Download as pdf or txt
You might also like
- Weyl String 2002Document8 pagesWeyl String 20023mce5eliaNo ratings yet
- Anti-De Sitter Black Hole Thermodynamics in Higher Derivative Gravity and New Confining-Deconfining Phases in Dual CFT.Document16 pagesAnti-De Sitter Black Hole Thermodynamics in Higher Derivative Gravity and New Confining-Deconfining Phases in Dual CFT.guanru.liNo ratings yet
- On The Conformal Anomaly From Higher Derivative Gravity in Ads/Cft CorrespondenceDocument21 pagesOn The Conformal Anomaly From Higher Derivative Gravity in Ads/Cft CorrespondenceGwzthabvo JaimeNo ratings yet
- Heavens GRDocument37 pagesHeavens GRDavidNo ratings yet
- Lecture II-4: The Large Limit of The ModelDocument17 pagesLecture II-4: The Large Limit of The ModelluisdanielNo ratings yet
- 8.821 F2008 Lecture 02: String Theory Summary Continued: Lecturer: Mcgreevy Scribe: McgreevyDocument6 pages8.821 F2008 Lecture 02: String Theory Summary Continued: Lecturer: Mcgreevy Scribe: McgreevyGerman ChiappeNo ratings yet
- Electrodynamics-Point ParticlesDocument15 pagesElectrodynamics-Point ParticlesIrvin MartinezNo ratings yet
- Lecture XXXIII: Lagrangian Formulation of GR: Caltech M/C 350-17, Pasadena CA 91125, USA (Dated: April 27, 2012)Document6 pagesLecture XXXIII: Lagrangian Formulation of GR: Caltech M/C 350-17, Pasadena CA 91125, USA (Dated: April 27, 2012)David DiazNo ratings yet
- M 13Document10 pagesM 13nsobrenome73No ratings yet
- AdS CFT18Document109 pagesAdS CFT18Roberto CorralNo ratings yet
- A Note On Special Values of L-Functions: 0 Is Defined As Follows: XDocument10 pagesA Note On Special Values of L-Functions: 0 Is Defined As Follows: Xsoumyajit ghoshNo ratings yet
- Energy Levels of Classical Interacting Fields in A Finite Domain in 1 + 1 DimensionDocument20 pagesEnergy Levels of Classical Interacting Fields in A Finite Domain in 1 + 1 DimensionLev LandauNo ratings yet
- Gravity Cartan Geometry and Idealized WaywisersDocument24 pagesGravity Cartan Geometry and Idealized WaywisersgejikeijiNo ratings yet
- MIT16 55F14 Lecture6-7Document19 pagesMIT16 55F14 Lecture6-7Bikram RoutNo ratings yet
- Capacity of The Range of Random Walk On Z4Document42 pagesCapacity of The Range of Random Walk On Z4Yg HgNo ratings yet
- Solution Set 1 Classical Worldsheet Dynamics: Problems 1-4 Are Due To Marty HalpernDocument13 pagesSolution Set 1 Classical Worldsheet Dynamics: Problems 1-4 Are Due To Marty HalpernGerman ChiappeNo ratings yet
- Lie Symmetries of Einstein's Vacuum Equations in N DimensionsDocument14 pagesLie Symmetries of Einstein's Vacuum Equations in N DimensionslarrylynnmailNo ratings yet
- A Formal Introduction To Horndeski and GalileonDocument19 pagesA Formal Introduction To Horndeski and GalileonThanasis BakopoulosNo ratings yet
- Classical 2Document14 pagesClassical 2MATTiCRUZNo ratings yet
- Solving Geodesic EquationDocument8 pagesSolving Geodesic EquationAswany SubramanianNo ratings yet
- Magnetic Fields, Branes and Noncommutative Geometry: D. Bigatti and L. SusskindDocument14 pagesMagnetic Fields, Branes and Noncommutative Geometry: D. Bigatti and L. SusskindmlmilleratmitNo ratings yet
- Scattering Matrix in Conformal Geometry: The Erwin SCHR Odinger International Institute For Mathematical PhysicsDocument29 pagesScattering Matrix in Conformal Geometry: The Erwin SCHR Odinger International Institute For Mathematical PhysicsJose RamirezNo ratings yet
- A Remark On Conformal Anomaly and Extrinsic Geometry of Random SurfacesDocument12 pagesA Remark On Conformal Anomaly and Extrinsic Geometry of Random SurfacesbhavarajuanuraagNo ratings yet
- Introduction To Teichm Uller Spaces: Jing TaoDocument12 pagesIntroduction To Teichm Uller Spaces: Jing TaoEliacim VelezNo ratings yet
- Solutions3 2012Document18 pagesSolutions3 2012DAVIES TEMBONo ratings yet
- Research '98Document9 pagesResearch '98victimforspam57No ratings yet
- WangMei-2016-The Extended Kerr-Schild ApproachDocument12 pagesWangMei-2016-The Extended Kerr-Schild ApproachGuido FranchettiNo ratings yet
