An Experimental Study of Learning Curves For Statistical Pattern ClassifiersDocument4 pagesAn Experimental Study of Learning Curves For Statistical Pattern ClassifiersAnabel GarcíaNo ratings yet
- Logisticpp 2Document2 pagesLogisticpp 2SHRAVANI VISSAMSETTINo ratings yet
- LogisticppDocument4 pagesLogisticppSHRAVANI VISSAMSETTINo ratings yet
- Logistic RegressionDocument25 pagesLogistic RegressionSHRAVANI VISSAMSETTINo ratings yet
- Gyanoday Internship-Guidelines GRID-InDIA InternalDocument11 pagesGyanoday Internship-Guidelines GRID-InDIA InternalSHRAVANI VISSAMSETTINo ratings yet
- Video Title: From Problem Definition To Decision MakingDocument3 pagesVideo Title: From Problem Definition To Decision MakingArun SharmaNo ratings yet
- Automotive Supply Chain Standards: Comply or Die: Mmog/LeDocument4 pagesAutomotive Supply Chain Standards: Comply or Die: Mmog/LeImma NeNo ratings yet
- 2016 Endsem AnsDocument6 pages2016 Endsem AnsSingh ChitNo ratings yet
- 9 Grammar, Vocabulary, and Pronunciation ADocument6 pages9 Grammar, Vocabulary, and Pronunciation ANorbert VonnákNo ratings yet
- 05 CSA RegistersDocument51 pages05 CSA RegistersHengCYNo ratings yet
- Thingworx Training Brochure (12-04-2021)Document2 pagesThingworx Training Brochure (12-04-2021)Shaik Mahaboob BashaNo ratings yet
- Computer Assembly: Department of Computer Science, RUPPDocument28 pagesComputer Assembly: Department of Computer Science, RUPPOudom 22No ratings yet
- SAP S/4HANA Conversion and SAP System Upgrade Sample QuestionsDocument4 pagesSAP S/4HANA Conversion and SAP System Upgrade Sample QuestionsTushar WadzNo ratings yet
- Prototypes of CSI-based Induction Heating UnitsDocument12 pagesPrototypes of CSI-based Induction Heating UnitsdaudiNo ratings yet
- Libble-Eu Med8erer800Document46 pagesLibble-Eu Med8erer800Mae WestNo ratings yet
- Design and Simulation of A Rooftop Solar PV System Using PVsyst SoftwareDocument5 pagesDesign and Simulation of A Rooftop Solar PV System Using PVsyst Softwarefatemeh mohammadiNo ratings yet
- Manuel de Partes y Reparacion Cilindro RC 504Document2 pagesManuel de Partes y Reparacion Cilindro RC 504Mauricio Hermosilla OrellanaNo ratings yet
- The Gate Shall Be Operated by Rope Drum Hoist: Key PlanDocument1 pageThe Gate Shall Be Operated by Rope Drum Hoist: Key Planbalwant_negi7520No ratings yet
- ESQUEMA Ms-7529 (g31m3-v2) REV 1.1Document33 pagesESQUEMA Ms-7529 (g31m3-v2) REV 1.1RisoSilvaNo ratings yet
- Fibonacci Search: Observation On Unimodal FunctionsDocument5 pagesFibonacci Search: Observation On Unimodal FunctionsaleemsalmanNo ratings yet
- Chapter3 - Basic Processing UnitDocument47 pagesChapter3 - Basic Processing UnitPraveen AlapatiNo ratings yet
- AZ-104-MicrosoftAzureAdministrator LAB 02a Manage Subscriptions and RBACDocument7 pagesAZ-104-MicrosoftAzureAdministrator LAB 02a Manage Subscriptions and RBACgvroctaNo ratings yet
- I-Vu Building Automation System: Carrier® Chillervu™ - Psm-IoDocument2 pagesI-Vu Building Automation System: Carrier® Chillervu™ - Psm-IoOctavio Farid Rossi YumhaNo ratings yet
- Akash Soni Resume-1Document2 pagesAkash Soni Resume-1Bijender KaushikNo ratings yet
- BssDocument3 pagesBssaaaNo ratings yet
- Bitsler Double BTC ScriptDocument4 pagesBitsler Double BTC ScriptBİTCOİN SCRİPTNo ratings yet
- GV Series 4 Boiler ManualDocument96 pagesGV Series 4 Boiler ManualBruce GrantNo ratings yet
- Schedule Comments AttachmentDocument4 pagesSchedule Comments Attachmenthz135874100% (1)
- MR1751 - Pooja M - 1cr19mba62Document55 pagesMR1751 - Pooja M - 1cr19mba62Bryan JebulNo ratings yet
- JSS 1 Computer Studies 2nd Term ExamDocument4 pagesJSS 1 Computer Studies 2nd Term ExamGabbs Ade100% (4)
- Global Work in A Rapidly Changing World: Implications For MNEs and IndividualsDocument14 pagesGlobal Work in A Rapidly Changing World: Implications For MNEs and IndividualsKhondoker AliNo ratings yet
- JMA-7100 Series ARPA RadarDocument8 pagesJMA-7100 Series ARPA RadarNguyen Phuoc HoNo ratings yet
- Students - AI Track CS Master SaclayDocument50 pagesStudents - AI Track CS Master SaclayHoàngHenryNo ratings yet