Download as pdf or txt
You might also like
- Psse ManualDocument760 pagesPsse ManualPradeep Katariya100% (2)
- BEF 22903 - Lecture 5 - Unbalanced Three-Phase CircuitsDocument13 pagesBEF 22903 - Lecture 5 - Unbalanced Three-Phase CircuitsJames LiewNo ratings yet
- Balanced Phase-Locked Loops For Optical Homodyne Receivers: Performance Analysis, Hesign Considerations, and Laser Linewidth RequirementsDocument14 pagesBalanced Phase-Locked Loops For Optical Homodyne Receivers: Performance Analysis, Hesign Considerations, and Laser Linewidth RequirementsYashanshu GautamNo ratings yet
- HV Ac Underground Cable Systems For Power Transmission - Ad Danish ExperienceDocument11 pagesHV Ac Underground Cable Systems For Power Transmission - Ad Danish ExperienceVishal AryaNo ratings yet
- Measurement and Instrumentation Lab 1Document10 pagesMeasurement and Instrumentation Lab 1Mompati Letsweletse100% (1)
- Pre-Standard: Publicly Available SpecificationDocument20 pagesPre-Standard: Publicly Available SpecificationNalex GeeNo ratings yet
- Particle-In-Cell Simulation of A Novel High Power Terahertz Vacuum Electron DeviceDocument6 pagesParticle-In-Cell Simulation of A Novel High Power Terahertz Vacuum Electron Deviceharun hakshiNo ratings yet
- QPSK Mod&Demodwith NoiseDocument32 pagesQPSK Mod&Demodwith Noisemanaswini thogaruNo ratings yet
- DTC Drive With ANN-Based Stator Flux Estimator (2005)Document10 pagesDTC Drive With ANN-Based Stator Flux Estimator (2005)leosensNo ratings yet
- Corona Discharge Under Non-Sinusoidal Voltage Excitation at Very Low FrequencyDocument4 pagesCorona Discharge Under Non-Sinusoidal Voltage Excitation at Very Low FrequencyHafiziAhmadNo ratings yet
- Aparna GupatDocument24 pagesAparna GupatAkshat SaxenaNo ratings yet
- Analysis of Very FastDocument6 pagesAnalysis of Very FastFelipe BittarNo ratings yet
- Telfer 2001 0413Document3 pagesTelfer 2001 0413Particle Beam Physics LabNo ratings yet
- Voelcker 1960Document8 pagesVoelcker 1960FAKHRI AhmedNo ratings yet
- Jsaer2014 01 02 44 54Document11 pagesJsaer2014 01 02 44 54jsaereditorNo ratings yet
- Palmer 2001 0420Document3 pagesPalmer 2001 0420Particle Beam Physics LabNo ratings yet
- The Use of Prony Analysis and Padé Approximation For The Identification of Transfer Functions of Excitation System ComponentsDocument2 pagesThe Use of Prony Analysis and Padé Approximation For The Identification of Transfer Functions of Excitation System ComponentsjandazNo ratings yet
- Synchronization MethodsDocument7 pagesSynchronization MethodsAmit KumarNo ratings yet
- A Wavelet-Based Algorithm For Disturbances Detection Using Oscillographic DataDocument6 pagesA Wavelet-Based Algorithm For Disturbances Detection Using Oscillographic DataVijay KrishnaNo ratings yet
- The System of Arc Lengths Regulation of An Electric Arc Furnace With A Neuro-ControllerDocument3 pagesThe System of Arc Lengths Regulation of An Electric Arc Furnace With A Neuro-ControllerpernetiNo ratings yet
- ENA - Lab - Manual (Update 17-4-2019) PDFDocument76 pagesENA - Lab - Manual (Update 17-4-2019) PDFMuhammad SaadNo ratings yet
- MOS Multiplier-Divider Cell For Analog VLSIDocument3 pagesMOS Multiplier-Divider Cell For Analog VLSIShwetaGautamNo ratings yet
