Download as pdf or txt
You might also like
- Checklist Audit ISO 22000Document18 pagesChecklist Audit ISO 22000Abhishek Kumar Singh95% (20)
- ESPECIFICACIONES D12C Motor VolvoDocument44 pagesESPECIFICACIONES D12C Motor VolvoErika Salinas100% (4)
- Ziehm Solo FD Service ManualDocument442 pagesZiehm Solo FD Service Manualdrakon100% (1)
- Small Unmanned Aircraft: Theory and PracticeFrom EverandSmall Unmanned Aircraft: Theory and PracticeRating: 4.5 out of 5 stars4.5/5 (2)
- Dino Gigante (Ingles)Document16 pagesDino Gigante (Ingles)CamillaAmaral100% (3)
- Conceptual Sizing of Next Supersonic Passenger Aircraft From RegressionDocument8 pagesConceptual Sizing of Next Supersonic Passenger Aircraft From RegressionAlessandro CastelvetriNo ratings yet
- Conceptual Design of Conventional and Oblique Wing Configurations For Small Supersonic AircraftDocument17 pagesConceptual Design of Conventional and Oblique Wing Configurations For Small Supersonic AircraftArturo PinedaNo ratings yet
- John C. Vassberg, Mark A. DehaanDocument22 pagesJohn C. Vassberg, Mark A. Dehaanfarah soufianeNo ratings yet
- Morphing Wing Flaps For Large Civil AircraftDocument16 pagesMorphing Wing Flaps For Large Civil Aircraftshixian guoNo ratings yet
- DLRK2015 370087 Postref PreprintDocument14 pagesDLRK2015 370087 Postref PreprintSam MonnierNo ratings yet
- Aerospace: Configuration Study of Electric Helicopters For Urban Air MobilityDocument19 pagesAerospace: Configuration Study of Electric Helicopters For Urban Air MobilityONo ratings yet
- Methods For Conceptual Flight Control System DesignDocument19 pagesMethods For Conceptual Flight Control System DesigndpnairNo ratings yet
- A Hierarchical Aircraft Life Cycle Cost Analysis ModelDocument19 pagesA Hierarchical Aircraft Life Cycle Cost Analysis ModelAdolfo CasillaVargasNo ratings yet
- Structural Analysis of A Rotorcraft Fuselage in A Multidisciplinary EnvironmentDocument20 pagesStructural Analysis of A Rotorcraft Fuselage in A Multidisciplinary EnvironmentAlper DedeNo ratings yet
- Aerospace 09 00279 v2Document35 pagesAerospace 09 00279 v2FLY XNo ratings yet
- High-Downforce Aerofoil Design For MotorsportsDocument13 pagesHigh-Downforce Aerofoil Design For MotorsportsAntony BalconyNo ratings yet
- 10 1016/j Paerosci 2019 01 006Document66 pages10 1016/j Paerosci 2019 01 006ONo ratings yet
- Applied Sciences: Feasibility of A Helium Closed-Cycle Gas Turbine For UAV PropulsionDocument18 pagesApplied Sciences: Feasibility of A Helium Closed-Cycle Gas Turbine For UAV PropulsionTabog SkiNo ratings yet
- Current and Near-Term RLV-Hypersonic Vehicle Programs PDFDocument24 pagesCurrent and Near-Term RLV-Hypersonic Vehicle Programs PDFAthul JosephNo ratings yet
- 1 s2.0 S0376042122000070 MainDocument29 pages1 s2.0 S0376042122000070 Mainsanskar.maddiNo ratings yet
- Eucass2017 204Document16 pagesEucass2017 204joseph.mangan1892No ratings yet
- Sub Scale Flight TestingDocument10 pagesSub Scale Flight TestingRajeuv GovindanNo ratings yet
- Drones: Optimization Methods Applied To Motion Planning of Unmanned Aerial Vehicles: A ReviewDocument22 pagesDrones: Optimization Methods Applied To Motion Planning of Unmanned Aerial Vehicles: A ReviewvanhaimtaNo ratings yet
- Multi-Element Airfoil Configurations For Wind TurbDocument14 pagesMulti-Element Airfoil Configurations For Wind TurbMahmoud MoussaNo ratings yet
- Airframe Technologies For Efficiency IWACC May 2012 NASADocument38 pagesAirframe Technologies For Efficiency IWACC May 2012 NASAffontanaNo ratings yet
- VSAT2 - 33441 IJAERok15503 15512new2Document11 pagesVSAT2 - 33441 IJAERok15503 15512new2David SiegfriedNo ratings yet
- APSDS VS FAA - DviDocument12 pagesAPSDS VS FAA - Dviحسين الشهريNo ratings yet
- A Review of Morphing AircraftDocument56 pagesA Review of Morphing AircraftFachri Agung NRNo ratings yet
- Project On UAV Design For Flight Competition in SAE Aero Design West-2013Document12 pagesProject On UAV Design For Flight Competition in SAE Aero Design West-2013Arenas Lopez ShermanNo ratings yet