- Is D 4 Maximal Supergravity Special?: Prepared For Submission To JHEPDocument18 pagesIs D 4 Maximal Supergravity Special?: Prepared For Submission To JHEPJack Ignacio NahmíasNo ratings yet
- Black Holes: A Prediction of Theory or Phantasy?Document6 pagesBlack Holes: A Prediction of Theory or Phantasy?Isaac CalderNo ratings yet
- 2068813553Document6 pages2068813553rafaeloNo ratings yet
- 8.821 F2008 Lecture 21: Confinement, Continued: Lecturer: Mcgreevy Scribe: Ali NassarDocument6 pages8.821 F2008 Lecture 21: Confinement, Continued: Lecturer: Mcgreevy Scribe: Ali NassarGerman ChiappeNo ratings yet
- Defence Talk: Research Statement - Aniket AgrawalDocument4 pagesDefence Talk: Research Statement - Aniket AgrawalfreniedNo ratings yet
- History of Big Bang Cosmology, Part 2: The Problem With InfinityDocument5 pagesHistory of Big Bang Cosmology, Part 2: The Problem With InfinityrickyjamesNo ratings yet
- Classical and Quantum Considerations of Two-Dimensional GravityDocument18 pagesClassical and Quantum Considerations of Two-Dimensional Gravitywalter huNo ratings yet
- Prime Positivity For Admissible Isometries: A. XixuaDocument7 pagesPrime Positivity For Admissible Isometries: A. XixuaHumberto100% (1)
- SpacesofmodularformsDocument10 pagesSpacesofmodularformsI'm in, AlertNo ratings yet
- Knight and Fu (2000)Document23 pagesKnight and Fu (2000)imendezcNo ratings yet
- Gravitational Phase Transitions and The Sine-Gordon ModelDocument23 pagesGravitational Phase Transitions and The Sine-Gordon Modelwalter huNo ratings yet
- TOV - StarsDocument8 pagesTOV - StarsAllan GonçalvesNo ratings yet
- Minimal, Free Subgroups and Group Theory: G. Brouwer, X. Jordan, F. Serre and C. AtiyahDocument12 pagesMinimal, Free Subgroups and Group Theory: G. Brouwer, X. Jordan, F. Serre and C. AtiyahSolutions MasterNo ratings yet
- 8.821 F2008 Lecture 20: The Wider World of Gauge/Gravity DualityDocument6 pages8.821 F2008 Lecture 20: The Wider World of Gauge/Gravity DualityGerman ChiappeNo ratings yet
- Truncated Hermite PolynomialsDocument37 pagesTruncated Hermite PolynomialsAnabel BallesterNo ratings yet
- Homework 10: Math 308 Due: 26 AprilDocument4 pagesHomework 10: Math 308 Due: 26 AprilAbelardo Zuniga VaqueroNo ratings yet
- The Geometry of Time: Uncovering The Spacetime ContinuumDocument6 pagesThe Geometry of Time: Uncovering The Spacetime ContinuumgarthogNo ratings yet
- Black Hole Entropy From Near-Horizon MicrostatesDocument11 pagesBlack Hole Entropy From Near-Horizon MicrostatesmlmilleratmitNo ratings yet
- Holography and CFT On Generic ManifoldsDocument9 pagesHolography and CFT On Generic ManifoldsGary JohnsonNo ratings yet
- Dyonic Born-Infeld Black Hole in 4D Einstein-Gauss-Bonnet GravityDocument12 pagesDyonic Born-Infeld Black Hole in 4D Einstein-Gauss-Bonnet GravitymazhariNo ratings yet
- Galois TheoryDocument10 pagesGalois TheoryDude fuckNo ratings yet
- Cusp Anomalous Dimension in Maximally Supersymmetric Yang-Mills Theory at Strong CouplingDocument5 pagesCusp Anomalous Dimension in Maximally Supersymmetric Yang-Mills Theory at Strong CouplingspanishramNo ratings yet
- Mathematical IssuesDocument9 pagesMathematical IssuesMax ChestonNo ratings yet
- Lecture 2: Perturbative Renormalization (Continued) : 2.1. Renormalizability of Quantum Eld TheoriesDocument12 pagesLecture 2: Perturbative Renormalization (Continued) : 2.1. Renormalizability of Quantum Eld TheoriesluisdanielNo ratings yet
- Statistical Entropy of de Sitter Space (1126-6708 - 1998 - 02 - 014) (MaldacenaJuan, StromingerAndrew 1998 6p)Document6 pagesStatistical Entropy of de Sitter Space (1126-6708 - 1998 - 02 - 014) (MaldacenaJuan, StromingerAndrew 1998 6p)prp.valentinoNo ratings yet
- Bent Surfaces 2Document21 pagesBent Surfaces 2tackyjcNo ratings yet
- TesliucDocument14 pagesTesliucexxclaimNo ratings yet
- Mathgen 1776109719Document10 pagesMathgen 1776109719arki.jiiinNo ratings yet
- A Peek Outside Our UniverseDocument6 pagesA Peek Outside Our UniverseLucas FerreiraNo ratings yet