- 5GHz VCODocument5 pages5GHz VCOnavinrkNo ratings yet
- Robust Adaptive Filtering Approach For Envelope and Harmonic EstimationDocument5 pagesRobust Adaptive Filtering Approach For Envelope and Harmonic EstimationFabien CallodNo ratings yet
- IgbtDocument7 pagesIgbtelvergonzalez1No ratings yet
- Real Time Control of An Active Power FilDocument10 pagesReal Time Control of An Active Power FilAbdelkarim CHEMIDINo ratings yet
- A Generalized Delayed Signal Cancellation Method For Detecting Fundamental-Frequency Positive-Sequence Three-Phase SignalsDocument10 pagesA Generalized Delayed Signal Cancellation Method For Detecting Fundamental-Frequency Positive-Sequence Three-Phase Signalssayali kthalkarNo ratings yet
- IEEE Experimental Comparison of Conventional and Optical Current TransformersDocument9 pagesIEEE Experimental Comparison of Conventional and Optical Current Transformersgovindarul4067No ratings yet
- An Efficient Inverter Circuit Design For Driving The Ultrasonic Welding TransducerDocument10 pagesAn Efficient Inverter Circuit Design For Driving The Ultrasonic Welding TransducernewvictorinNo ratings yet
- Analysis of The Behavior of One Digital Distance Relay Under Islanding Condition With ATPDocument6 pagesAnalysis of The Behavior of One Digital Distance Relay Under Islanding Condition With ATPJaime Florez ChoqueNo ratings yet
- 2007 - Mixdes07Document5 pages2007 - Mixdes07Animesh GhoshNo ratings yet
- New Cycle Slip Compensation TechniqueDocument2 pagesNew Cycle Slip Compensation TechniqueCarlos CarriNo ratings yet
- Cui 2015Document4 pagesCui 2015RicardoNo ratings yet
- Veriloga Model For PLLDocument4 pagesVeriloga Model For PLLlravikumar.19.eeeNo ratings yet
- The Flipped Voltage Follower A Useful Cell For Low-Voltage Low-Power Circuit DesignDocument16 pagesThe Flipped Voltage Follower A Useful Cell For Low-Voltage Low-Power Circuit Designpbaishya604No ratings yet
- Connect Passive Components To Logic GatesDocument11 pagesConnect Passive Components To Logic GatesqqazertyNo ratings yet
- 1997 Temperature in Natural and Artificial SystemsDocument10 pages1997 Temperature in Natural and Artificial SystemsZxNo ratings yet
- Jecet: Journal of Electronics and Communication Engineering & Technology (JECET)Document11 pagesJecet: Journal of Electronics and Communication Engineering & Technology (JECET)IAEME PublicationNo ratings yet
- Modeling of Transfer Function Characteristic of Rlc-CircuitDocument7 pagesModeling of Transfer Function Characteristic of Rlc-CircuitInternational Organization of Scientific Research (IOSR)No ratings yet
- Neukomm PDocument15 pagesNeukomm PDiego RodriguezNo ratings yet
- Numerical Relay: Modern Multifunctional Protection SystemDocument4 pagesNumerical Relay: Modern Multifunctional Protection SystemAbhisekh AnandNo ratings yet
- Advanced Digital Instrumentation For Partial-Discharge MeasurementDocument8 pagesAdvanced Digital Instrumentation For Partial-Discharge MeasurementAdrian PramantaNo ratings yet
- Dual-Frequency Modified C/V Technique: 150 125 100 7 5 1 50 25 / I 15MW/600nmDocument2 pagesDual-Frequency Modified C/V Technique: 150 125 100 7 5 1 50 25 / I 15MW/600nmkurabyqldNo ratings yet
