Download as pdf or txt
You might also like
- BÁO CÁO CUNG CẤP ĐIỆN KHU DÂN CƯ (Nhóm 20)Document33 pagesBÁO CÁO CUNG CẤP ĐIỆN KHU DÂN CƯ (Nhóm 20)congidaukho papa100% (1)
- DKMD 1a DCMDocument34 pagesDKMD 1a DCMĐức ThuậnNo ratings yet
- DKMD 3b FOC TiepApDocument26 pagesDKMD 3b FOC TiepApThiện HàNo ratings yet
- DKMD 0 IntroductionDocument19 pagesDKMD 0 IntroductionĐức ThuậnNo ratings yet
- DKMD 3b FOCDocument37 pagesDKMD 3b FOCThiện HàNo ratings yet
- GT Trang Bi Dien 1-2 Yen BaiDocument118 pagesGT Trang Bi Dien 1-2 Yen Bainguyễn thanh hoaNo ratings yet
- DKMD 2 ScalarControlDocument46 pagesDKMD 2 ScalarControlĐức ThuậnNo ratings yet
- De Cuong CCDDocument19 pagesDe Cuong CCDPhillip NguyenNo ratings yet
- MẠNG NƠ-RON NHÂN TẠO XÁC ĐỊNH ĐIỂM CÔNG SUẤT CỰC ĐẠI CHO XE ĐIỆN NĂNG LƯỢNG MẶT TRỜIDocument25 pagesMẠNG NƠ-RON NHÂN TẠO XÁC ĐỊNH ĐIỂM CÔNG SUẤT CỰC ĐẠI CHO XE ĐIỆN NĂNG LƯỢNG MẶT TRỜIdhpthuNo ratings yet
- Chuong 1 - Tong Quan Ve Tu Dong Hoa HTL 2023Document47 pagesChuong 1 - Tong Quan Ve Tu Dong Hoa HTL 2023CuongNo ratings yet
- Đồ Án Mẫu Điện Tử Công SuấtDocument36 pagesĐồ Án Mẫu Điện Tử Công SuấtThanh TùngNo ratings yet
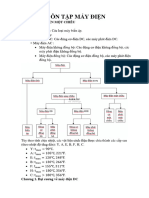
- ÔN TẬP MÁY ĐIỆNDocument11 pagesÔN TẬP MÁY ĐIỆN22142124No ratings yet
- Chuong 8 Bu Cong Suat Phan KhangDocument23 pagesChuong 8 Bu Cong Suat Phan KhangCường Nguyễn CaoNo ratings yet
- Bai 15 MACH DIEU KHIEN TOC DO DONG CO 1 PHADocument19 pagesBai 15 MACH DIEU KHIEN TOC DO DONG CO 1 PHAtcth_amyNo ratings yet
- Đề Cương Trang Bị Điện Chi TiếtDocument128 pagesĐề Cương Trang Bị Điện Chi TiếtThế Anh TrầnNo ratings yet
- BTL ĐKTĐ10Document21 pagesBTL ĐKTĐ10Nguyen Canh Bac100% (1)
- ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ DCDocument28 pagesĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ DCM O O BNo ratings yet
- 07 - MEP - FOC - Điều khiển vectorDocument19 pages07 - MEP - FOC - Điều khiển vectorMinh VõNo ratings yet
- (123doc) - Bai-Tap-Vi-Xu-Ly-Ho-Vi-Dieu-Khien-8051Document113 pages(123doc) - Bai-Tap-Vi-Xu-Ly-Ho-Vi-Dieu-Khien-8051DucNo ratings yet
- AC FullDocument355 pagesAC FullĐINH ANH TÙNGNo ratings yet
- Dieu Khien Dong Co 1 ChieuDocument44 pagesDieu Khien Dong Co 1 ChieuTrương Văn TrọngNo ratings yet
- Lời Nói ĐầuDocument71 pagesLời Nói ĐầuTien Tien TiNo ratings yet
- THIẾT KẾ BỘ NGUỒN BĂM XUNG ÁP MỘT CHIỀU ĐIỀU KHIỂN ĐỘNG CƠ MỘT CHIỀU CÓ ĐẢO CHIỀUDocument21 pagesTHIẾT KẾ BỘ NGUỒN BĂM XUNG ÁP MỘT CHIỀU ĐIỀU KHIỂN ĐỘNG CƠ MỘT CHIỀU CÓ ĐẢO CHIỀUNga Trưởng NguyễnNo ratings yet
- Bài Giảng Tuần 1Document53 pagesBài Giảng Tuần 1Thắng HoàngNo ratings yet
- Đồ Án Điện Tử Công Suất: Thiết Kế Bộ Chỉnh Lưu Cầu Ba Pha Điều Khiển Tốc Độ Động Cơ Điện Một Chiều Kích Từ Độc LậpDocument52 pagesĐồ Án Điện Tử Công Suất: Thiết Kế Bộ Chỉnh Lưu Cầu Ba Pha Điều Khiển Tốc Độ Động Cơ Điện Một Chiều Kích Từ Độc LậpNTQ VlogsNo ratings yet
- CK 2015Document7 pagesCK 2015Phương LêNo ratings yet
- Class 1 IntroductionDocument36 pagesClass 1 Introductionthuongthoi6223No ratings yet
- AI LẤY THÌ CHO CẦN ĐÉO GÌ NGUỒNDocument30 pagesAI LẤY THÌ CHO CẦN ĐÉO GÌ NGUỒNTrần Kim NhậtNo ratings yet