- DetersKleinkeSelig 2017 AIAA 2017 3743 StaticUAVDocument35 pagesDetersKleinkeSelig 2017 AIAA 2017 3743 StaticUAVshakur mahmoodNo ratings yet
- Final1 Recreate Final Report Publishable SummaryDocument364 pagesFinal1 Recreate Final Report Publishable SummaryHuanyu BaiNo ratings yet
- Research and Application of MAEU UAVsDocument20 pagesResearch and Application of MAEU UAVsThein Than LinNo ratings yet
- 2016 Zaccai Et Al. Design Methodology For Trailing Edge High Lift MechanismsDocument15 pages2016 Zaccai Et Al. Design Methodology For Trailing Edge High Lift MechanismsYvessNo ratings yet
- Aerospace: Quasi-3D Aerodynamic Analysis Method For Blended-Wing-Body UAV ConfigurationsDocument19 pagesAerospace: Quasi-3D Aerodynamic Analysis Method For Blended-Wing-Body UAV Configurationsoguzhanguner651No ratings yet
- 11 - Future Technology and Aircraft TypesDocument10 pages11 - Future Technology and Aircraft TypeszamarrNo ratings yet
- Planning For The Application of ARP4754A For New and Modified Aircraft Projects With New, Simple, and Reused SystemsDocument9 pagesPlanning For The Application of ARP4754A For New and Modified Aircraft Projects With New, Simple, and Reused SystemsLucas LazaméNo ratings yet
- Cost Metrics For Unmanned Aerial Vehicles: September 2005Document7 pagesCost Metrics For Unmanned Aerial Vehicles: September 2005Elias Jose Akle VillarealNo ratings yet
- Defense Technical Information Center Compilation Part NoticeDocument10 pagesDefense Technical Information Center Compilation Part Noticeshamen AmarasekaraNo ratings yet
- Unmanned Aerial Vehicles Design Education Techniques and ChallengesDocument14 pagesUnmanned Aerial Vehicles Design Education Techniques and ChallengesTrial SeriesNo ratings yet
- Design and Test of A Uav Blended Wing Body Configuration: January 2012Document12 pagesDesign and Test of A Uav Blended Wing Body Configuration: January 2012BALAJI MUNISAMYNo ratings yet
- Design and Analysis of A Wing With Foldable Winglet Using Morphing TechnologyDocument11 pagesDesign and Analysis of A Wing With Foldable Winglet Using Morphing TechnologySubash DhakalNo ratings yet
- PV2007 1730Document1 pagePV2007 1730Jay VoraNo ratings yet
- Aircraft Life Cycle CostDocument18 pagesAircraft Life Cycle CostArun SasiNo ratings yet
- Rostami 2020Document10 pagesRostami 2020enes coşkunNo ratings yet
- Design of Low Altitude Long Endurance Solar-Powered UAV Using Genetic AlgorithmDocument24 pagesDesign of Low Altitude Long Endurance Solar-Powered UAV Using Genetic Algorithm이재국No ratings yet
- A Design Method For Supersonic Transport WingsDocument11 pagesA Design Method For Supersonic Transport Wings李子木No ratings yet
- Designing Airspace For Urban Air Mobility - A Review of Concepts and ApproachesDocument27 pagesDesigning Airspace For Urban Air Mobility - A Review of Concepts and Approaches정종욱No ratings yet
- A Review of Current Research in Subscale Flight Testing and Analysis of Its Main Practical ChallengesDocument35 pagesA Review of Current Research in Subscale Flight Testing and Analysis of Its Main Practical ChallengesTestNo ratings yet
- Bollino 2008Document18 pagesBollino 2008Jaime Luis Estanislao HonradoNo ratings yet
- DARPA Emerging TechnologiesDocument23 pagesDARPA Emerging TechnologiestommyrutagiraNo ratings yet
- Transportation ScienceDocument25 pagesTransportation ScienceJhonattan OrihuelaNo ratings yet
- Drones: Analysis of Autonomous Unmanned Aerial Systems Based On Operational Scenarios Using Value ModellingDocument17 pagesDrones: Analysis of Autonomous Unmanned Aerial Systems Based On Operational Scenarios Using Value ModellingNourhan FathyNo ratings yet
- Development of A Modular, Generic Helicopter Flight Dynamics Model For Real-Time SimulationsDocument18 pagesDevelopment of A Modular, Generic Helicopter Flight Dynamics Model For Real-Time Simulationslord-sothNo ratings yet
- Hybrid Power Systems in Multi-Rotor UAVs A ScientiDocument26 pagesHybrid Power Systems in Multi-Rotor UAVs A ScientibabuuspNo ratings yet