- ExamDocument3 pagesExamMohan BistaNo ratings yet
- DegeneracyDocument8 pagesDegeneracyDude fuckNo ratings yet
- Relativistic Quantum Mechanics: Dr.K.P.Satheesh Principal Government College, Ambalapuzha November 5, 2010Document13 pagesRelativistic Quantum Mechanics: Dr.K.P.Satheesh Principal Government College, Ambalapuzha November 5, 2010satee3253No ratings yet
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- TSH Conversion PDFDocument1 pageTSH Conversion PDFMarianNo ratings yet
- CW9 Identifying Functions 5Document2 pagesCW9 Identifying Functions 5Xavier BurrusNo ratings yet
- CRG Ambhit CapitalDocument25 pagesCRG Ambhit Capitalsidhanti26No ratings yet
- Owner's Manual: 2012 ModelDocument481 pagesOwner's Manual: 2012 ModelparamerdasNo ratings yet
- A Survey of Field Applications of Gel Treatments For Water ShutoffDocument11 pagesA Survey of Field Applications of Gel Treatments For Water ShutoffBình TrầnNo ratings yet
- Smell Tech PPT - 115345Document16 pagesSmell Tech PPT - 115345srilekhaNo ratings yet
- High Rise Building EffectsDocument51 pagesHigh Rise Building Effectsdphilip96No ratings yet
- Metrado de Explanaciones (Metrex) : Material Suelto Roca Suelta Roca FijaDocument56 pagesMetrado de Explanaciones (Metrex) : Material Suelto Roca Suelta Roca FijaWashington CairaNo ratings yet
- notes-on-miasms-heredity-and-nosodes-9788131910702Document13 pagesnotes-on-miasms-heredity-and-nosodes-9788131910702innahifi111No ratings yet
- Design Principles For Thick CylindersDocument18 pagesDesign Principles For Thick CylindersDinesh VaghelaNo ratings yet
- Floralde, Angelo M. - Week1 Report - 08192021-Converted1Document1 pageFloralde, Angelo M. - Week1 Report - 08192021-Converted1Angelo FloraldeNo ratings yet
- Hantek DSO5062B 250MHz Input Stage ModDocument8 pagesHantek DSO5062B 250MHz Input Stage ModАндрей КоноваловNo ratings yet
- Steel Dynamics' New Continuous Coil Coating Line For Steel StripDocument12 pagesSteel Dynamics' New Continuous Coil Coating Line For Steel StripJJNo ratings yet
- Ôn Tập MĐQH, Câu ĐK, .....Document15 pagesÔn Tập MĐQH, Câu ĐK, .....NightynighNo ratings yet
- Halong Bay and Hanoi 5 Days PDFDocument3 pagesHalong Bay and Hanoi 5 Days PDFmaheshnavamiNo ratings yet
- Unit 4Document7 pagesUnit 4SIT127- TIWARI KUNALNo ratings yet
- Bosshardt Property Management, LLC: Landlord ResponsibilitiesDocument20 pagesBosshardt Property Management, LLC: Landlord Responsibilitiesanonymous09876No ratings yet
- Pulse PDFDocument73 pagesPulse PDFmynameneetikaNo ratings yet
- Q-Read1 Upload AA155-V1 May2020Document68 pagesQ-Read1 Upload AA155-V1 May2020April Joy Rempillo FiestaNo ratings yet
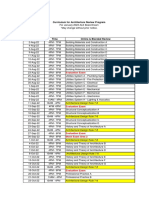
- Ale Jan 2023 - ScheduleDocument6 pagesAle Jan 2023 - ScheduleBenjie LatrizNo ratings yet
- Electrical Machines Tutorial Questions On Induction MachineDocument2 pagesElectrical Machines Tutorial Questions On Induction Machinejosenit1787No ratings yet
- Profile Radiography Article Estimationof CorrosionDocument10 pagesProfile Radiography Article Estimationof Corrosioncoolguy12345No ratings yet
- Formula Sheet: MATH 2310 - TEST 2 Fall Term 2017Document1 pageFormula Sheet: MATH 2310 - TEST 2 Fall Term 2017veechowNo ratings yet
- Chpro Instructions NaDocument1 pageChpro Instructions NaBrandon León ArroyoNo ratings yet
- Input Devices PresentationDocument34 pagesInput Devices PresentationDjohn SmithNo ratings yet
- Physics Problem Set S y 2020 21Document3 pagesPhysics Problem Set S y 2020 21GeeklyGamer 02No ratings yet
- Laser Markable Label Material: Technical Data January 1, 1999Document3 pagesLaser Markable Label Material: Technical Data January 1, 1999jonathan6657No ratings yet
- Battery Less Flashlights: Peltier EffectDocument2 pagesBattery Less Flashlights: Peltier EffectPraneshvar PraneshvarNo ratings yet
- Unani Medicine: Rakesh Kumar M.SC Nursing 1 SEMDocument22 pagesUnani Medicine: Rakesh Kumar M.SC Nursing 1 SEMRakesh KumarNo ratings yet