- GT THHDC1Document14 pagesGT THHDC1Thuong NguyenNo ratings yet
- DC Ac PDFDocument193 pagesDC Ac PDFĐINH ANH TÙNGNo ratings yet
- Bao Cao Dtcs Nhom6Document29 pagesBao Cao Dtcs Nhom6vuongduongpktNo ratings yet
- CDT_C 2. Các Nguyên Tắc Điều KhiểnDocument51 pagesCDT_C 2. Các Nguyên Tắc Điều KhiểnI Love fo3No ratings yet
- CHƯƠNG 1 ĐỘNG CƠ 1 CHIỀUDocument31 pagesCHƯƠNG 1 ĐỘNG CƠ 1 CHIỀULong NguyễnNo ratings yet
- Chapter13 - Effect of Model Parameter ErrorsDocument12 pagesChapter13 - Effect of Model Parameter Errorstuan kha hongNo ratings yet
- BG Tuần 1Document52 pagesBG Tuần 1nvson.dhdi15a1hnNo ratings yet
- Bien Doi Nang Luong Dien Co Nguyen Ngoc Tu BDNLDC 1 Gioi Thieu Ve He Thong Dien (Cuuduongthancong - Com)Document27 pagesBien Doi Nang Luong Dien Co Nguyen Ngoc Tu BDNLDC 1 Gioi Thieu Ve He Thong Dien (Cuuduongthancong - Com)Trần Võ Phúc HưngNo ratings yet
- Thuyết Minh: Biến Tần 4QDocument19 pagesThuyết Minh: Biến Tần 4QThành Duy NguyễnNo ratings yet
- Dieu Khien Logic - Chuong 2Document19 pagesDieu Khien Logic - Chuong 2NganNo ratings yet
- bài tập ứng dụng điện tự công suất và lý thuyết cuối kỳDocument11 pagesbài tập ứng dụng điện tự công suất và lý thuyết cuối kỳĐức Nguyễn VươngNo ratings yet
- Bao Cao Bai Tap Lon - DLDKBMT 15072019Document21 pagesBao Cao Bai Tap Lon - DLDKBMT 15072019TINH LinhNo ratings yet
- DAChương 7Document12 pagesDAChương 7Nguyễn Công HưngNo ratings yet
- Bài 1 - Dtcs Và Ud (Tuan8)Document40 pagesBài 1 - Dtcs Và Ud (Tuan8)Vỹ ĐoànNo ratings yet
- Ch.1. Tinh Toan Phu TaiDocument16 pagesCh.1. Tinh Toan Phu TaiTú TrầnNo ratings yet
- ĐỒ ÁN MÁY ĐIỆN MỘT CHIỀUDocument21 pagesĐỒ ÁN MÁY ĐIỆN MỘT CHIỀUlanhhuyetkiemNo ratings yet
- ĐỀ CƯƠNG TỰ ĐỘNG HOÁ VÀ ĐIỀU KHIỂN THIẾT BỊ ĐIỆNDocument9 pagesĐỀ CƯƠNG TỰ ĐỘNG HOÁ VÀ ĐIỀU KHIỂN THIẾT BỊ ĐIỆNkimjiwon1408No ratings yet
- 6 MDDC - Quan He Dien TuDocument7 pages6 MDDC - Quan He Dien Tusamsungtvqseries55No ratings yet
- Chương 1Document70 pagesChương 1phamquangcaoNo ratings yet
- Đề cương CN 12 cuối HK1Document7 pagesĐề cương CN 12 cuối HK1dangdiemquynh6576No ratings yet
- Nhóm 2 NLTTDocument13 pagesNhóm 2 NLTT20142471No ratings yet
- Báo Cáo Đồ Án: Trường Đại Học Bách Khoa Thành Phố Hồ Chí MinhDocument90 pagesBáo Cáo Đồ Án: Trường Đại Học Bách Khoa Thành Phố Hồ Chí MinhNguyễn Quang HuyNo ratings yet
- BAI 1 SC Ngu N ĐHKKDocument32 pagesBAI 1 SC Ngu N ĐHKKvodinhluuNo ratings yet
- Mach Dieu Khien Dong Co Dien Tiet 46Document8 pagesMach Dieu Khien Dong Co Dien Tiet 46Nguyễn NaNo ratings yet
- Nhóm 8Document35 pagesNhóm 8PBC21No ratings yet
- ÔnĐinh HTĐDocument48 pagesÔnĐinh HTĐtranhung231220012312No ratings yet
- Boost ConverterDocument35 pagesBoost ConverterBùi Văn Lyd67% (3)
- C1 TĐĐDocument33 pagesC1 TĐĐTùng - 66MEC1 Trần XuânNo ratings yet
- 3.TN03 - Máy Điện Một ChiềuDocument24 pages3.TN03 - Máy Điện Một Chiềuhungduynguyenmmotiktok008No ratings yet
- (123doc) - Tong-Quan-Ve-He-Truyen-Dong-Trong-May-Cnc-Mo-Phong-Noi-Suy-Tren-Matlab-Dieu-Khien-Ve-Tren-SimulinkDocument32 pages(123doc) - Tong-Quan-Ve-He-Truyen-Dong-Trong-May-Cnc-Mo-Phong-Noi-Suy-Tren-Matlab-Dieu-Khien-Ve-Tren-SimulinkHùngNo ratings yet