- Bio-Inspired Flapping UAV Design: A University PerspectiveDocument13 pagesBio-Inspired Flapping UAV Design: A University PerspectiveNourhan FathyNo ratings yet
- A Review of Morphing Aircraft PDFDocument56 pagesA Review of Morphing Aircraft PDFAustin GopiNo ratings yet
- Aerospace Engineer Research PaperDocument7 pagesAerospace Engineer Research Paperafeawfxlb100% (1)
- Aerospace Science and Technology: James G. Coder, Dan M. SomersDocument11 pagesAerospace Science and Technology: James G. Coder, Dan M. SomersSaloop T SNo ratings yet
- Modern Aircraft Design Techniques (William H. Mason)Document24 pagesModern Aircraft Design Techniques (William H. Mason)aeroacademicNo ratings yet
- Master PlanningDocument3 pagesMaster PlanningIgnacio TabuadaNo ratings yet
- 1 s2.0 S100093611830222X MainDocument16 pages1 s2.0 S100093611830222X MainGabriel Jérôme Vargas MoyaNo ratings yet
- Understanding Aerodynamics: Arguing from the Real PhysicsFrom EverandUnderstanding Aerodynamics: Arguing from the Real PhysicsRating: 4.5 out of 5 stars4.5/5 (2)
- Sense and Avoid in UAS: Research and ApplicationsFrom EverandSense and Avoid in UAS: Research and ApplicationsRating: 5 out of 5 stars5/5 (1)
- Real Time Road Sign Recognition System For Autonomous CarDocument14 pagesReal Time Road Sign Recognition System For Autonomous CarVipul MistryNo ratings yet
- REGION 11 FinalDocument61 pagesREGION 11 FinalRo Lai Yah BerbañoNo ratings yet
- Lesson Plan Format (Acad)Document4 pagesLesson Plan Format (Acad)Aienna Lacaya MatabalanNo ratings yet
- Nuilding Acoustics Through Europe Volume 2Document572 pagesNuilding Acoustics Through Europe Volume 2salyNo ratings yet
- Noise Computational Problem and Objective Type Questions For Quiz ShowDocument39 pagesNoise Computational Problem and Objective Type Questions For Quiz ShowJhasper ManagyoNo ratings yet
- Three Dimensional GeometryDocument3 pagesThree Dimensional GeometryTaqi IsmailNo ratings yet
- Basic Equation in Fluid MechanicsDocument9 pagesBasic Equation in Fluid Mechanicsapi-286406608No ratings yet
- Semi Soft Coking Coal and PCI CoalDocument2 pagesSemi Soft Coking Coal and PCI CoalYusuff QuadrilateralNo ratings yet
- Design of Partition PlateDocument5 pagesDesign of Partition Platepippo2378793No ratings yet
- Up ListDocument200 pagesUp Listprashant guptaNo ratings yet
- Repro enDocument20 pagesRepro enWai Mei TeeNo ratings yet
- Basic Monte Carlo TechniquesDocument10 pagesBasic Monte Carlo TechniquesMobeen AhmadNo ratings yet
- Experiment 4 Turbine CharacteristicsDocument12 pagesExperiment 4 Turbine CharacteristicsChong Ru YinNo ratings yet
- Stalking & Dreaming PDFDocument4 pagesStalking & Dreaming PDFJoannaAllen100% (2)
- 1.1 India and Its Rich Culture: Socio-Cultural CentreDocument102 pages1.1 India and Its Rich Culture: Socio-Cultural CentrePrarthana GhoshNo ratings yet
- Environmental EthicsDocument6 pagesEnvironmental EthicsHELI SHAHNo ratings yet
- FS-C5100-C5200-C5300 PartsDocument47 pagesFS-C5100-C5200-C5300 PartsDennis LeeNo ratings yet
- General Twin Seal 06Document24 pagesGeneral Twin Seal 06Gk GaneshNo ratings yet
- CoEpower SVG AHF Price ListDocument2 pagesCoEpower SVG AHF Price ListChristian Huanca OscoNo ratings yet
- Bas920 DatasheetDocument5 pagesBas920 Datasheetd_macuraNo ratings yet
- CH 7 - Project ControlDocument12 pagesCH 7 - Project ControlJeffrey CaparasNo ratings yet
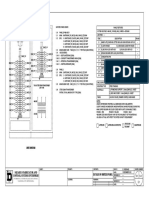
- Panel Features: Square-D Fabricator and Control Systems EnterpriseDocument1 pagePanel Features: Square-D Fabricator and Control Systems EnterpriseCallista CollectionsNo ratings yet
- Tools and Service Items: A/C Can TapsDocument15 pagesTools and Service Items: A/C Can Tapshome businessNo ratings yet
- PSC Unit 3Document18 pagesPSC Unit 3Santosh ReddyNo ratings yet
- Samsung Galaxy S22 Ultra 5G - Full Phone SpecificationsDocument13 pagesSamsung Galaxy S22 Ultra 5G - Full Phone SpecificationsAb BossNo ratings yet
- Cryolite JM File 2011Document5 pagesCryolite JM File 2011mutemuNo ratings yet