- Optical ElectronicsDocument6 pagesOptical Electronicsscrutiny-IINo ratings yet
- Study of Abnormal Electrical Phenomena Effects Transformers: Dong, X. S. Liu, Y Wang, Wang, N.C. Line, E.L.Document2 pagesStudy of Abnormal Electrical Phenomena Effects Transformers: Dong, X. S. Liu, Y Wang, Wang, N.C. Line, E.L.nasirNo ratings yet
- Narrow-Band Switched-Capacitor Bandpass FiltersDocument16 pagesNarrow-Band Switched-Capacitor Bandpass FiltersEvelynlima02No ratings yet
- GetTRDoc - Electrical Properties and Power Considerations of A Piezoelectric ActuatorDocument9 pagesGetTRDoc - Electrical Properties and Power Considerations of A Piezoelectric ActuatorTerrence Howard HenryNo ratings yet
- A D-Q Synchronous Frame Controller For Single Phase InverterDocument7 pagesA D-Q Synchronous Frame Controller For Single Phase InvertershanNo ratings yet
- A Discharge Locating Probe For Rotating MachinesDocument3 pagesA Discharge Locating Probe For Rotating MachinesJINEETH JJOSEPHNo ratings yet
- Design and Analysis of Aerospace Arcing Faults Using Fast Fourier Transformation and Artificial Neural NetworkDocument6 pagesDesign and Analysis of Aerospace Arcing Faults Using Fast Fourier Transformation and Artificial Neural Network363331272No ratings yet
- Point-on-Wave Controller Developed For Circuit Breaker SwitchingDocument6 pagesPoint-on-Wave Controller Developed For Circuit Breaker SwitchingprabhuNo ratings yet
- TOMOGRAFO Design OF SENSOR ELECTRONICS FOR CACPACITANCE TOMOGRAPHY PDFDocument6 pagesTOMOGRAFO Design OF SENSOR ELECTRONICS FOR CACPACITANCE TOMOGRAPHY PDFVictor Jose BriceñoNo ratings yet
- MTech (DCN) DEC-I ManualDocument34 pagesMTech (DCN) DEC-I ManualMallikarjun DeshmukhNo ratings yet
- Vlsi Design: Paper Presentation ONDocument8 pagesVlsi Design: Paper Presentation ONYogesh YadavNo ratings yet
- A Platform For For Valodation of FACTS ModelsDocument8 pagesA Platform For For Valodation of FACTS ModelsJorge ZuluagaNo ratings yet
- Predictive ZVS Control With Improved ZVS Time Margin and Limited Variable Frequency Range For A 99 Efficient 130-W In3 MHZ GaN Totem-Pole PFC RectifierDocument13 pagesPredictive ZVS Control With Improved ZVS Time Margin and Limited Variable Frequency Range For A 99 Efficient 130-W In3 MHZ GaN Totem-Pole PFC RectifierMuhammad Arsalan FarooqNo ratings yet
- 10.1515 - Ijeeps 2021 03671 1Document14 pages10.1515 - Ijeeps 2021 03671 1Arkan ahmed husseinNo ratings yet
- I EECONDocument7 pagesI EECONUjjawal kumarNo ratings yet
- Capability Improvement of Over / Under Frequency Relays by Using A Hybrid Islanding Detection Method For Synchronous Based DG UnitsDocument8 pagesCapability Improvement of Over / Under Frequency Relays by Using A Hybrid Islanding Detection Method For Synchronous Based DG UnitsRama KrishnaNo ratings yet
- Enhanced Modelling and Early Detection oDocument8 pagesEnhanced Modelling and Early Detection oDalal HelmiNo ratings yet
- QPSK Modulation Demystified: Application Note 686Document7 pagesQPSK Modulation Demystified: Application Note 686Islam AhmedNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringFrom EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringNo ratings yet
- PONTES-Nelson Aka NeyllowDocument41 pagesPONTES-Nelson Aka NeyllowCamilo Caetano CarmeloNo ratings yet
- Megger Relay Test KitDocument178 pagesMegger Relay Test KitRK KNo ratings yet
- Lowe BS T 2015Document90 pagesLowe BS T 2015irfanWPKNo ratings yet
- Microwave NetworksDocument66 pagesMicrowave NetworksSanu RoyNo ratings yet
- Manual Do Estimulador Neuromuscular - Drager TofscanDocument28 pagesManual Do Estimulador Neuromuscular - Drager TofscanRenato NascimentoNo ratings yet
- ABB ABB ABB ABB: Type KD-10 and KD-11 Compensator Distance RelayDocument60 pagesABB ABB ABB ABB: Type KD-10 and KD-11 Compensator Distance RelaybcfochtNo ratings yet
- RLC CircuitDocument15 pagesRLC CircuitHaresh Verma100% (1)
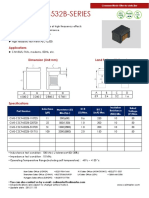
- CSCF4532BDocument1 pageCSCF4532BSeokjin KongNo ratings yet
- High Speed Memory Design Techniques An4010 12Document6 pagesHigh Speed Memory Design Techniques An4010 12Luis Daniel BinsakNo ratings yet
- Best Explanations EIS PDFDocument13 pagesBest Explanations EIS PDFAmbrish SinghNo ratings yet
- Beijing Quanxin Ultrasonic CO.,LTD: More Information of Ultrasonic TransducerDocument4 pagesBeijing Quanxin Ultrasonic CO.,LTD: More Information of Ultrasonic TransducerbG gNo ratings yet
- ABB Publication 1MRK509015-BEN C en High Impedance Differential Relay RADHADocument5 pagesABB Publication 1MRK509015-BEN C en High Impedance Differential Relay RADHAjavedsmg1No ratings yet
- Model SR780 Network Signal Analyzer: Operating Manual and Programming ReferenceDocument497 pagesModel SR780 Network Signal Analyzer: Operating Manual and Programming ReferenceLeonardo Kyo KabayamaNo ratings yet
- PrinCom Chapter 5Document9 pagesPrinCom Chapter 5Benjhon S. ElarcosaNo ratings yet
- Low Frequency Induction Calculation - Open ElectricalDocument7 pagesLow Frequency Induction Calculation - Open ElectricalDoly DamanikNo ratings yet
- HP Introduction To The Vector Network Analyser - HP8753ADocument62 pagesHP Introduction To The Vector Network Analyser - HP8753Arish91iNo ratings yet
- R Satish Kumar: Presented byDocument14 pagesR Satish Kumar: Presented byGopi RamNo ratings yet
- The Fundamentals of Electrical Energy SystemsDocument116 pagesThe Fundamentals of Electrical Energy Systemsolac17No ratings yet
- Briefing For Lab 1. Introduction To Vector Network Analyzer (VNA)Document6 pagesBriefing For Lab 1. Introduction To Vector Network Analyzer (VNA)NixNo ratings yet
- Sequence Reactance ManualDocument8 pagesSequence Reactance ManualJatin AcharyaNo ratings yet
- Long Transmission LineDocument6 pagesLong Transmission Linesushilkumarbhoi2897No ratings yet
- Frequency ResponceDocument8 pagesFrequency Responceضياء بن احمد الكباريNo ratings yet
- Ch2 Sig 12g PDFDocument35 pagesCh2 Sig 12g PDFAnkit palNo ratings yet
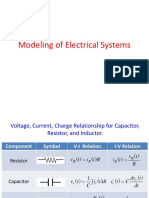
- Modeling of Electrical SystemsDocument51 pagesModeling of Electrical SystemsCheems PandeyNo ratings yet
- Tutorial 02 Ele 290 - Power Ac Circuits - QuestionDocument5 pagesTutorial 02 Ele 290 - Power Ac Circuits - QuestionAmiruddinMohktarNo ratings yet
- Protection Automation Application Guide v1 - Compressed (301 400)Document100 pagesProtection Automation Application Guide v1 - Compressed (301 400)Achraf RGUIGNo ratings yet